System Integration¶
System Integration – Mini Catamaran Final Project¶
### System Integration Plan
The goal of system integration is to combine all mechanical, electronic, and software components into one complete and functional system.
For my final project, I integrated the catamaran body, motors, battery, microcontroller, receiver, and control system into a single platform.
The system was designed to be modular, allowing future upgrades such as GPS, depth sensors, and environmental sensors.
CAD and Sketches¶
I created 3D CAD models of the catamaran body before fabrication.
The CAD design helped determine the placement of all components inside the catamaran.
The internal layout includes:
ESP32 microcontroller in the pantoon
battery positioned for balance for both sides
FlySky FS-A8S receiver near the controller
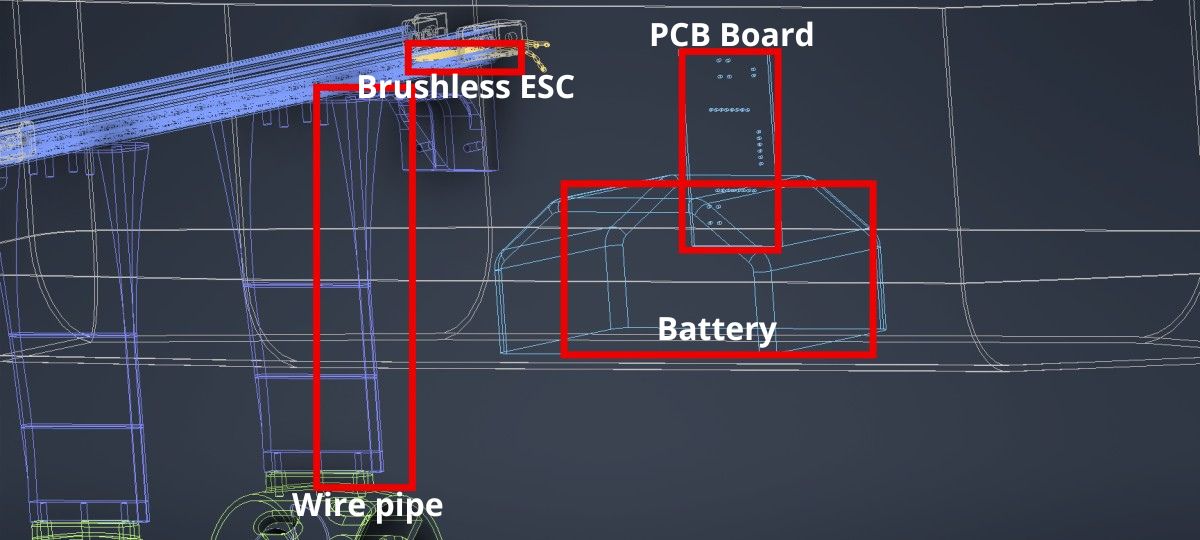
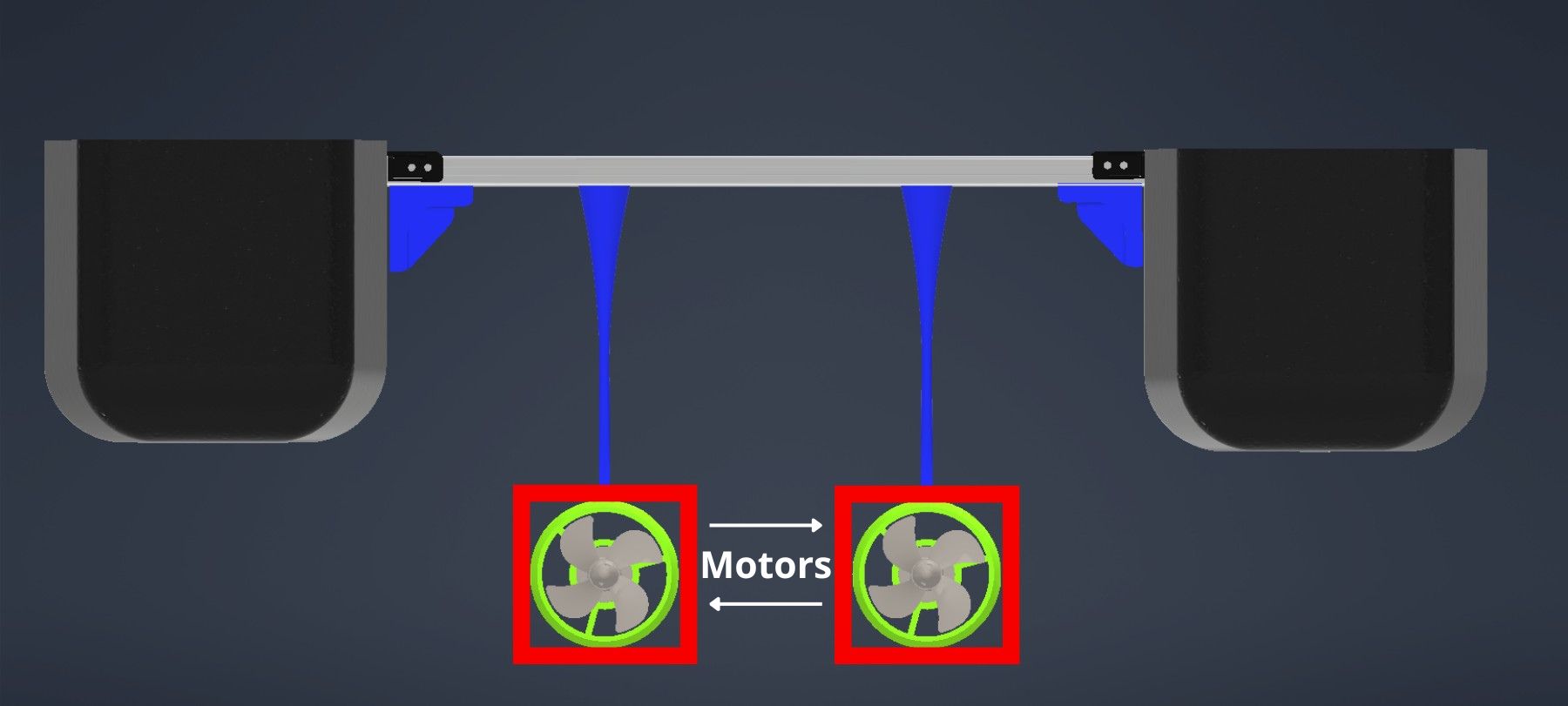
Two motors mounted at the rear
 ¶
¶
System Workflow¶
The system operates in the following order:
The FlySky transmitter sends commands. The FlySky FS-A8S receiver receives the signals. The ESP32 processes the commands. The motor drivers control the motors. The catamaran moves on water.
Future sensors will send environmental data to the ESP32 for processing.
Packaging Methods¶
The electronics were placed inside a protected compartment to reduce exposure to water.
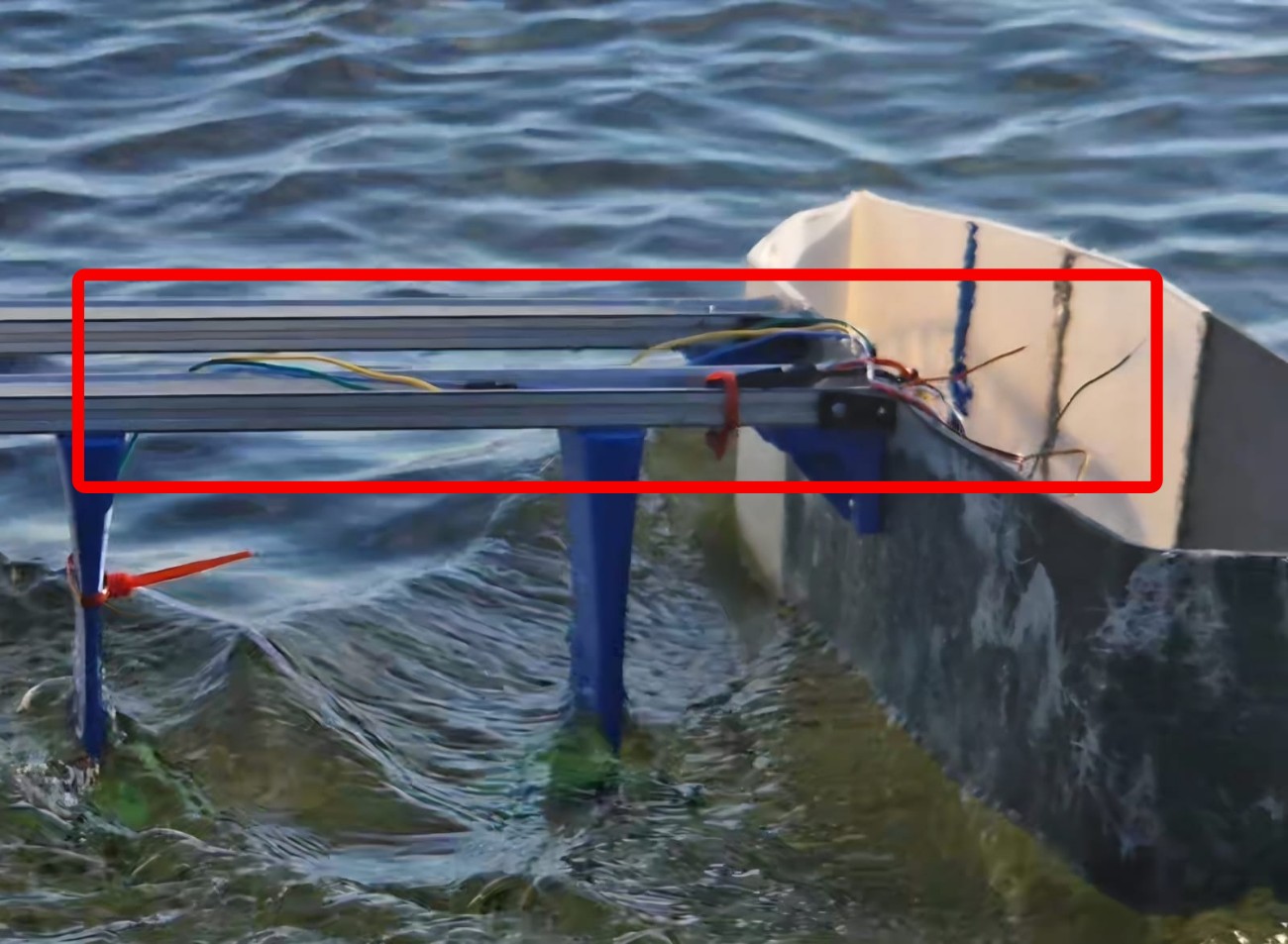
Cable management was used to keep the wiring organized.
