16. Applications and implications¶
Individual assignment only this week.
assignment: Propose a final project masterpiece that integrates the range of units covered, answering: What will it do? Who’s done what beforehand? What will you design? What materials and components will be used? Where will come from? How much will they cost? What parts and systems will be made? What processes will be used? What questions need to be answered? How will it be evaluated?
requirements for final project: Your project should - incorporate 2D and 3D design, - additive and subtractive fabrication processes, - electronics design and production, - embedded microcontroller interfacing and programming, - system integration and packaging - Where possible, you should make rather than buy the parts of your project Projects can be separate or joint, but need to show individual mastery of the skills, and be independently operable
Final project idea¶
Fluff bot
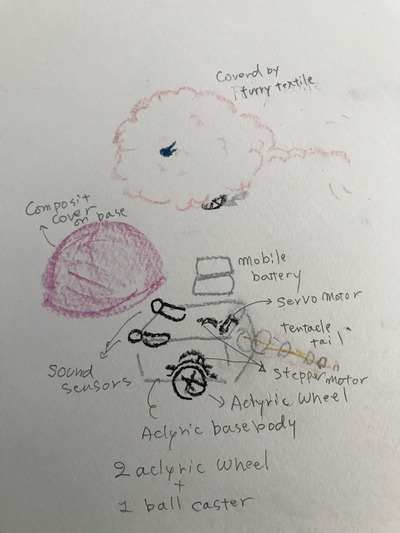
What will it do?¶
When user’s clap sounds, Fluf bot searching directions and approaching to user. Having furry appearance, wagging tail and toddling along might make you relax soon, Children can play with it.
Who’s done what beforehand?¶
I found several projects in prior years’ fabacademy studuent sites, which are very useful and suggestive.
Since this is my first original robot production, they helped me develop prototypes.
Research about
- Architecture ideas
- Motor options
- Wheel options
- Appearances
Architecture, Wheels and motors¶
Sumo bot displayed in fablab Kannai
- servo motor, MDF Wheel and ball caster
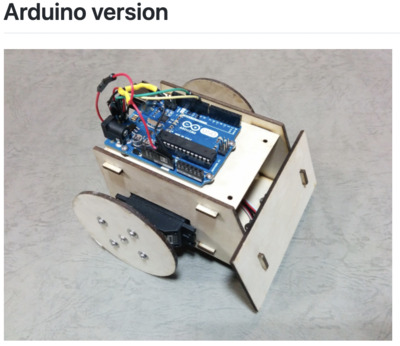
sumobot (Sumobot Jr is open source robot car kit.) original
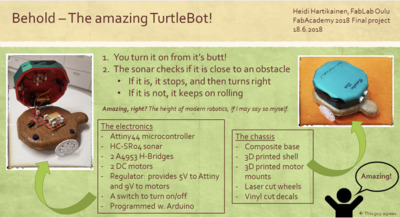
Turtle bot by Heidi (FA2018)
- DC motor and mold Wheel
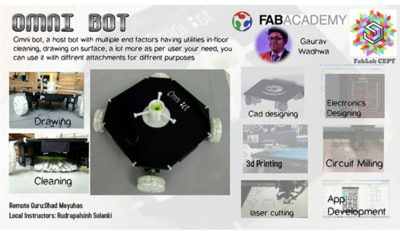
Omni bot by Gaurav (FA2018) - DC motor and 3D printed omni wheel
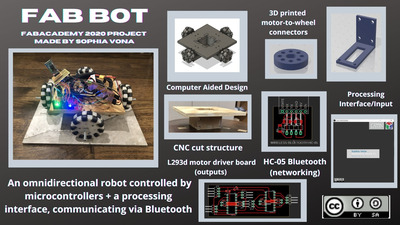
Fab bot by Sophia (FA2020) - DC motor and 3D omni wheel
Sound sensor¶
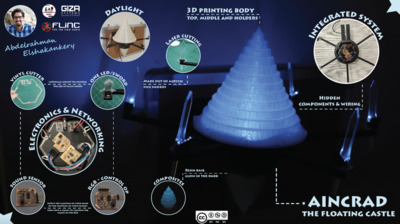
Aincrad
- MEMs analog sound Sensor used Mems to catch claps by Abdelrahman(FA2020)
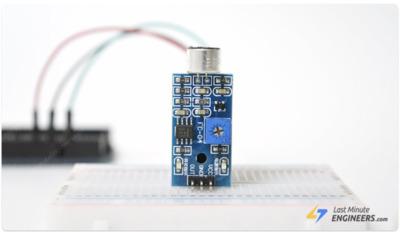
Interface Sound Sensor with Arduino and Control Devices With a Clap(Last minutes engineers)
- Erectlet sound sensor
Togemaru - Erectlet sound sensor and DC motor
used elecret in a commercial kit, which I tried build this kit. Contained 170 parts including lots of gears.

