Week 15 : Assignment
- For mechanical design Week we want to make mechanism for the Marble maze puzzle.
Purpose
As I mentioned above we wanted to have made something fun game in machine design we are going to make fun of the marble maze and wanted to control the maze Rotation with servos below, for now, we started working on the mechanical part. Visit the Group website for more detail.
Inspiration
Our inspiration for the project was the [amazing] Maze made by Katie Levine and our regional instructor Ohad Meyuhas.

Input
Our main objective is to control the Marble maze with Hand movement. So our input is Hand gesture which will control the Maze. we are using an accelerometer sensor for giving inputs. the accelerometer will give the relative value of x and y position and according to the value, Servos will rotate for a specific degree..
output
Our Mechanical output is Rotation of servo limited to a specific degree. we are planning to rotate the servo 20 degrees. It will rotate the maze around 40 degrees.
My Role
In Mechanical Design Me and Dhruv Thakkar took responsibility for making the mechanism of Marble Maze. Many
marble maze has already been made, we wanted to try different mechanism for our maze.
As a team, we did all work together and help each other when needed, but My special task was to make sure the mechanism shall able to handle the Load of maze after Finalizing the design phase with Dhruv Thakkarr I
took responsibility for making upper part of mechanism and he will see the Base part.
Design phase
in the initial designing process, we started with reverse engineering Katie Levine. instead of using four servos We though we may able to use Two Servos
with long arms which will rotate the Maze as we want!
We came to the conclusion that we will place this servo in the center of the maze. But the challenge was how can we place the servo which will be able to move the maze and X and Y axis which center point will lie only on the One
Z-axis. If we don’t design the base correctly it will tilt on the side by the time and create a moment on the servo which will Tear off the servo and the mechanism will fail.
initial Base design
In the initial design, Dhruv came off with the below idea. The idea was good and our Objective of the same Z-axis was fulfilling. But there was little concern about load it was not advisable to put Load directly on the servo Shaft. We are going to use MG995 servos - tower pro for our mechanism. This base idea is forgetting the initial idea, later he designed a stronger servo mounting base.

solution
so We found this problem very necessary to be solved, one way it could solve it to make one Gear Drive Designed for the taking the load and Applying the Torque given by Servo to Maze.
I started making Gear drive according to requirements. I estimated a total load of around 3800 gram.
Gear Specifications :
Module : 2 : Lower module for High torque Conversion
Pressure angle : 25 Degree Higher pressure angle for better torque handle capacity
Gear(Reduction) ratio : 2:1 : for Double the Torque
I designed gears on fusion 360 with the help of FM gear script. check week 8 for more details.

Possible Gear SERVO Assembly

mechanism
In mechanism I started working on the cad model, as we finalized the base I designed the base according to that, my scale was 0.5. our objective for making cad is to test the mechanical joints and to know which type of joint
assembly will fulfill our purpose.
We used two type of Joints
Ball Socket Joints on top
Pivot joints bottom
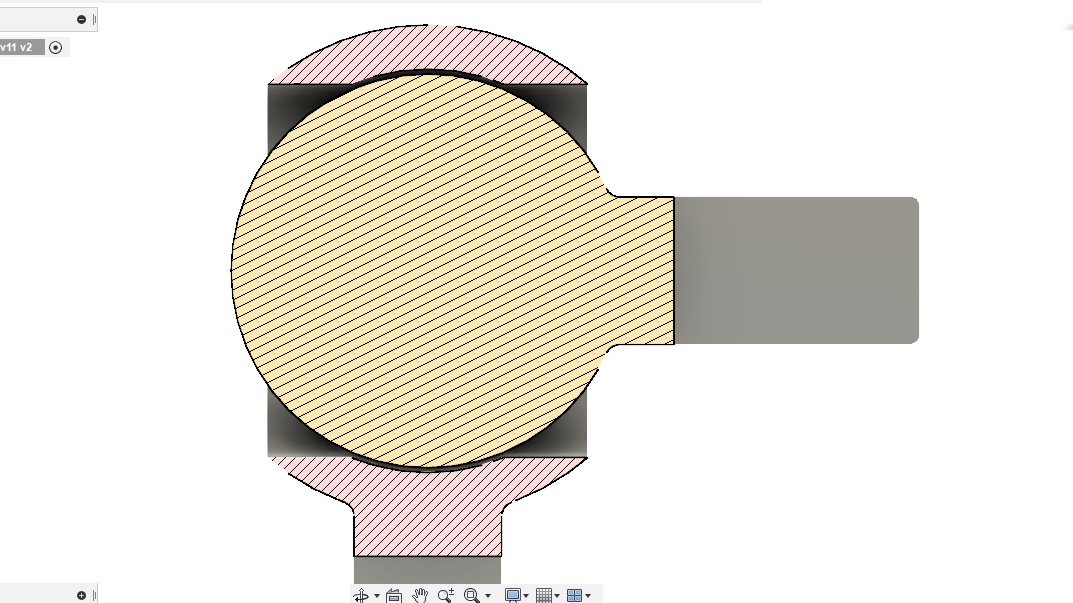
Ball socket Joint
I started designing the ball sockets then, we wanted 40 degrees of inclination in Maze. For that, I started designing joints which will have 40 degrees of movement. below is the first design I tried!
Fusion 360
Visit week 3 for modeling in fusion 360.

