18. Applications and Implications, Project Development¶
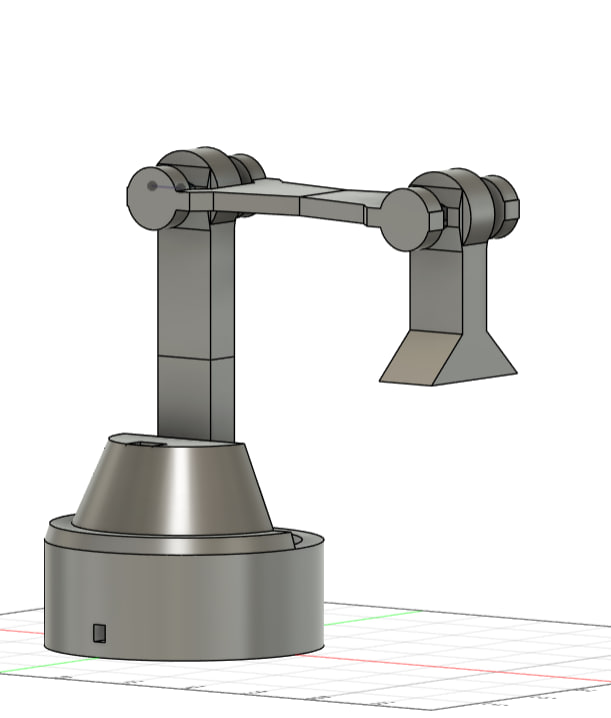
So for this week I defined and planned what I will do for my final project week What does it do? - It can pick up and lift things using its servos and the stepper. Also it is controlled through another device.
Who’s done what beforehand? - I only have experience with programming beforehand so everything else is completly new.
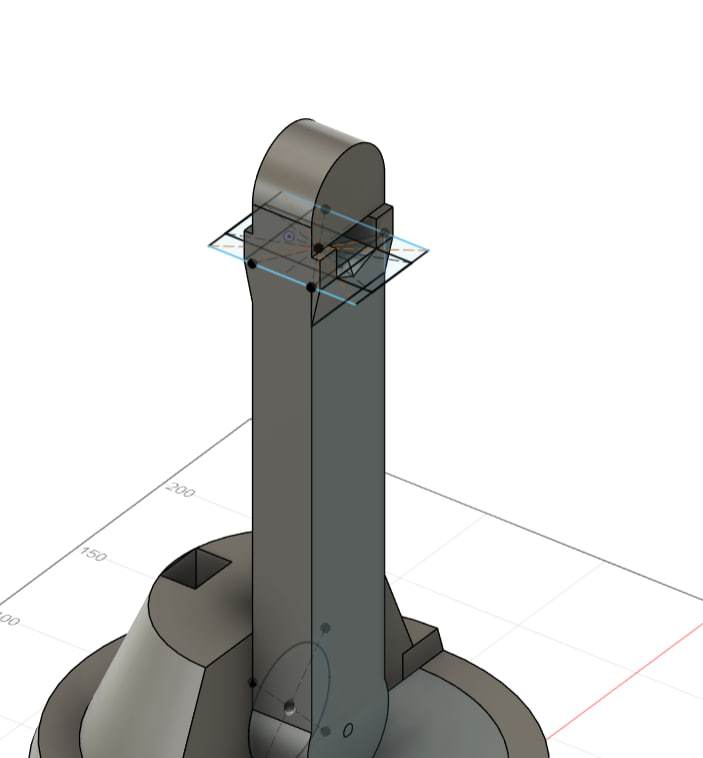
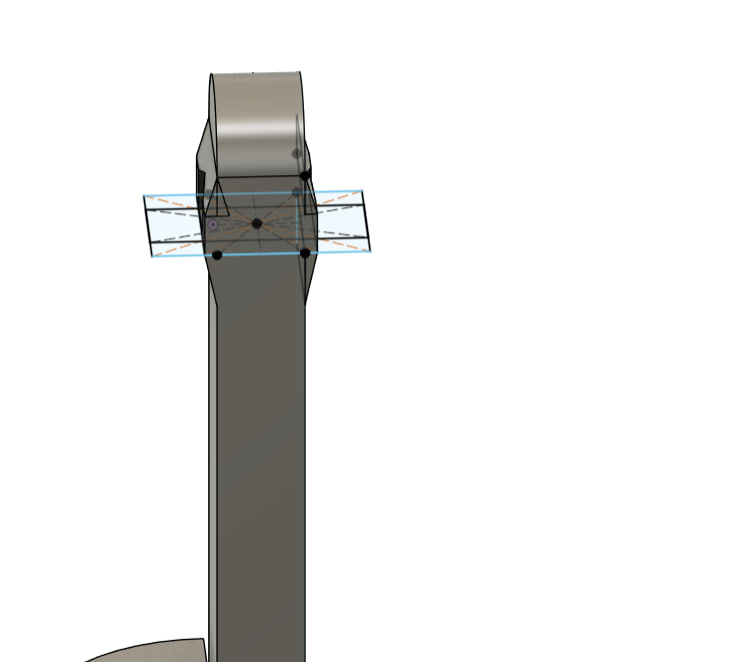
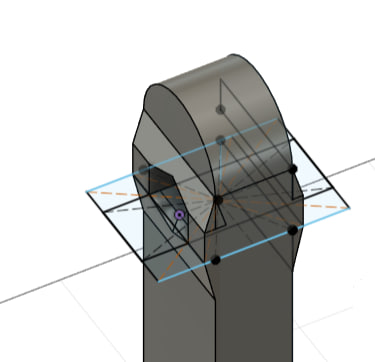
What did you design? - I designed the arm, the controller, the pcbs for it and everything in the process.