https://www.amazon.co.jp/gp/product/B07PRBR1NT/ref=ppx_yo_dt_b_asin_title_o06_s00?ie=UTF8&psc=1
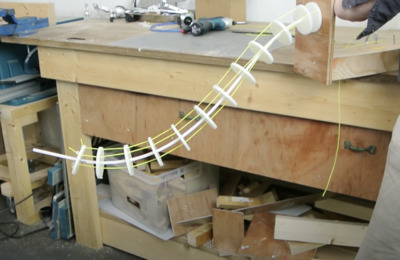
Tentacle Mechanism (tail movement)¶
YouTube - Snake Arm / Elephant’s Trunk experiment
Appearance¶
MOFLIN
I love an adorable appearance of Moflin. I want to create a furry robot.

What will you design?¶
- Circuit board
I designed a single circuit board for microcontroller, motor drivers for stepper motor and servo motor and supply connectors to 2 battery packs.
- Architecture
I am designing the architecture of my robot to choose options of each components. Catching clap sounds by Sound sensors have the robot recognize directions to move and also trigger its actuation. Once it stop movements, its tails will be wagging. Body size would be small, but batteries and electric components should be put inside the body.
What materials and components will be used? /How much will they cost?¶
Bill of materials (WIP)
| Item | Model | Qty | Unit | Price(JPY) | Source | Site |
|---|---|---|---|---|---|---|
| Stepper Motor & Motor driver | 28BYJ-48 & ULN2003 | 2 | pc | 300 | Amazon | link |
| Servo motor | MG995 Analog Servo | 1 | pc | 850 | Amazon | link |
| Mobile battery | cheero Canvas CHE-061 3200mAh | 2 | pc | 2,500 | Amazon | link |
| Sound sensor | Sound Sensor Module for LM393 | 2 | pc | 300 | Amazon | link |
| M3 Screw / Nuts | 1 | set | 765 | Amazon | link | |
| Burlap | 1 | m | 1,000 | Amazon | link |
What parts and systems will be made?¶
I will make circuit board, body parts such as base body, base cover, wheels, tails and furry outfit. I will write down programs to actuate movements, sound sensors, stepper motors and a servo motor.
What processes will be used?¶
- Electric production for designing and producing circuit board(s)
- Laser cutting for creating base body and Wheels
- Composite for creating base cover
- 3D print for creating case of ball caster
- Interfacing microcontroller using Sound sensors
- Programming to actuate the robot
What questions need to be answered?¶
