
Things to do :
- Explain your individual contribution to this project
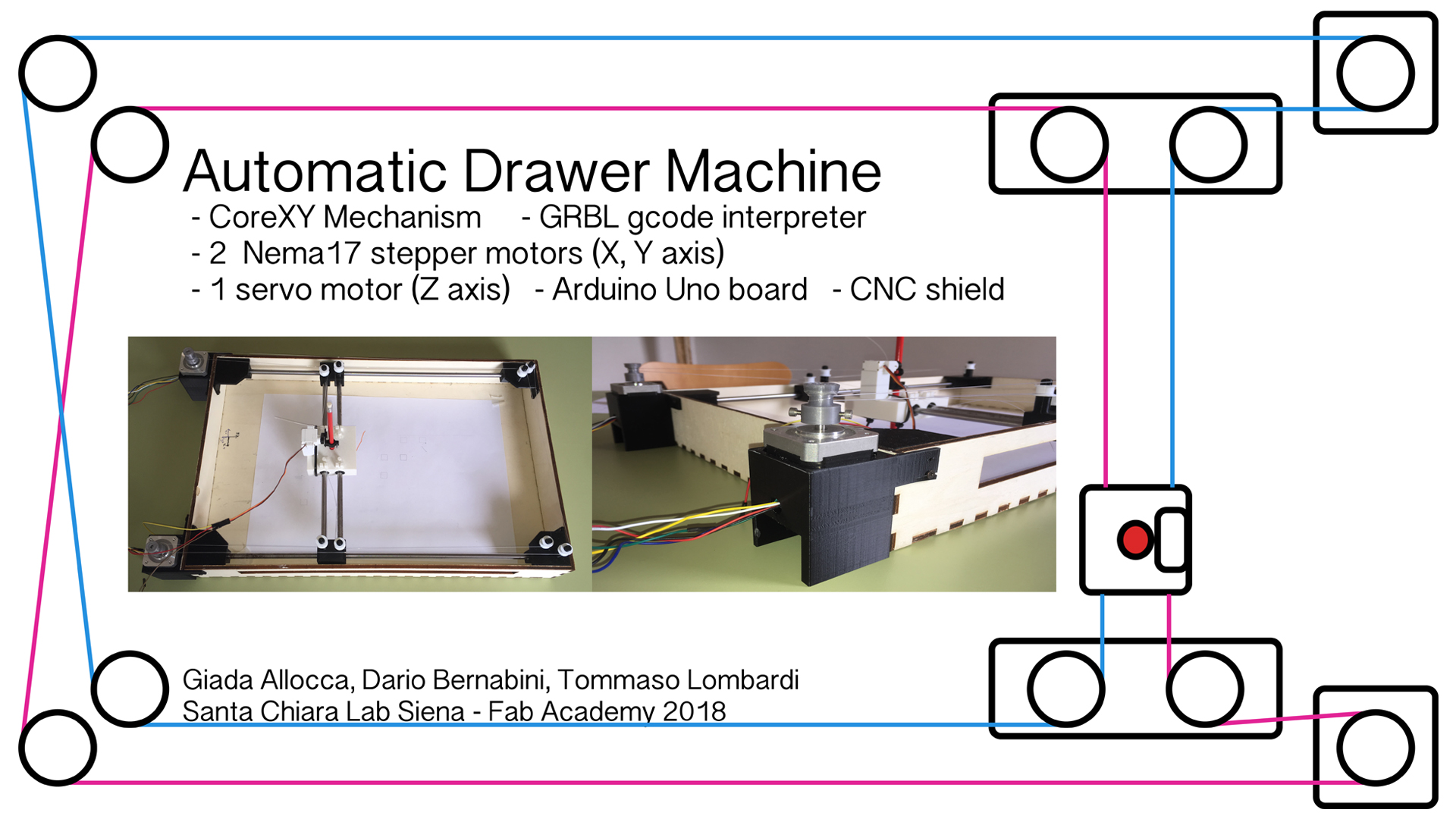
Configuring GRBL
For this week my individual contribution was to configure GRBL.Here there is everything I needed to know.It's a complete guide that teach you how to configurate GRBL.
