Final Project — Portable Ground Control Station (GCS)¶
Final Project Concept¶
The Portable Ground Control Station (GCS) is a compact field-deployable control platform designed for UAV operations.
The system integrates a display, onboard computer, communication modules, battery system, controller interface, and custom power management electronics into a single rugged enclosure.
Project Overview¶
My final project is a Portable Ground Control Station (GCS) designed for UAV field operations.
The objective is to create a compact field-ready station that can be deployed quickly for mission planning, telemetry monitoring, video reception, and UAV control.
The project combines skills learned throughout Fab Academy, including CAD design, electronics design, embedded programming, digital fabrication, and system integration.
Project Goals¶
- Create a field-deployable UAV control station
- Integrate all critical hardware into one enclosure
- Design a custom power management system
- Provide battery-powered operation
- Support telemetry and communication equipment
- Simplify deployment during UAV missions
Project Evolution¶
At the beginning of Fab Academy, my original final project idea was an Autonomous Drone Station.
The purpose of the station was to provide automatic landing, automatic takeoff, battery charging, and drone protection while parked.
Several concepts were designed and modeled in Fusion 360. However, this project required significant additional work related to landing accuracy, weather protection, charging mechanisms, and long-term field testing.
Because of this, I decided to focus on a more practical project that directly supports my UAV activities and can be completed during Fab Academy.
The final selected project became a Portable Ground Control Station (GCS).
Initial Project Concept — Autonomous Drone Station¶
Concept 1 — Open Landing Platform¶
The first concept uses an elevated landing platform.
The design focuses on easy vertical takeoff, safe landing, internal electronics space, and an integrated charging system.
The raised structure improves clearance around the drone while providing space underneath for power electronics and charging hardware.
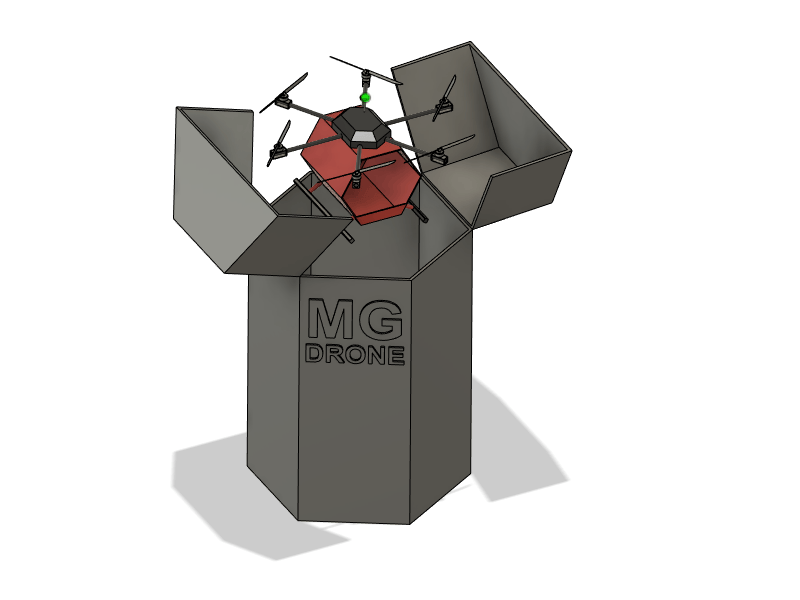
Concept 2 — Enclosed Drone Station¶
The second concept focuses on protecting the drone while it is not in operation.
The enclosure opens before takeoff and landing and closes afterward to protect the aircraft.
