Week 13 - Moulding and Casting
Moulding and Casting¶
Task Description and Experience¶
In this weekly assignment, I completed an important and useful task for my final project . The main idea was to cover 3D-printed pallet models with a layer of fiberglass using epoxy resin and a hardener.

Previously, I had similar experience working with fiberglass, but I used a different type of epoxy resin intended for forming shapes rather than surface coating. At that time, I worked without a structured approach and often did not achieve full results.

For this week, I prepared better by selecting appropriate materials and tools. From my past experience, I learned several important lessons. Earlier, I used painting brushes, but they quickly became unusable because epoxy resin hardened them, turning reusable tools into disposable ones.
Safety is also very important. Improper handling of epoxy resin or lack of protective equipment can lead to allergic reactions, skin irritation, and respiratory problems. This is especially critical when using low-quality materials.


At first, I used medical rubber gloves, but they often tore and were uncomfortable, increasing costs. Later, I switched to construction gloves with coated fingers, which do not absorb liquids and are more suitable for this work. Instead of brushes, I started using a spatula and a roller, which improved the overall process.
Work Process¶


First, I prepared the fiberglass by cutting it to the required size using a knife and placing it onto the pallet model. Then, I prepared the epoxy mixture using a scale for accurate measurement.
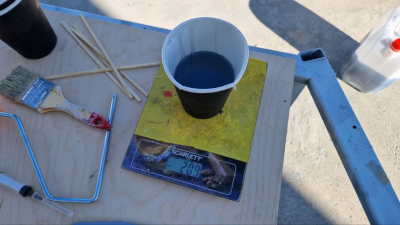

I poured 200 ml of epoxy resin into a container (450 ml capacity) and added the hardener. The ratio was 2 ml of hardener per 100 ml of resin, so I added 4 ml of hardener. After that, I mixed the solution thoroughly.
It is important not to prepare too much mixture at once because it begins to harden within about 20 minutes. Therefore, the work must be done quickly, applying the mixture immediately.
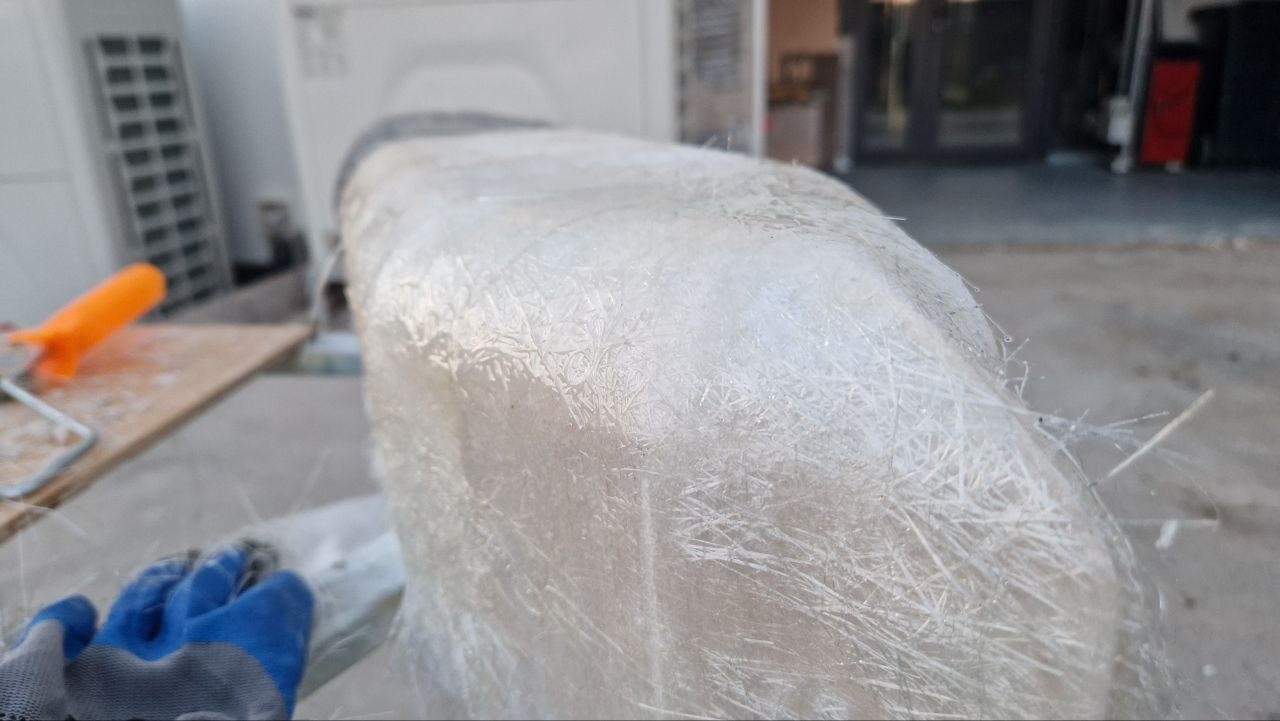
Using a spatula, I applied the resin onto the fiberglass in small portions and leveled it with a roller. I worked in gloves and avoided touching the material directly.



After application, I left the model to dry overnight. The material becomes significantly твердым after about 3 hours, but it is better to wait longer for full curing. Drying is more effective in open air, as indoor use may produce unpleasant odors.


Conclusion¶
The next day, I finished the surface by cutting excess material with a knife and sanding it with sandpaper. This completed the work.


