Week 18: Applications and Implications / Project Management¶
Linked mechanism¶
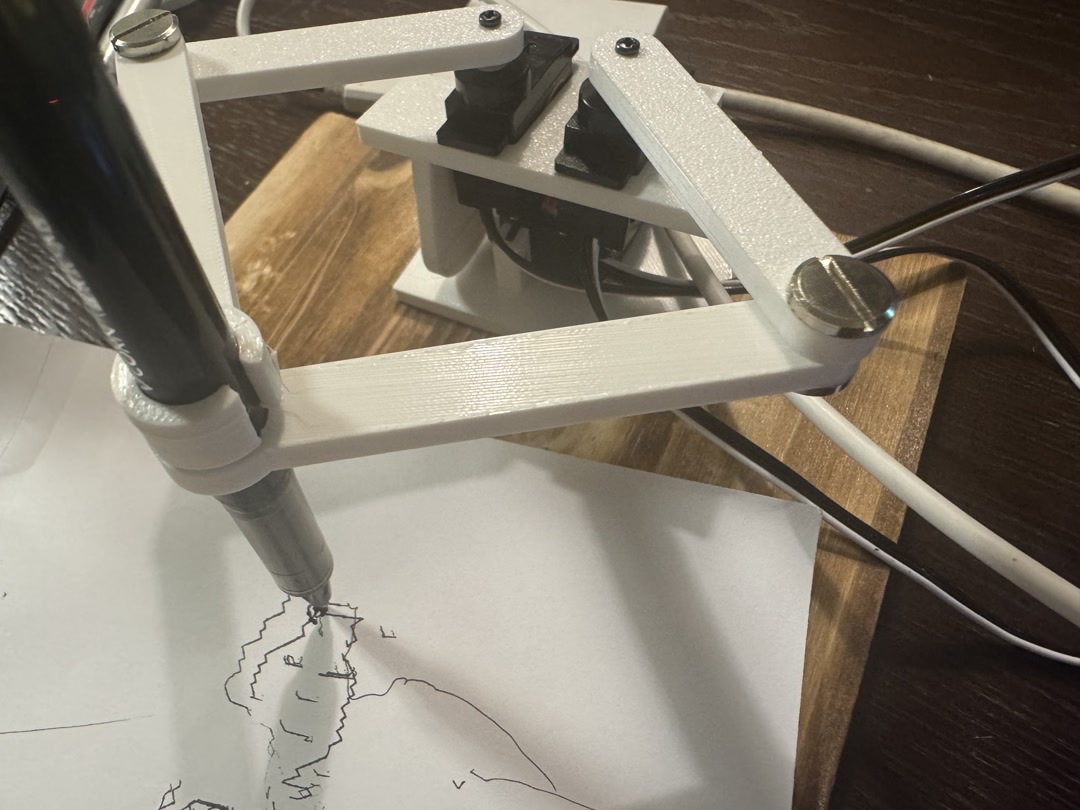 Linked mechanism drawing a portrait
Linked mechanism drawing a portrait
Assignment¶
Application and Implication¶
- Plan a final project masterpiece that integrates the range of units covered, answering:
- What will it do?
- Who has done what beforehand?
- What sources will you use?
- What will you design?
- What materials and components will be used?
- Where will they come from?
- How much will they cost?
- What parts and systems will be made?
- What processes will be used?
- What questions need to be answered?
- How will it be evaluated?
