Menu
HomePrinciples and Practices
Project Management
Computer-aided Design
Computer-controlled Cutting
Electronics Production
3D Scanning and Printing
Electronics Design
Computer-controlled Machining
Embedded Programming
Molding and Casting
Input Devices
Output Devices
Interface and Application Programming
Networking and Communications
Mechanical Design
Machine Design
Wildcard
Applications and Implications
Invention, Intellectual Property, and Income
Project Development
Final Project
Week 16
Machine Design
Week Assessment :
Actuate and automate your machine.
Document the group project and your individual contribution.
Group page for MTM week
Mechanical Design week
My individual contribution for this assignment was interacting with my group members to make the step motors work.
But before that, I download the Universal G code sender from GitHub. In GitHub, I found another link and I follow the instructions in this page. To be able to use Universal G code sender I had to download JAVA, because Universal Gcode Sender is a self-contained Java application which includes all external dependencies, that means if you have the Java Runtime Environment setup UGS provides the rest. This information from UGS in GitHub
I did a research about how to use Universal G code sender and I found this tutorial
We had a meeting with Moath and he gave us some tips and bits of advice. He talked with us about one of the important things in management with is a deadline and our mistakes how we work an inefficient way
Communication between us because we don't write in our pages which each one did. It became harder for others to continue the work sometimes we had to do things twice then we figure it out that one of us did it but he didn't mention that.
I did some research about the component what we will use.
limit switch ( A limit switch is an electromechanical device that consists of an actuator mechanically linked to a set of contacts. When an object comes into contact with the actuator, the device operates the contacts to make or break an electrical connection.) This information from wikipedia
GRBL (Grbl Controller is software that is designed to send GCode to CNC machines) more information.
The stepper motor does not rotate in a continuous fashion like a conventional DC motor but moves in discrete “Steps” or “Increments”, with the angle of each rotational movement or step dependant upon the number of stator poles and rotor teeth the stepper motor has. Because of their discrete step operation, stepper motors can easily be rotated a finite fraction of a rotation at a time, such as 1.8, 3.6, 7.5 degrees etc. So for example, lets assume that a stepper motor completes one full revolution (360o in exactly 100 steps.This information from this website.
The driver is nothing but a circuit arranged to make switching simple and “secure”. The voltage rating of stepper driver is more than micro-controller. So you can easily control the stepper motor of given voltage rating using the driver of that rating.This information from this website.
when I was looking for how to make a machine they mentioned something called micro stepping. I thought this is a unit for stepper motor movement or something that related to distance. I ignored this part when I was searching cause I felt that it hard for me to understand it. till we faced an issue in the motor when we connected to UGS.
The sound of the motor was horrible, to be honest, I thought this is a normal sound of the stepper motor. cause most of the motors are noisy. MOATH said this is unnormal sound and we have to find a solution for it. He takes the machine and he tested with Hashim they came with a solution but he didn't tell us. He wants us to figure it out but he gave us a hint what do we have to write in Google, and I toked this part because it seems no one would like to take this part. We felt this is a hard part to find a solution for the noise.
Anyway, I toked this part. As I mentioned before Mouath gave us a hint. the hint was to search in Google (microstep setting for CNC shield) and I found a good blog the mentioned how to wire the shield in details..
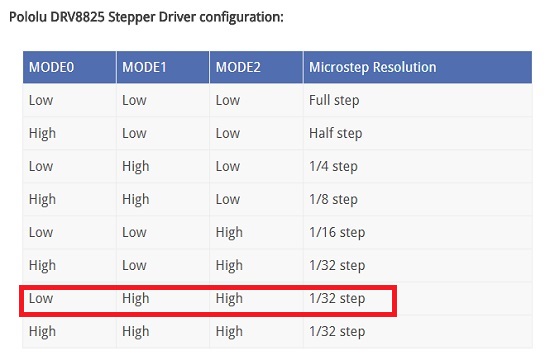
I showed this blog to MOATH and he told me that I have to do similar to what the blog mentioned we need to use a jumper. MOATH told me that we don't have this jumpers so he gave me an alternative solution which is soldering. I solder all the pins then I went to Hashim to check if I am doing the right thing. I don't want to damage the shield beside I not fully understand what this jumper means and why there is a sound from the motor and that is the table that is mentioned in below this step.
High means there is a jumper and Low means there is no jumper so in our case we are enabling 1/32 step
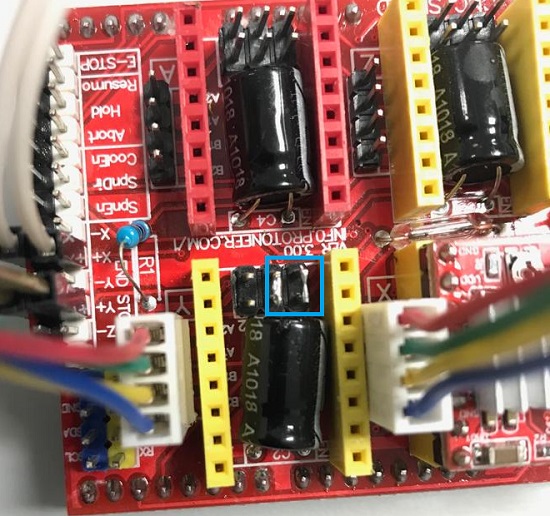
Basically, I did a thing that I don't know that it is but I know that I have to do it. Whatever Hashim told me that I have to solder only the first two pins, not all the pins and I did that.
We test the motor after that, I think the motor sounds normal now because it sounds like the ultimaker machine.
I asked MOATH about what happened why was there a sound from the motor? and that happened when I soldered the pins? I know there was a relationship between that table and the pins but I did not understand the relationship, so I asked him about the table what does it mean and what is Microstepping? he answered me and showed me a good PDF file that describes what Microstepping and the table.
I also calculated the steps per 1 millimeter with Eidha.
More details on the group page.
This is our lively machine.