Clearance
I gave clearance Of 1 mm.
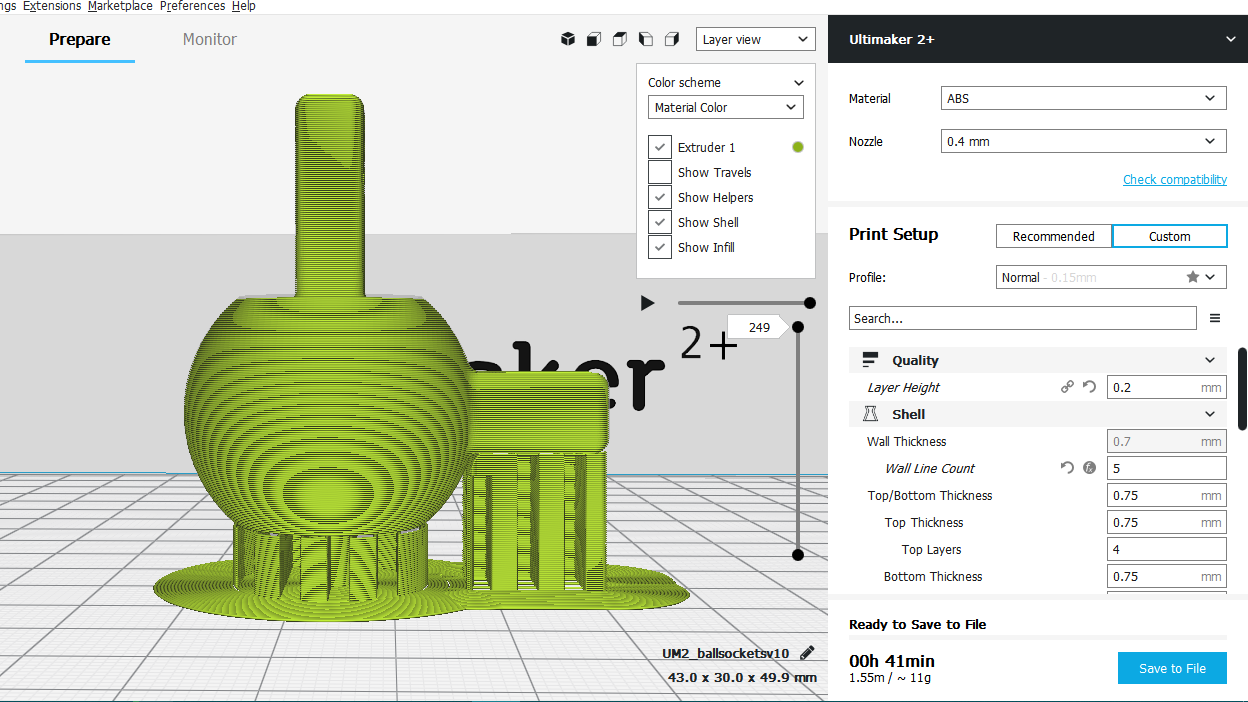
Cura softwere
visit week 6 for know parameters in Cura.
Layer height : 2 :
wall line count : 5
Infill density : 15 %
Print speed : 80 mm/s


parametric file of Arms
Parameters I have given, check week 4 and week 8 for more parametric work!
Arm length : ball socket vertical arm length
Ball socket outer diameter
Distance : Distance between centers of two gears which will be subtracted in vertical arm
Length-Horizontal : Horizontal length of Arm
Length-vertical : vertical length of Arm
Width : Width of Arms
thickness : Thickness of the material