- Your project should incorporate
- 2D and 3D design,
- additive and subtractive fabrication processes,
- electronics design and production,
- embedded microcontroller design,
- interfacing,
- programming,
- system integration and packaging
- Where possible, you should make rather than buy the parts of your project
- Projects can be separate or joint, but they need to show individual mastery of the skills and be independently operable
Project Management¶
- Prepare drafts of your final project summary slide (presentation.png, 1920x1080) and video clip (presentation.mp4, 1080p HTML5, < ~1 minute, < ~25 MB), put them in your root directory, and check that they are linked in the final presentation schedule
1. Plan a final project masterpiece that integrates the range of units covered, answering:¶
What will it do?¶
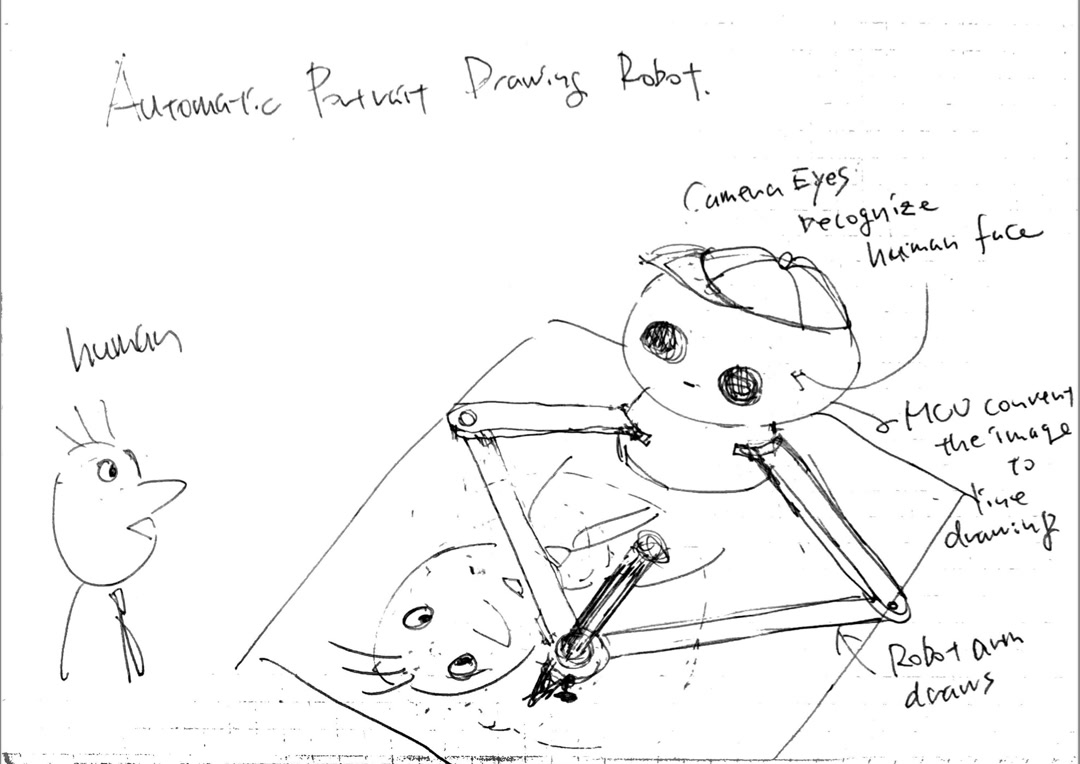
It is a portrait drawing robot. It is a robot that has a camera eye that can recognize human faces, a brain that converts the image into a line drawing, and hands that draw the image.
Who has done what beforehand?¶
There are a lot of SCARA-arm drawing robot examples, but I don’t see many that combine them with portrait drawing mechanisms.