I experimented several options about motors(DC motor, stepper, servo), motor drivers(DRV8835,ULN2003), wheels(3D, Laser cutting), Sound sensors(MEMs digital, MEMs analog, Erectlet). I think I would answer what I learned from them.
How will it be evaluated?¶
My main goal is that the robot moves by interacting users. Clap and move. I would like to try to realize good timing of the interactions.
Post the Presentation works¶
The remaining issues are,
-
Fluf BOT itself is making “Sounds(noises)” such as sounds of motors and sound of skull & boxes when it moves and the sound sensors react to the “Sounds” in addition to my claps.
-
It is not clear when Microcontroller takes signals from the sound sensors. It seems that Microcontroller takes signals once completed the loop formulae and it is not easy to know when it happen.
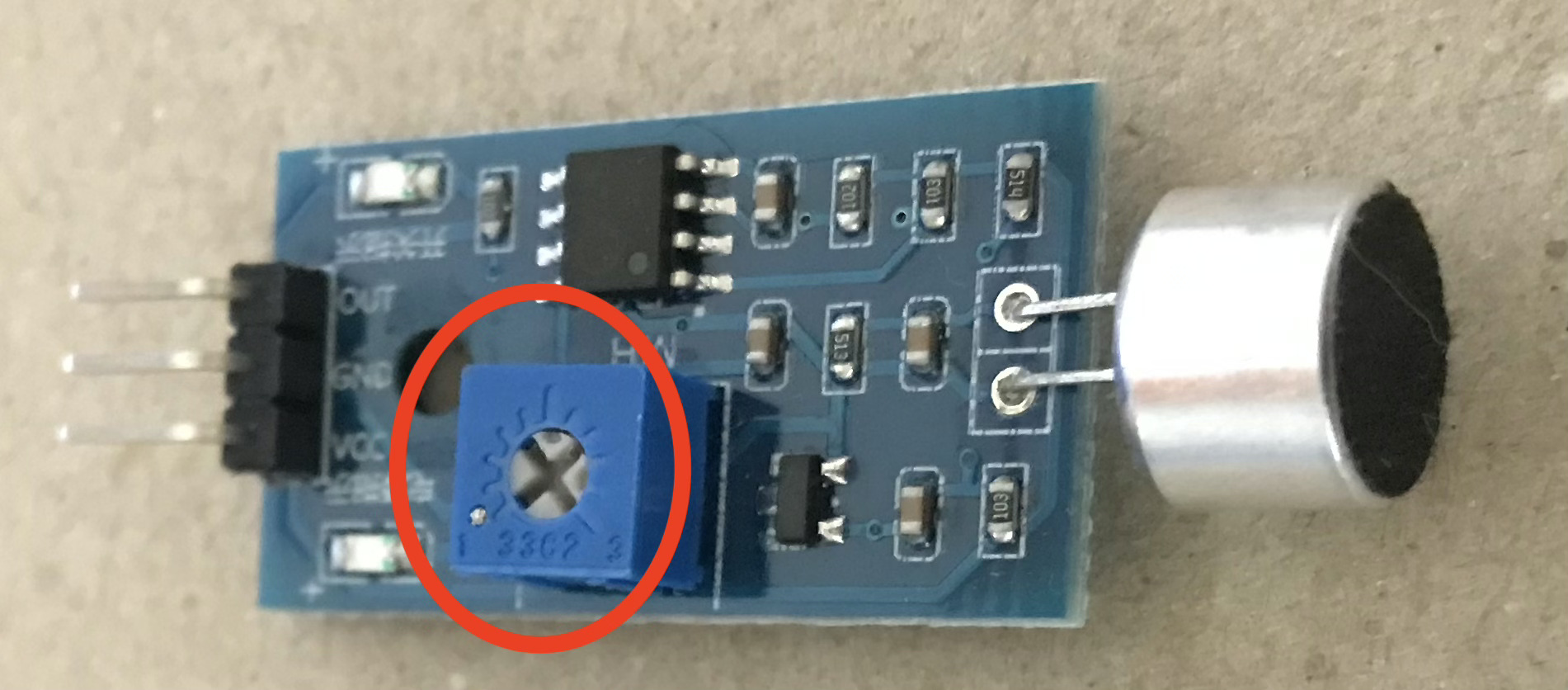
LM393¶
I used two LM393 sound sensors for Fluf BOT in the presentation. Each of them has a potentiometer to adjust its sensitivity manually.
In order to avoid reacting the sounds other than that given by me,
- Need to lower Sensitivity
- Goes too low makes nothing happen
- Need equal sensitivity about Right and Left sensors
- Goes a bit high sensitivity, both sensors send signals as “High” and always Move forward.
Conclusion :
Worked on adjustments a couple of days. But still could not find good tunings. It is having limits to control Fluf BOT’s by adjusting sensitivity of sound sensors alone.
Max 4466¶
Max4466 is an adjustable gain electret sound sensor. Since it can measure voltage of signals, it might give me additional way to control signals processing in microcontroller.

With changing sensors to Max4466, I updated the program as well.
- Changes from digitalRead to analogRead.
- Set threshold to control signals
- Add breaks(moveStop) to wait Claps(Sounds from outside).
About Fluf BOT’s physical sounds,
- I made sure if Max4466 well placed at ear hole.

- Since Max4466 capture even finger touch to it as signals, I put a piece of plastic bags in ear hole too. It might amplify a sound physically.

- Fix Skull and box to reduce rattling sounds