Self Locking mechanism
I wanted to try a Self-locking mechanism on the mechanism, it will eliminate the use of mechanical fasteners there. I have to do some iterations to get perfect dimensions so it can give require compressive force on joints.
For clamping or Fitting the Arms in the ball socket I was thinking to make One self-fitting mechanism, so I 3d print some rectangle slots in which inner dimensions are lesser then outer of socket arms when it spreads, it will create
compressive force and the assembly will stick in.


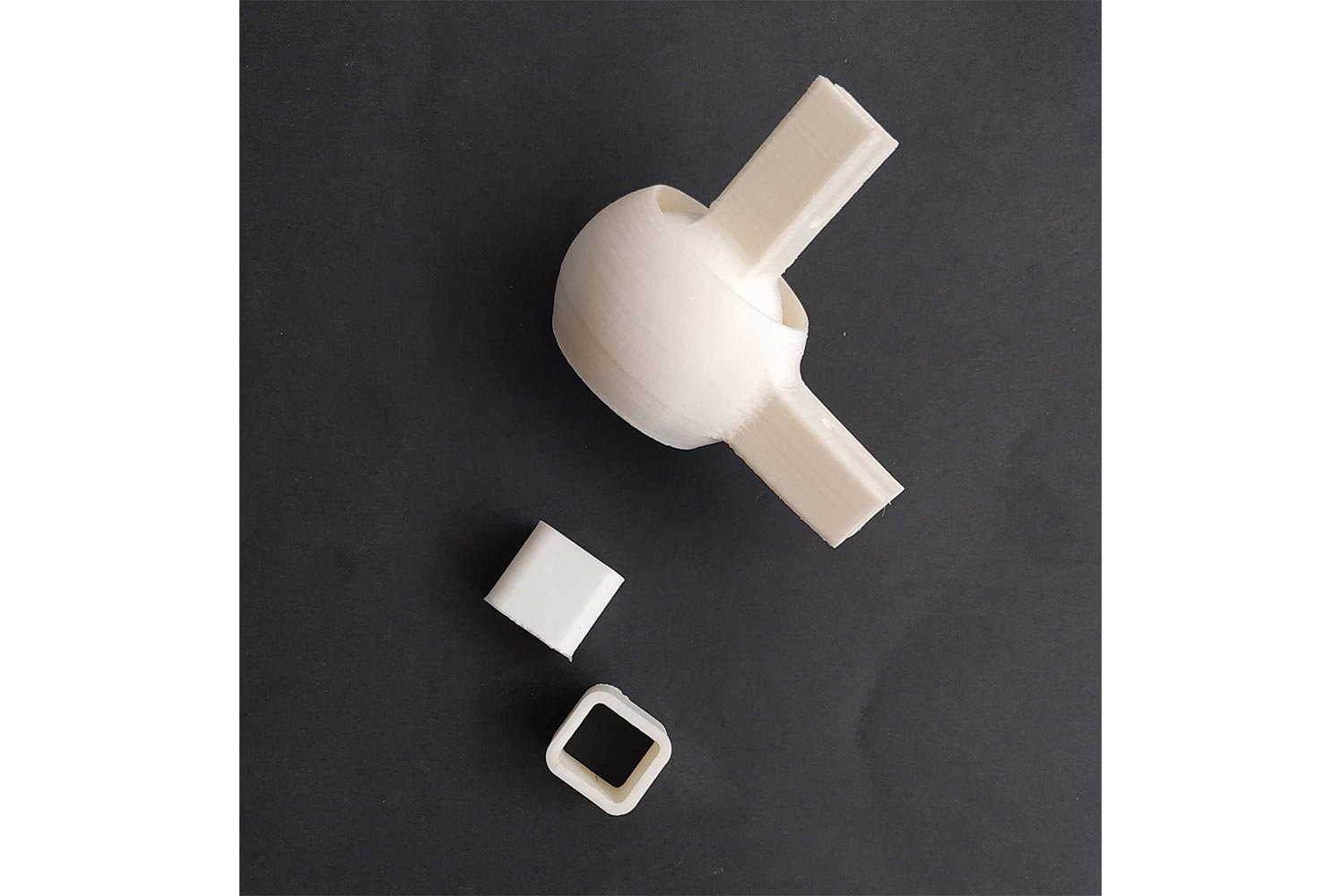
Coupler
We also made one 3d printed Coupler which will hold the Pinion gears to the servo with the help of friction. we just wanted to make it for demonstration purposes so we can know Everything will be good in a bigger scale, for bigger scale we
intended to use a Coupler comes with a servo and mount it with a center screw which will sufficient to transfer a large amount of torque.
The dimensions Of Box are perfect and the Gear profile is great.