Reference SCARA draw bot projects
- Fab Academy 2019 SCARA Drawbot
- Drawbot
- BrachioGraph
- CNC Drawing Arm
- CNC Dual Arm Plotter
- Parallel arm 2D plotter
- SCARA plotter
- Parallel SCARA plotter
- Parallel SCARA plotter
- M5 Plotter Robot
What sources will you use?¶
- Study the above examples, and ask ChatGPT about implementation ideas
- Seeed Wiki, including ESP-DL, the deep-learning framework that works on the edge with a pre-built face recognition model
- SCS0009 servo, FE-URT-1 board, and their manuals
What will you design?¶
- Software application for the portrait drawing pipeline
- camera
- Streaming on TFT LCD
- Switch to freeze a photo frame
- Face recognition from a photo
- Eye landmarks detection
- Edge extraction of the photo, with emphasis on the eyes
- Converting the edge image to a series of paths on an xy plane
- Conversion of the paths to servo angles for the right and left shoulders, and pen-up/pen-down motion
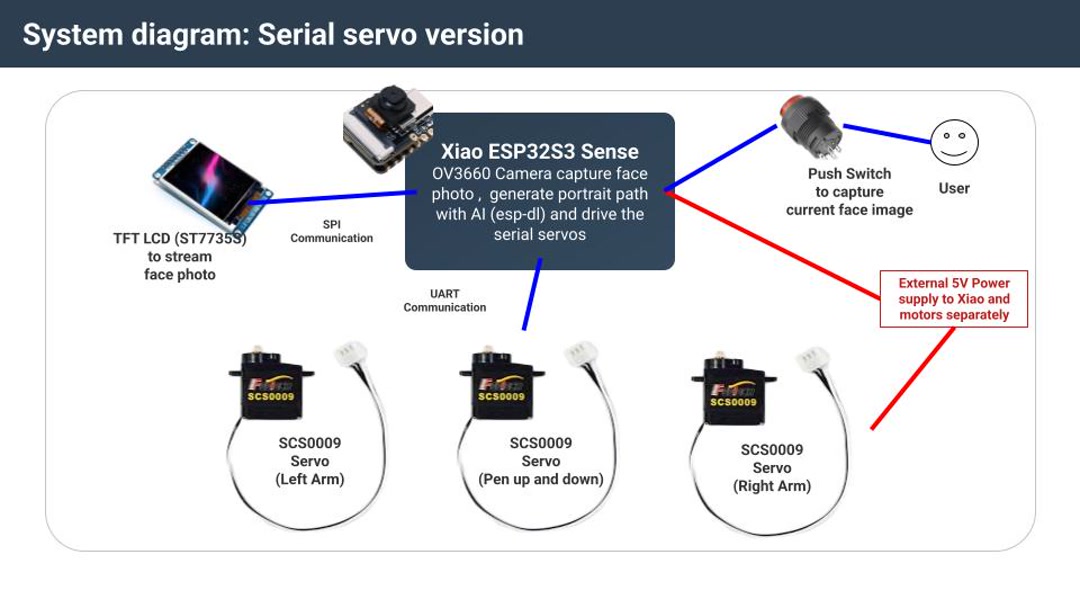
- Electronic circuit
- Connect Xiao, TFT, and 3 serial servos
