Wk15. Mechanical Design
Group assignment: Design a machine (mechanism+automation), including the end effector build the passive parts and operate it manually document the group project and your individual contribution.
The MadMax Multi-Axis
For this assignment we decided to create a MadMax Multi-Axis Machine, a linear axis machine based on a chamfer rail, rack and pinion mechanism. My group members were Esteban Gimenez, Julia Leirado and Marc Conagla. Here is the link to our machine webpage which describes our design, process and fabrication stages of the final machine.
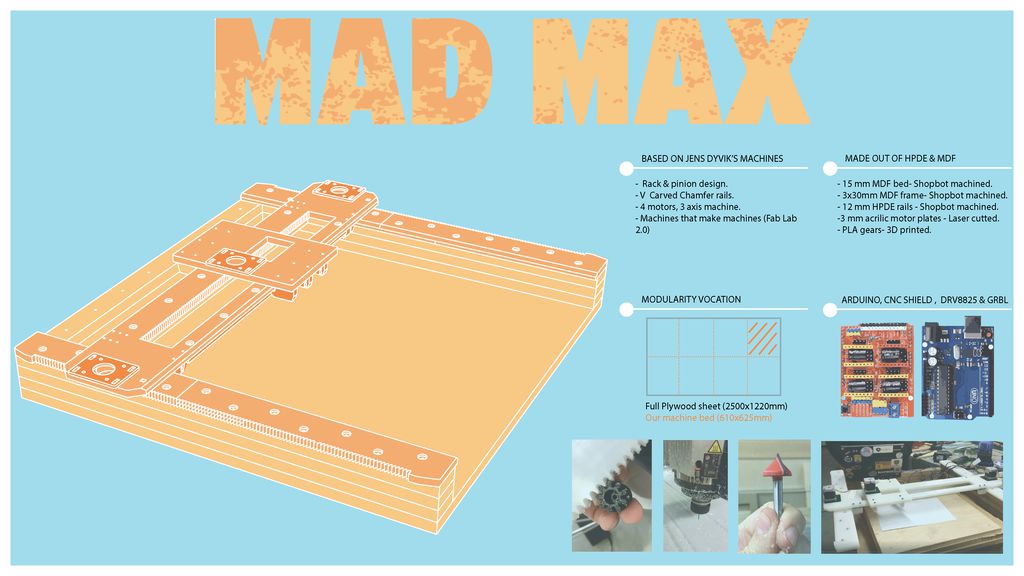
From the beginning we were interested in replicating Jens Dyvik’s fabricatable machines concepts including our very own modular design for the rack and pinion rail movement so that in theory the machine could be scaled depending on the size of material. Our Mad Max was mostly inspired by the award plotter machine.
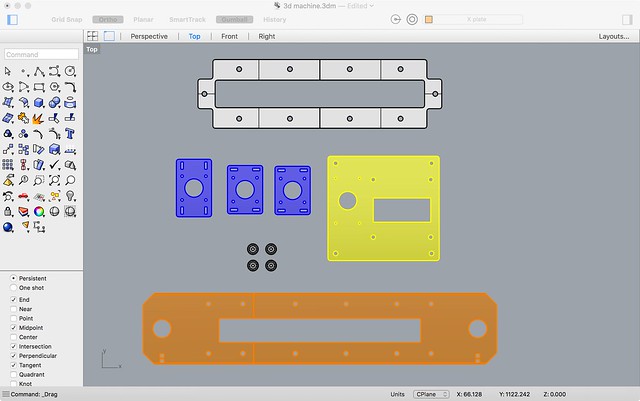
Planning and Design
We used Github to plan this project, keep up with documentation and organise tasks. The first week, I tested various materials and techniques for a first prototype. For this I made various gear tolerances tests for the rack and pinion mechanisms (see below) primarily with the laser using thin 5mm plywood. Here are the initial designs:
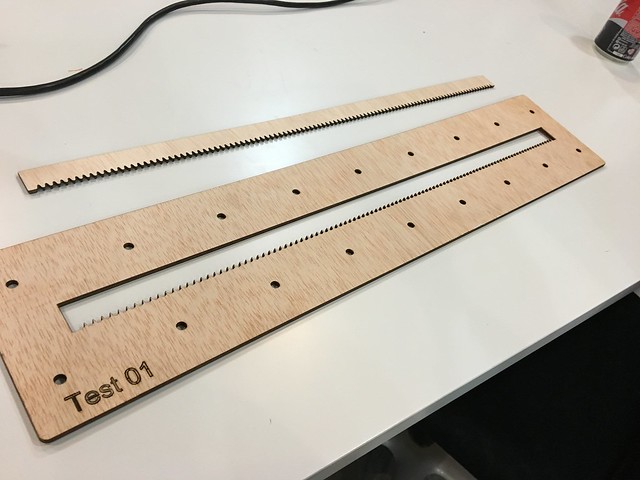
Testing tolerances
Here are the initial plywood cuts I made. Initially we tried 3D printing the gear hubs for the stepper motors but we were not satisfied with the finished quality and structural integrity of the PLA. Finally we settled on using some acrylic off-cuts that we scavenged from the lab. This turned out to be much more more solid material for the gears.
The process of designing the machine involved understanding the the various materials and mechanisms we had available and how to rapid prototype a 3 axis machine with modular rails. My main task was helping figure out the gear tolerances and trying out various materials before settling on the acrylic. I also was in charge of setting up the group webpage and documenting our progress. Please refer to this for further details.
You can download all my initial CAD designs and cut files for week 15 from my Gitlab repository.