What sources did you use? - Youtube and Reddit mostly sometimes stack because I need code advice.
What materials and components were used? - One stepper motor, some servos, a few microcontrollers, josystick controller. Wood and plastic pla and vinil for materials.
Where did they come from? - FabLab.
How much did they cost? - Steppers cost around 10-20 euros. A servo costs around euro and I have 6 so thats 6 euros. There will be 3-4 joystics which will cost about 4 euros. There will be 2 esp32c3 and 3 xiao-esp32 that will cost about 30 euros total. so 50-60 euros for electronics and then the cost of the material for printing is around 10 euros not more.
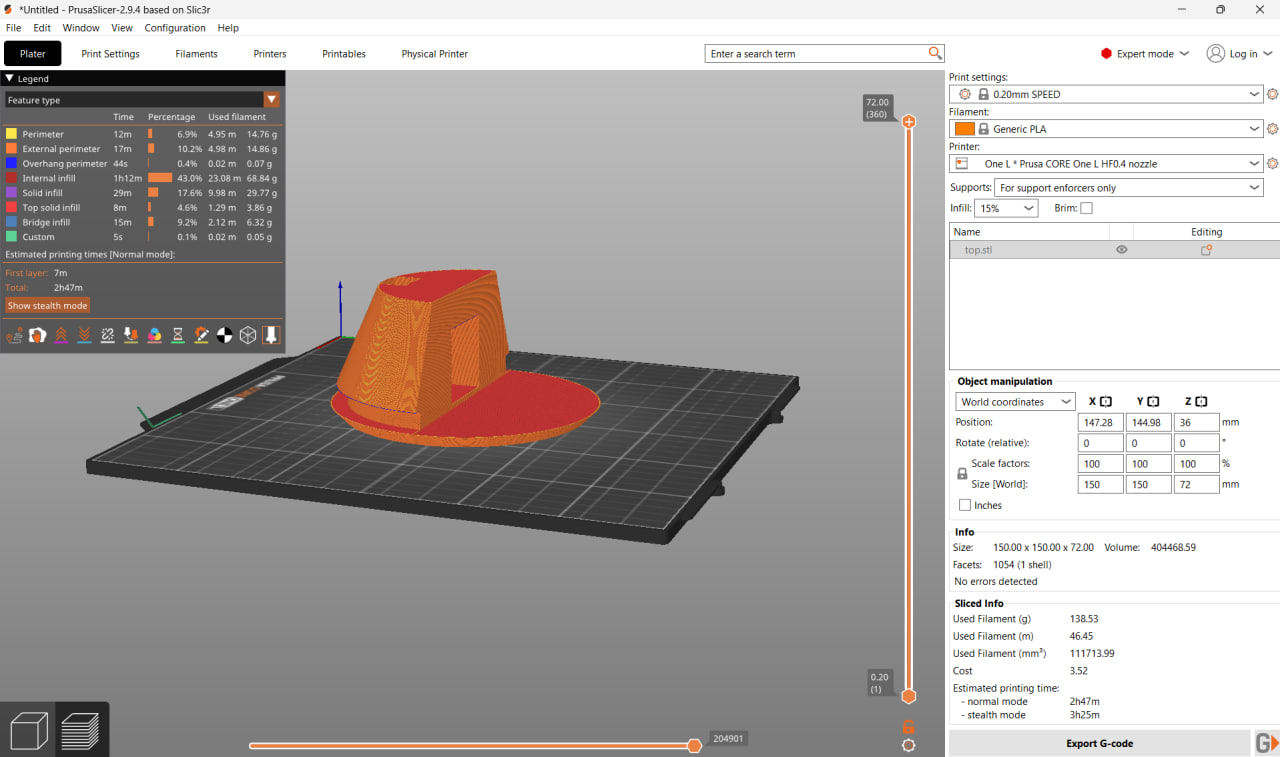
What parts and systems were made? Made 3 arm parts and the base with a rotating part where the stepper motor goes.
What processes were used? - 3D printing + Lazer cutting + Vinil cutting + UV printer + PCB mill.
What questions were answered? - How to build a robotic arm using fabrication. Whether wireless control using ESP32 microcontrollers would be reliable, whether custom-designed PCBs could successfully control the motors, and whether 3D-printed parts would be strong enough for the arm to lift objects.
What worked? What didn’t? - Printing the whole thing takes a bit too much time so to cut down on time cutting is just a good
How was it evaluated? - It would be evaluated by testing the movement of a robotic arm, the operation of the servos and stepper motor, wireless control trough the joystic controller and the arms ability to pick up and move objects. The results were compared against the original progect goals to verify that the system functioned as intended.
What are the implications?-The project is supposed to be a low cost robotic arm that can be designed and manufactured using 3d printing and such things. If it will move on command that will be enough.
So this is what I am doing right now.