- Recreate and incorporate part of the FE-URT-1 dev board
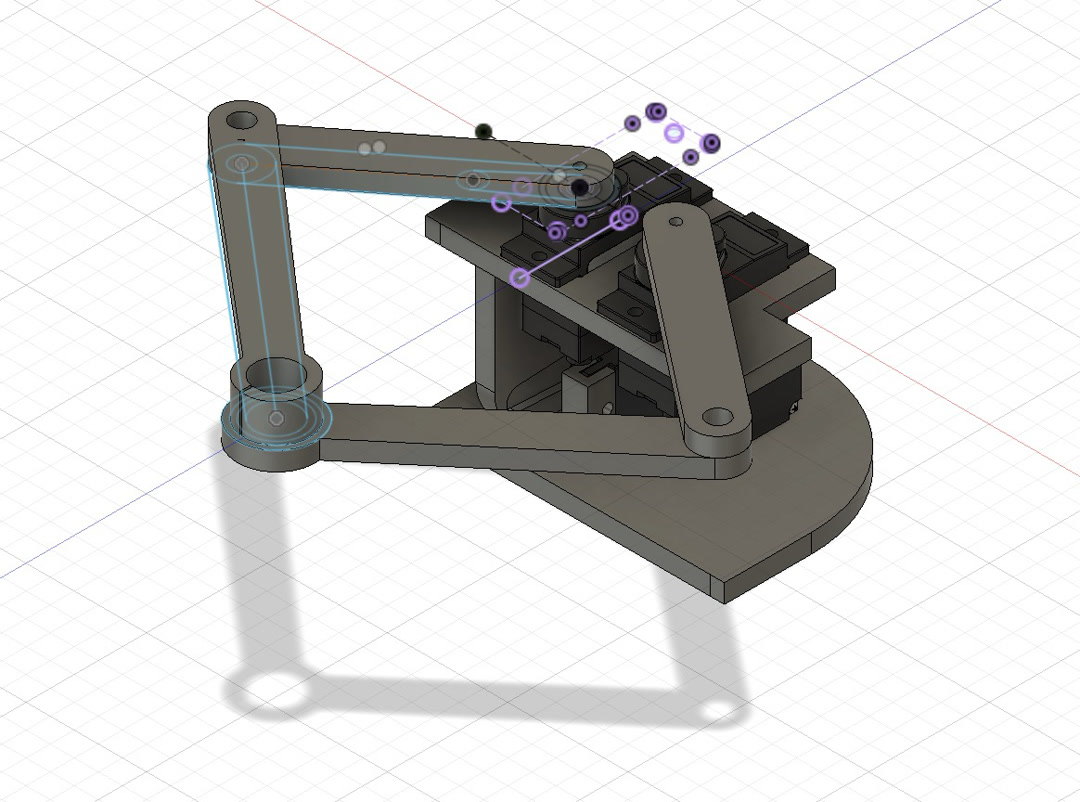
- Mechanism
- 5-bar linked mechanism
- Pen-up/pen-down mechanism
- Enclosure of the electronic parts
What materials and components will be used?¶
- PETG/PLA 3D prints for the 5-bar mechanism and robot head parts
- Electronic parts
- My original PCB board that incorporates the parts below
- Seeed Studio Xiao ESP32S3 Sense
- 1.8-inch SPI full-color TFT LCD
- Button switch
- 3 SCS0009 servos
- 6V adapter
- DC-DC converter from 6V to 5V
- Schottky barrier diode
- FE-URT-1 dev board or DIY version
- PNP transistor
- 2 x tri-state buffers
- Wooden board to secure paper
- Pen and paper
Where will they come from?¶
- FabLab Kannai inventory
- Local electronics shop Akizuki
- Amazon Japan
- AliExpress
- DigiKey Japan
How much will they cost?¶
The following is a draft BOM for one complete robot. The custom PCB replaces the FE-URT-1 board in the final assembly; an FE-URT-1 can still be used during prototyping and debugging.
