Caution! José Figueroa at FabAcademy 2013
Weekly report of my work at FabLab Barcelona
The group's project was to modify the MTM Snap according to the materials available at the FabLab. Most of the documentation can be found on the website of my classmate Paul Girón. The main problem was coordinating everyone's ideas to approach this challenge. One option was using a timing belt for the translational mechanism on all three axis. This way, we could work around the original design and not use parts that were not available to us. Any other missing parts we would have to build, including perhaps the timing belt.
My contribution to the group project was the testing and design of proposals of timing belts, review of the GRBL software that was to be used by the microcontroller, and drawing on Kokopelli of the platform bed of the MTM Snap for milling on the HDPE material. For the testing of different fab-made timing belts, we designed and laser cut acryllic gears to fit in the shafts of the stepper motors. Different timing belts were also laser cut in a flexible material. None of the designs really convinced anyone, so the timing belt design was put on hold. Parallel to this work, I was assigned the task of reviewing the GRBL code which was going to be in the microcontroller. After reading the whole code, I found that it would only be necessary to change parameters in the settings.h and config.h libraries, according to the design we would make. The GRBL code can be found here. For the drawing of the platform bed, I chose to do it using the Kokopelli software for two reasons: classmate Francisco Sánchez had started work on the group project using Kokopelli already, and the other reason is that for some time I had wanted to learn to code in Python, so this seemed the perfect opportunity to start. Unfortunately the drawings I did I saved them in a folder that was accidentaly deleted, so Francisco had to redraw the platform bed. Other drawings I did in Rhino can be found here.
Below you can see the video of the explanation of my original proposal for the timing belt design for the MTM Snap. This was made with classmate Jean Pierre Paulet after much deliberation of the work that had to be done.
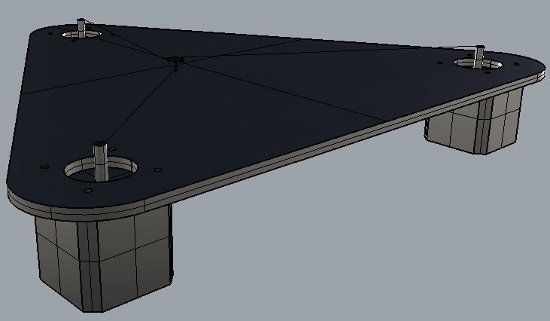
This machine could not be done because the Shopbot would not mill the parts correctly and the snaps did not fit. It was decided to change to another project, the drawbot, for which I made some 3D modelling to aid with the design. The purpose of the drawbot was to use the stepper motor's drivers and GRBL code that were intended for the MTM Snap. Unfortunately I was out of the country already and could only help with opinion and 3D modelling. After much hard work from my classmates, the machine could not function as intended. My classmate Paul Giron has documented this in his own website.
Below there's pictures of the 3D model done at Rhino, downloadable here.