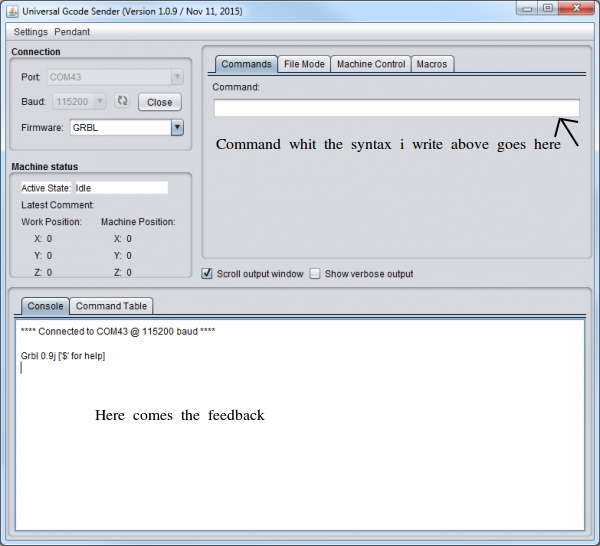
Every configuration were made via Universal Gcode Sender (link to the UGS's github repo):
The x of $x=val indicates a particular setting, while val is the setting value
Photo tooked from here and modified to show how i did it :
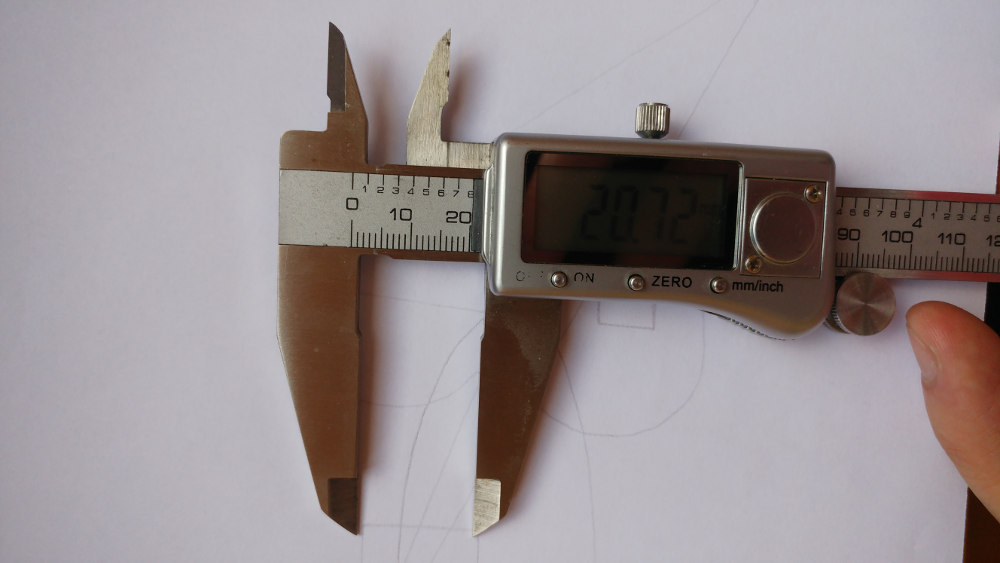
Once I finished configuring we tried to draw a 2cm square to test if the measure we wanted were respected. The lenght of each side of the square were wrong :
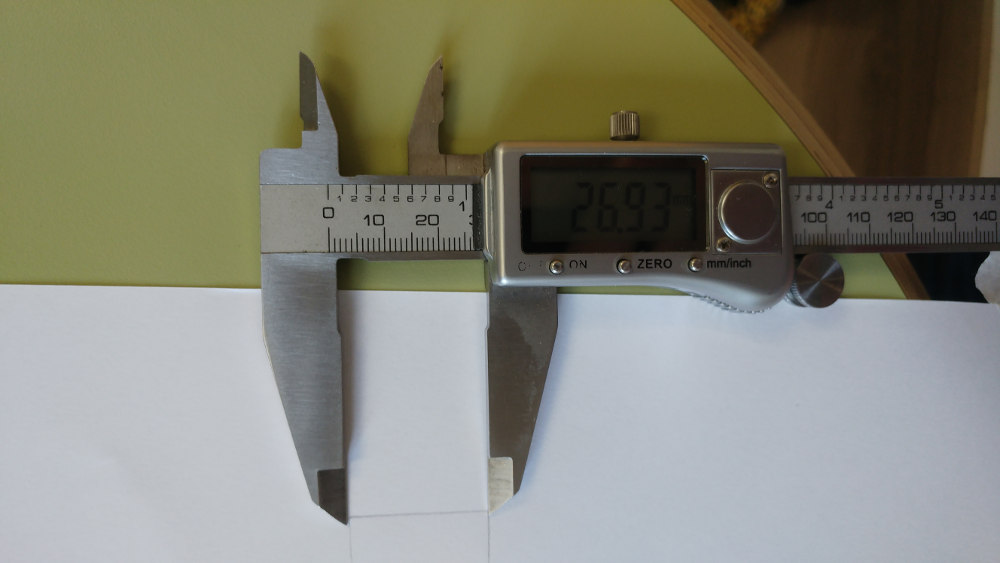
The $100,$101 parameters were setted wrongly. Here is the official description :