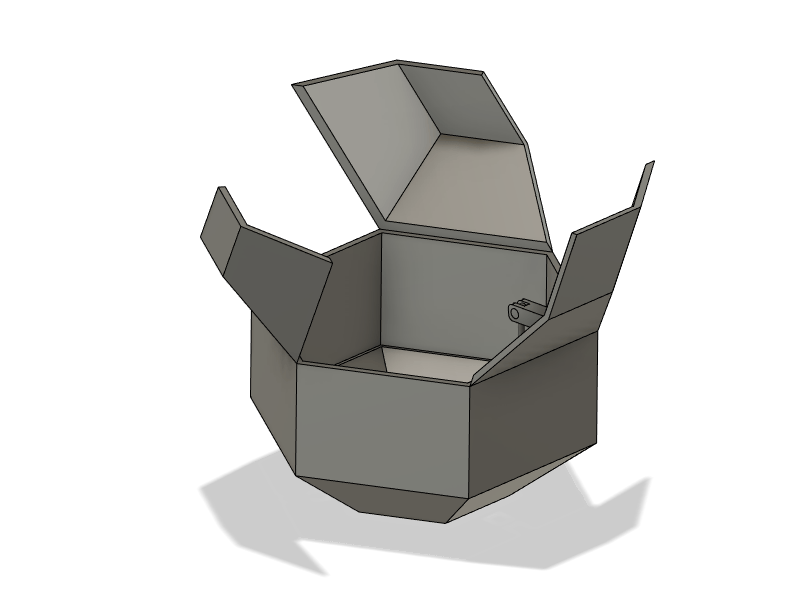
Advantages of this concept:
- Better environmental protection
- Compact footprint
- Improved safety
- Reduced exposure to dust and rain
Final Selected Project — Portable Ground Control Station¶
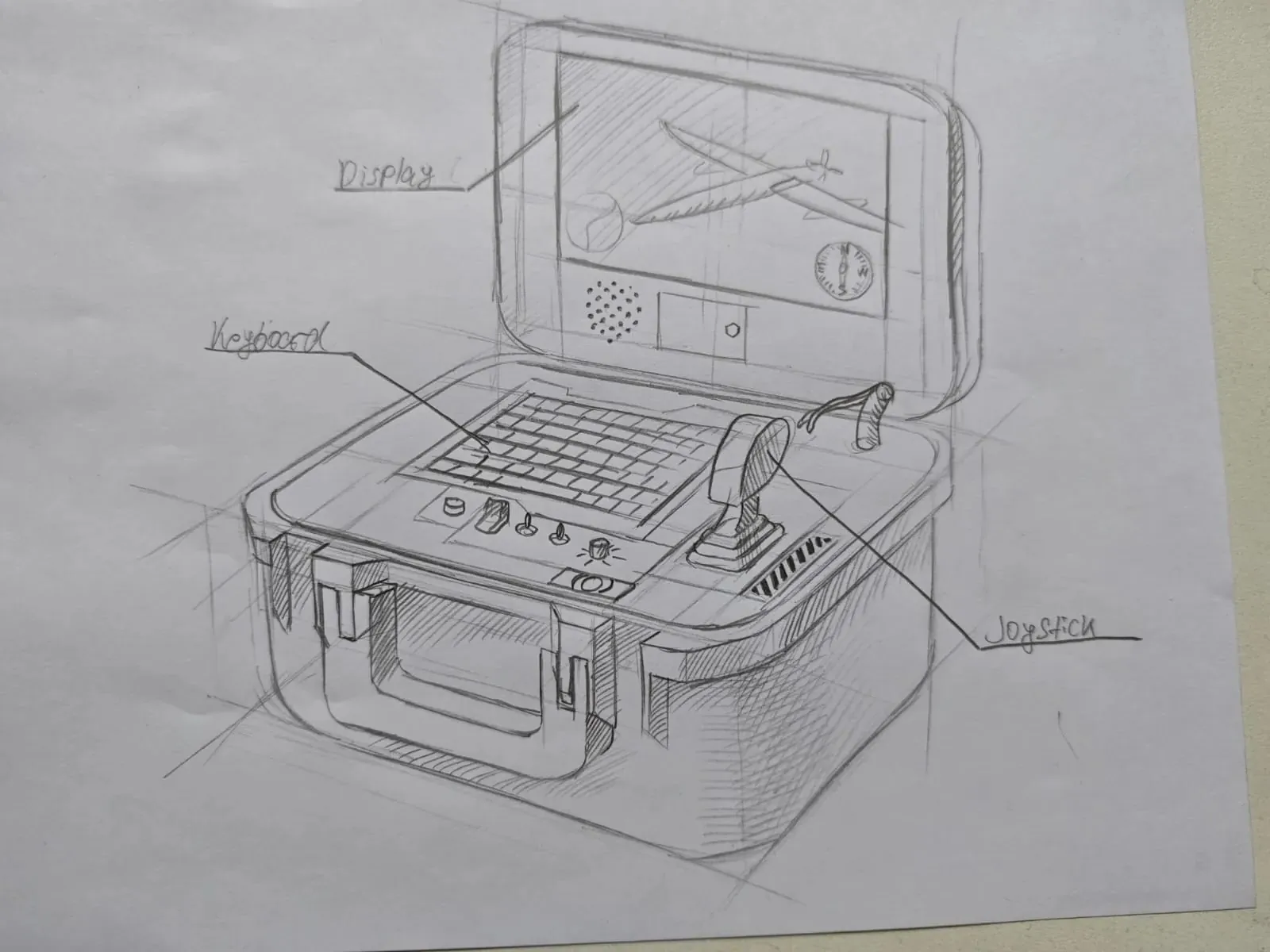
Physical Layout Validation¶
To verify the GCS concept, I tested the main components using the actual enclosure.
This step allowed me to estimate available space and evaluate component placement before beginning detailed CAD design.