| Category | Item / specification | Qty. | Made or bought | Source | Est. unit cost | Est. subtotal |
|---|---|---|---|---|---|---|
| Controller | Seeed Studio XIAO ESP32S3 Sense | 1 | Bought | Akizuki | ¥2,660 | ¥2,660 |
| Camera | OV3660 camera module with 75 mm cable (120°) | 1 | Bought | AliExpress | ¥1,273 | ¥1,273 |
| Display | 1.8-inch SPI TFT LCD, ST7735S | 1 | Bought | Amazon Japan | ¥899 | ¥899 |
| User input | Momentary push button | 1 | Bought | Akizuki | ¥90 | ¥90 |
| Actuators | FeeTech SCS0009 serial bus servo | 3 | Bought | Akizuki | ¥1,680 | ¥5,040 |
| Power | Regulated 5V3A DC adapter | 1 | Bought | Akizuki | ¥1,100 | ¥1,100 |
| Electronics | Copper-clad PCB board | 1 | Made | Yodobashi | ¥469 | ¥469 |
| Electronics | Schottky Diode | 1 | Assembled | Akizuki | ¥10 | ¥10 |
| Electronics | Condensers 470μF | 3 | Assembled | Akizuki | ¥10 | ¥30 |
| Electronics | Condensers 0.1μF | 3 | Assembled | Akizuki | ¥25 | ¥75 |
| Electronics | 0Ω jumper resistors | 3 | Assembled | Akizuki | ¥1 | ¥3 |
| Electronics | Pin socket | 1 set | Assembled | Akizuki | ¥80 | ¥80 |
| Electronics | Pin header | 1 set | Assembled | Akizuki | ¥35 | ¥35 |
| Electronics | wires | 1 set | Assembled | Amazon | ¥570 | ¥570 |
| Electronics | Terminal Block (5mm) | 1 set | Assembled | Akizuki | ¥20 | ¥20 |
| Electronics | heat-shrink tubing | 1 set | Assembled | Akizuki | ¥40 | ¥40 |
| Mechanism and enclosure | PETG filament for the links, pen lift, body and head | Approx. 300 g | Made | Amazon | ¥2,565 | ¥800 |
| Hardware | Chicago Screws for linkage | 1 set | Bought | Amazon Japan | ¥1,627 | ¥1,627 |
| Drawing surface | Wooden base board | 3 | Cut/engraved | Local dollar shop “Seria” | ¥110 | ¥330 |
| Consumables | Pen | 1 | Bought | Local stationery shop | ¥100 | ¥100 |
| Consumables | Drawing paper | 1 pack | Bought | Local stationery shop | ¥100 | ¥100 |
| Development tool (not installed in the final robot) | FEETECH FE-URT-1 servo interface board | 1 | Bought | Akizuki | ¥1,660 | ¥1,660 |
| Development power supply (not installed in the final robot) | Regulated 6 V, 2.8 A DC adapter for the FE-URT-1 development setup | 1 | Bought | Akizuki | ¥1,100 | ¥1,100 |
| Final robot total | ¥15,351 | |||||
| Total including development tools | ¥18,111 |
The FE-URT-1 and its 6 V, 2.8 A adapter are used only to configure, test, and debug the serial servos; they are not installed in the final robot. The estimates exclude shipping and failed prototype parts.
What parts and systems will be made?¶
- Milled PCB
- portrait drawing pipeline software
- 5-bar link mechanism
What processes will be used?¶
- additive fabrication process - 3D printing of the robot body
- subtractive fabrication process - Laser engraving of the wooden board
- Electronics design and production
- Programming
- Systems integration
What questions need to be answered?¶
- Is there an OV3660 camera with a long cable that works with Xiao ESP32S3?
- If it is not available in time, can I design a board that directly becomes the face of the robot?
- ❌ Does the SCS0009 servo move with only 5V input from Xiao?
- ❌ Does the FE-URT-1 dev board for SCS0009 work with only 5V input from Xiao?
- Can I design and mill a serial signal converter board that can be an alternative to FE-URT-1?
- Or is giving 6V to the servo and connecting it with Xiao’s TX enough to move the servos?
- How can I improve the drawing quality of a 5-bar linked SCARA robot?
How will it be evaluated?¶
- Cuteness of the robot
- Quality of the portrait drawing
Reflections¶
- Time is limited, and I have to focus on my final project....
Checklist¶
- [X] What will it do?
- [X] Who has done what beforehand?
- [X] What sources will you use?
- [X] What will you design?
- [X] What materials and components will be used?
- [X] Where will they come from?
- [X] How much will they cost?
- [X] What parts and systems will be made?
- [X] What processes will be used?
- [X] What questions need to be answered?
- [X] How will it be evaluated?
- [X] Uploaded summary slide (placeholder)
- [X] Uploaded video clip (placeholder)
- [X] Checked they are linked in the final presentation schedule
AI Usage¶
- I used Codex for grammar checking, and made the final review.
Sources¶
- References are in the above “Who has done what beforehand?” section.