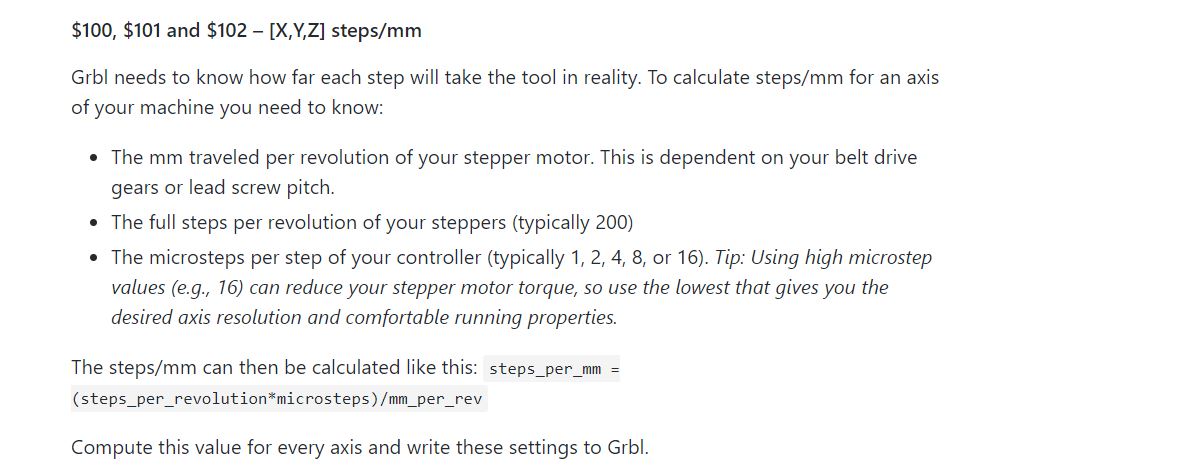
For the last Formula is useful to know that we used 2 Nema17 Stepper motor that needs 200 steps per revolution.
We setted the microsteps per step by 8 so the last variables to know was mm_per_rev.
To find the mm per revolution was enough to use the formula for the circumference length : 2*Pi*Radius ,where the Radius is the radius of the pulley we designed(5mm in our case).
Once we found the correct values we setted them by serial comunication using UGS and the reasults were pretty satisfying
Link to the group page