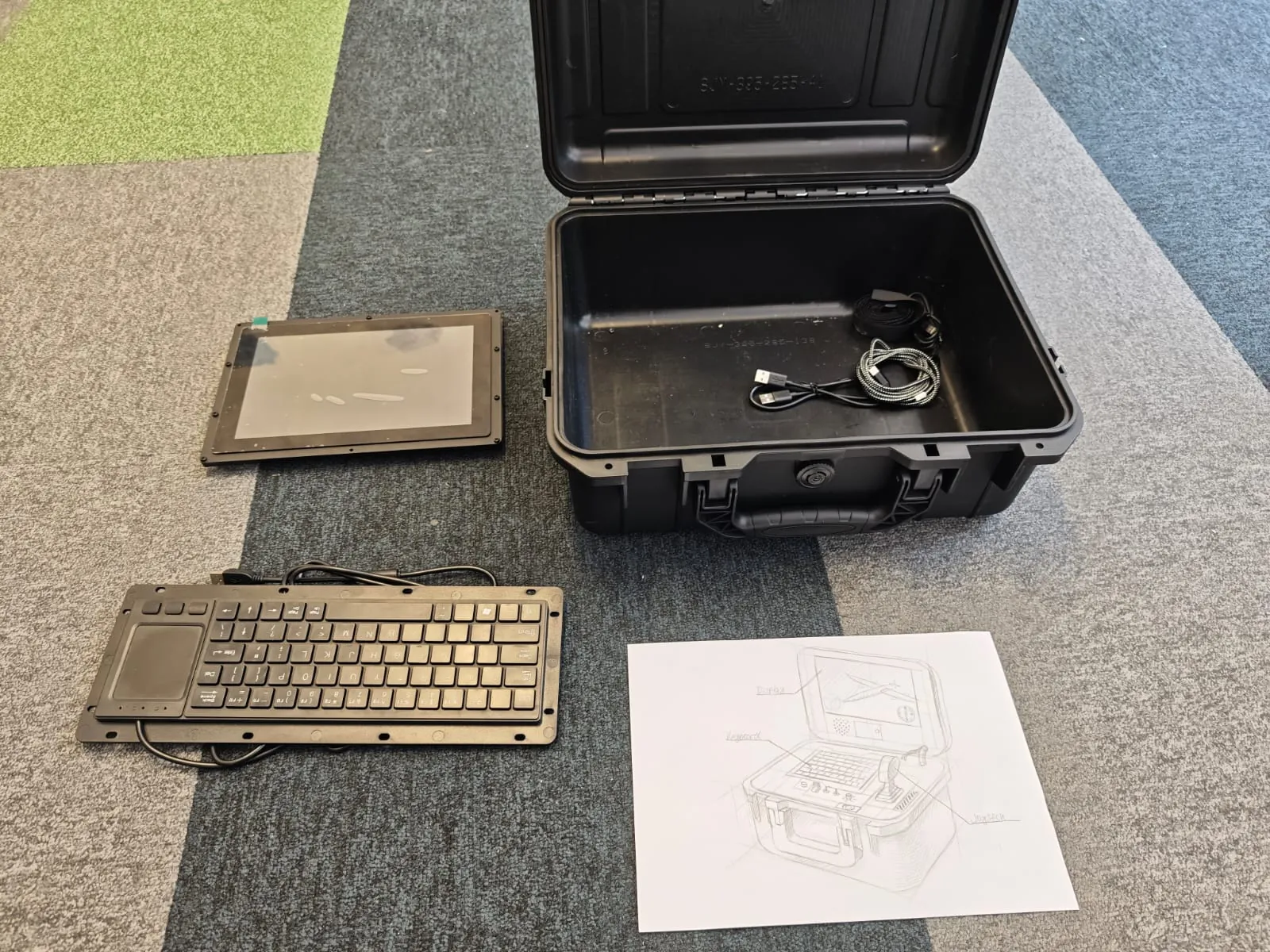
Main components visible:
- Rugged protective case
- 10.1 inch display
- Keyboard with touchpad
- Internal mounting area
System Architecture¶
The Portable GCS consists of several integrated subsystems.
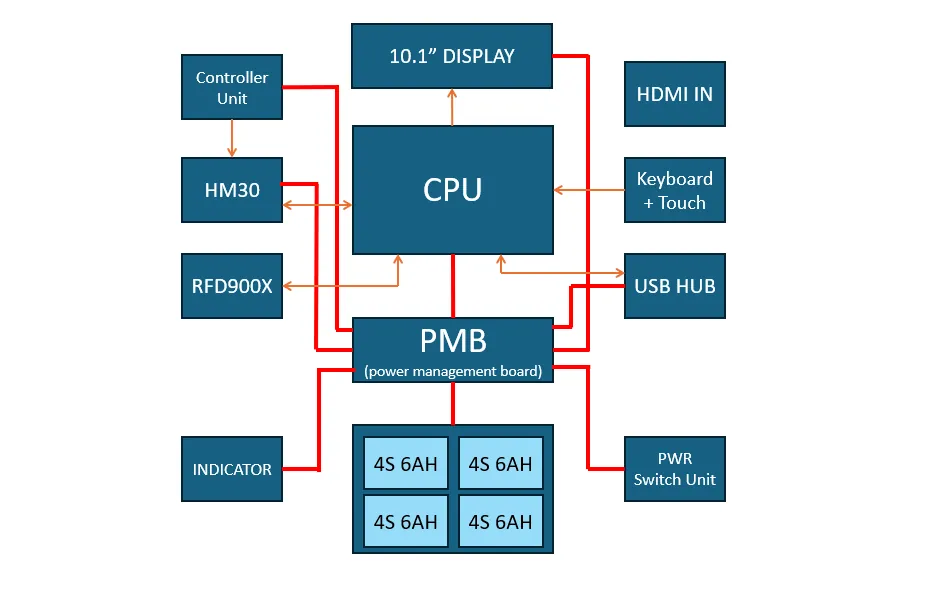
The architecture is centered around a custom Power Management Board (PMB) that distributes power throughout the system.
Main Components¶
| Component | Purpose |
|---|---|
| 10.1 inch Display | Main user interface |
| CPU | Runs operating system and GCS software |
| Keyboard + Touchpad | User input |
| HDMI Input | External video input |
| USB Hub | Peripheral connectivity |
| HM30 | Communication module |
| RFD900X | Telemetry radio |
| Controller Unit | Flight control interface |
| PMB | Power management and monitoring |
| Battery Pack | Portable power source |
| Indicator System | System status indication |
| Power Switch Unit | Main system control |