For this week’s group assignment, I needed to measure the power consumption of a device.
I chose the motor for this assignment. Of course, I have previously done this measurement
when I wanted to choose a suitable driver for the motor. I connected the motor
to a power supply (9V) and measured its DC current consumption. Then,
I chose a driver IC that had an output current suitable to my motor’s consumption.
However, since I did not record it to report it, I redid the measurement.
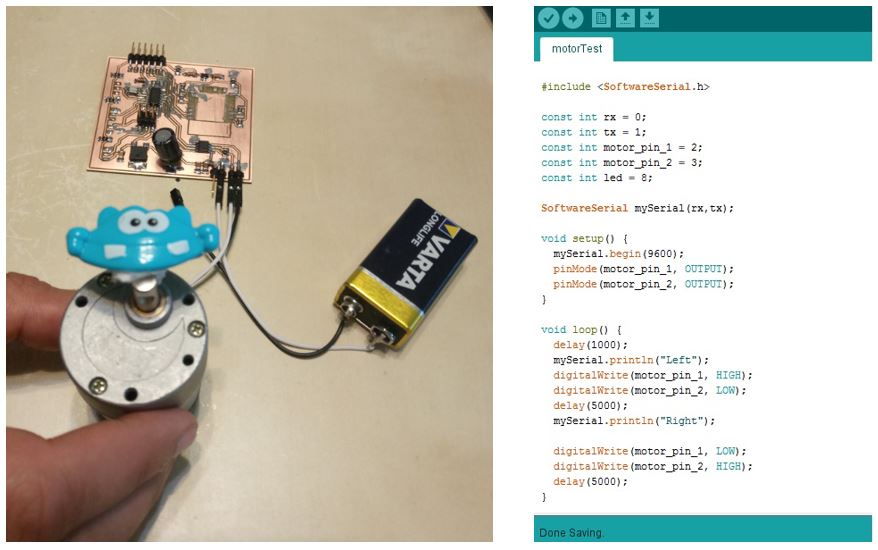
I used a multi-meter in current measuring mode series with my motor
and running the same test code above,
I measured the current consumption, which is around 90mA at a 9V bias voltage.
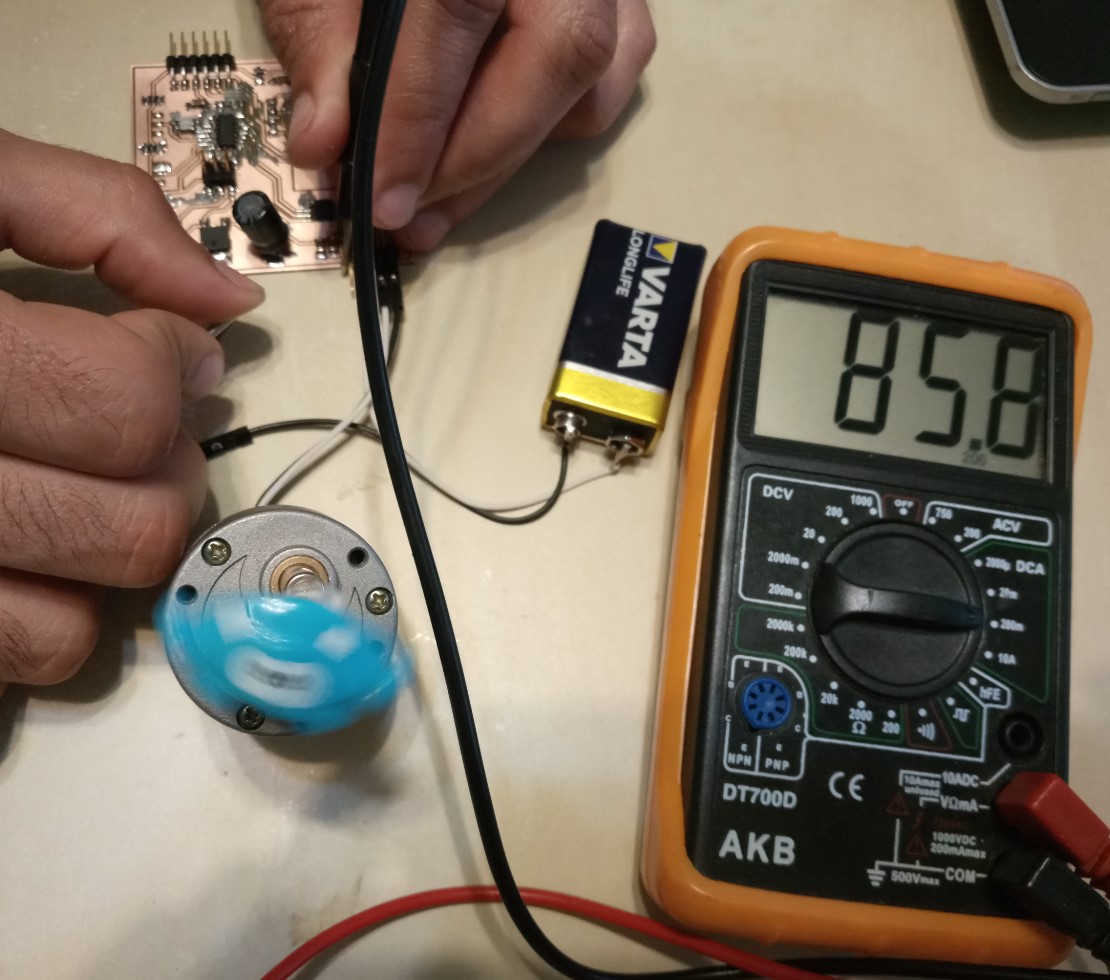 Figure 6.
Figure 6. Measuring the current consumption of motor with a multi-meter.
As mentioned above, the code changed the direction of the motor rotation
every five seconds. Although the motor has a DC current consumption,
during the transitions, since the rotation needs to be stopped
and restarted in the reverse direction,
there is a momentary higher consumption that can be seen even with the multi-meter.