The packaging design focused on:
waterproof protection; easy maintenance; balanced weight distribution; simple access to electronic components.

Finished Product Design¶
The catamaran was designed to look like a finished prototype instead of a collection of separate components.
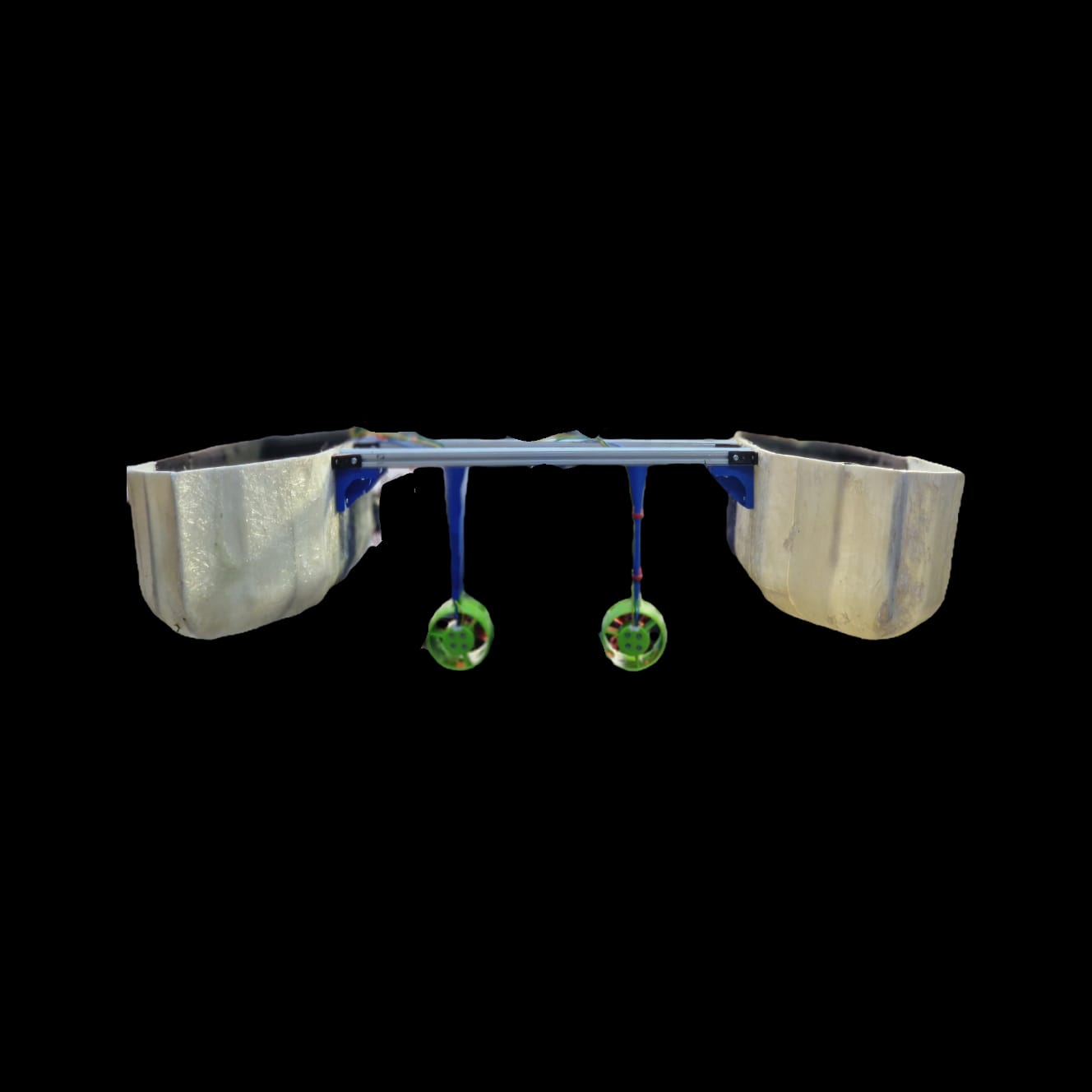
Special attention was given to:
clean wiring; component organization; symmetrical design; compact structure.
The overall appearance makes the project easier to maintain and improve in the future.