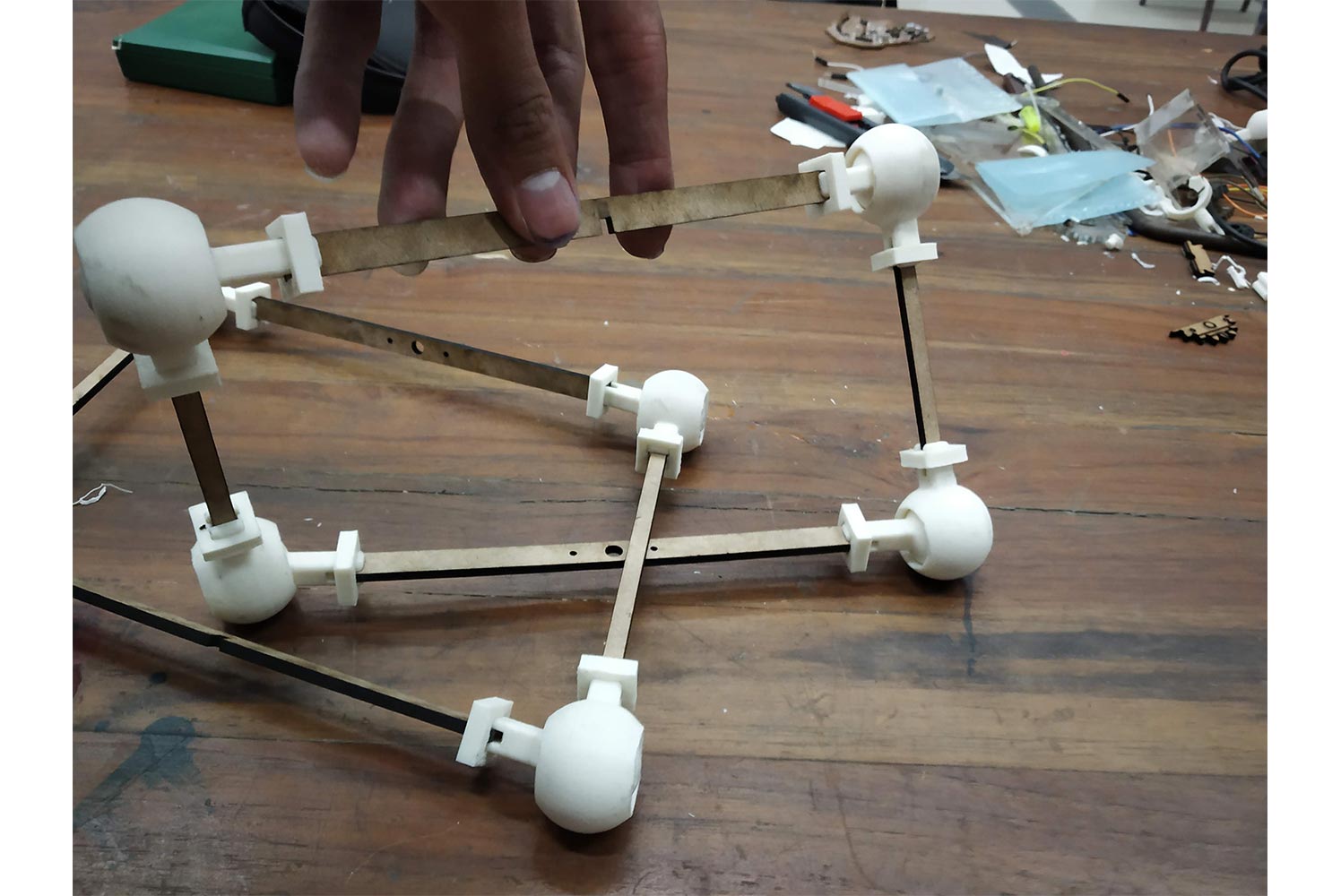
Assembley of prototype
In assembly, we just started joining our Top and Bottom assembly. Dhruv made a great base for Servo and gear assembly we just fix them and check as it can work or not.
In the prototype, the mechanism is working perfectly Fine now the only thing we have to deal with is the load capacity of the mechanism.
Final version
For the final mechanism Dhruv started designing a bigger base and did some improvement we found on a smaller scale, I also start working to make bigger ball sockets and arms. for the final design, our maze will be approx. 20 inch wide so I decided to make it 16 inches wide: 400 mm
AutoCAD
check out Week 4 to know laser-cut in detail.


Ball sockets
For the bigger model, I had to designs ball sockets that can be capable to handle large shear. I increased Arm length with thickness, if I kept the sphere dimensions the same I will not able to get a degree of freedom I wanted in design, so I had to increase sphere size, it will increase printing time, but it was the only way to maintain strength.
First version
Second Version
I made a second version in which I increase fillet on a slot so it can be safer in Action
Self locking mechanism

Gears
We Doubled Gear and Pinion size, that was the only modification in gear
All the components

Final Assembly of mechanical parts
Dhruv Thakkar worked on base and we combine our works. below are some of the pictures of it.


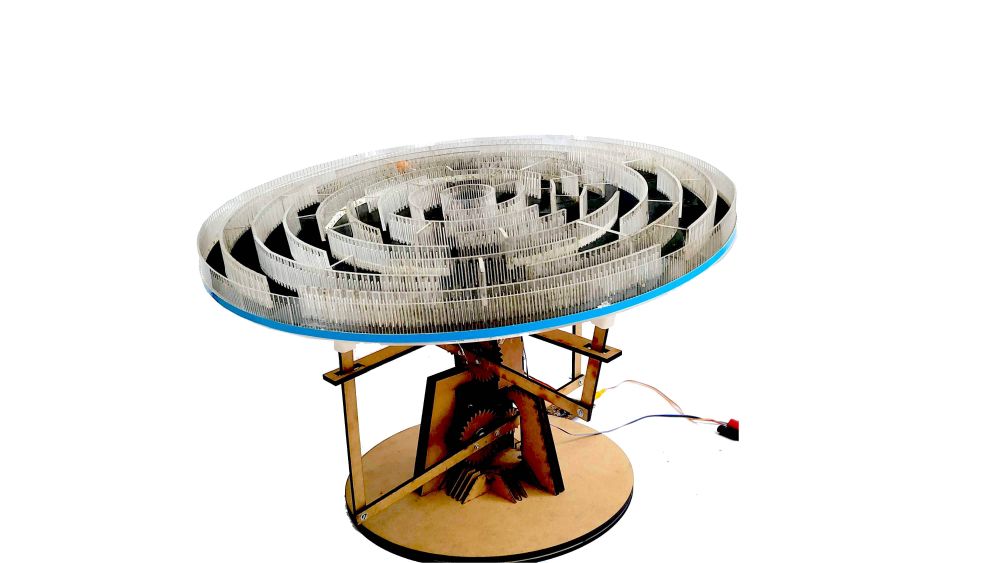
Final Assembly of Whole Machine
- Me and Dhruv Design mechanism
- Samiul Designed Electronics
- Karan tanna Designed Maze
- Maharshi Documented all process
Final video
Slide

Group work
Visit the Group website for more information. Click here.
conclusion
We applied our all our major in in this two weeks ! get to learn more on that also, whatching machine working gave us great sense of Happiness.