Final Project¶
Project proposals¶
There are, in fact, two projects I am considering.
1. Chappe’s Telegraph.¶
Introduction¶
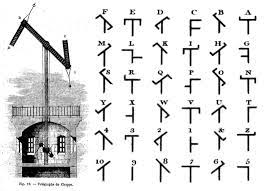
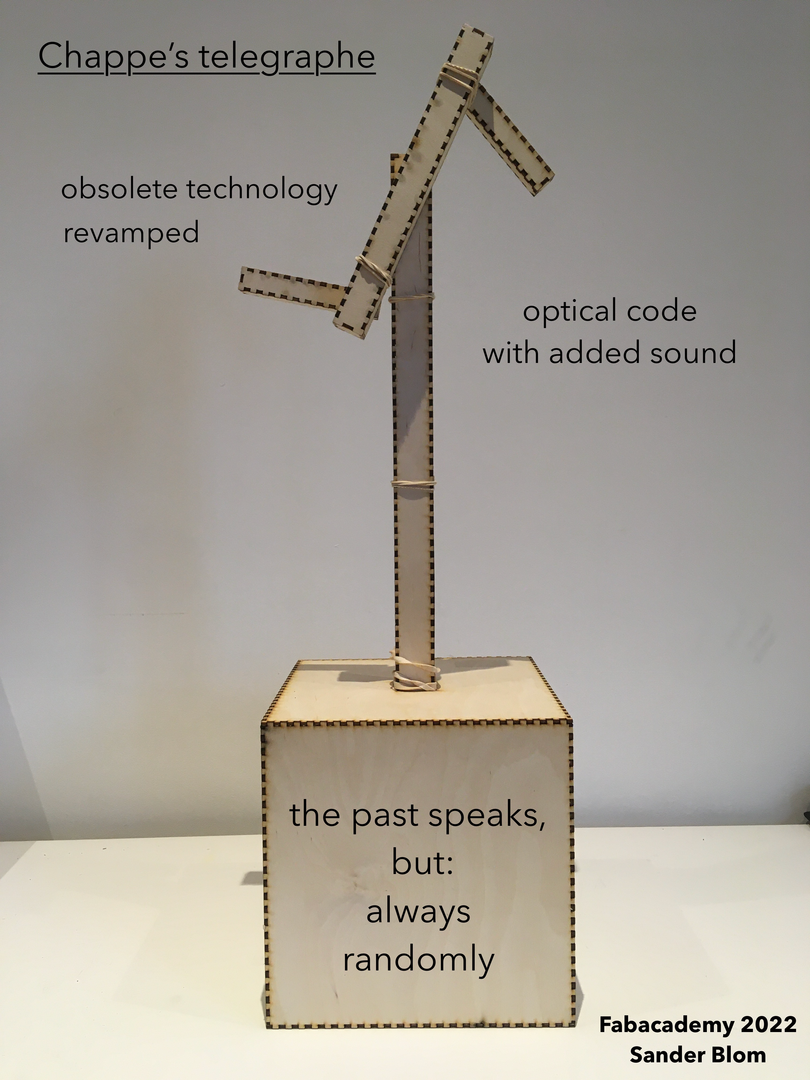
From the late 18th until mid 19th century in France and some of the countries ruled by it, a semaphore called Télégraphe de Chappe was in use. On (church-)towers some 20 km apart a rig with two movable arms was placed. By moving these into a particular position, messages could be sent to the watchful crew over on the next tower, and so on.
A symbol sent from Paris to Lille for example -250 km- would take 2 minutes to arrive this way; breakneck speed at the time.
To maximize the efficiency, a classified book of codes was issued, so whole words and topographical names instead of single letters could be conveyed. This line of communication was exclusively for matters of state.
![]()
Concept¶
History, and ways of recreating what was lost to time, have always fascinated me.
Chappe’s telegraph is long gone, its once revolutionary innovation rendered obsolete by the electrical telegraph and its offshoots.
I do find beauty in this relay system, and I’d like to try and bring it back to life, with modern components.
Practical¶
The randomness of history demonstrated
I want to build a programmable, single speaking Telegraph. Feeding it with a list of words from the original codebook (from ‘admirable‘ via ‘projectile‘ to ‘Vive la République’), I want to connect the arms to this database, and to a speaker saying the words out loud. An option is to randomize the control of the arms, effectively turning it into a military poetry machine. I am not sure about that last bit though. It would be nice to discover a truly practical contemporary use for my machine along the way.
EDIT 22-02-22: During the regional review a while ago Quentin (?) asked me why not to make two (or more) semaphores, so they could speak to eachother. I found the idea of one single one, being the last in line, the only one speaking out loud the words that make up the message, to be more poetic (and quite possibly much less complicated then devising a two-way communication system.) A demonstration of the wheels of time.
Update
Issues I need to solve. 1. How to build a mechanical device that can be stabilized in different postions? (Which material? Does it involve cogwheels e.g.?)
-
How to feed these mechanical positions into a PCB?
-
How to translate that data to an outputdevice?
-
Select an outputdevice.
-
Somehow somewhere get a randomizer in the system.
Update
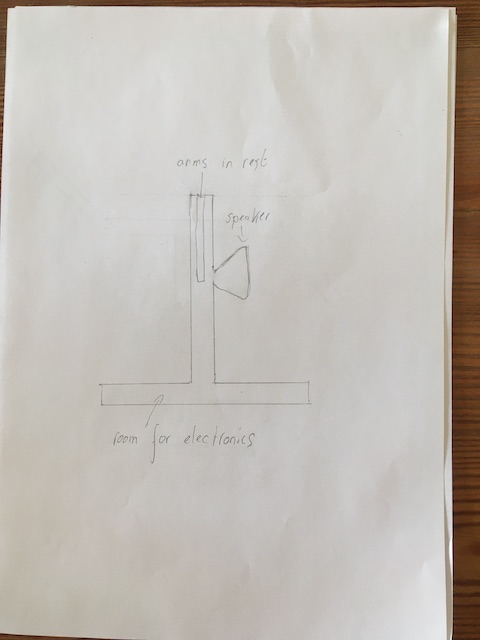
Prototype cardboard (sweep)

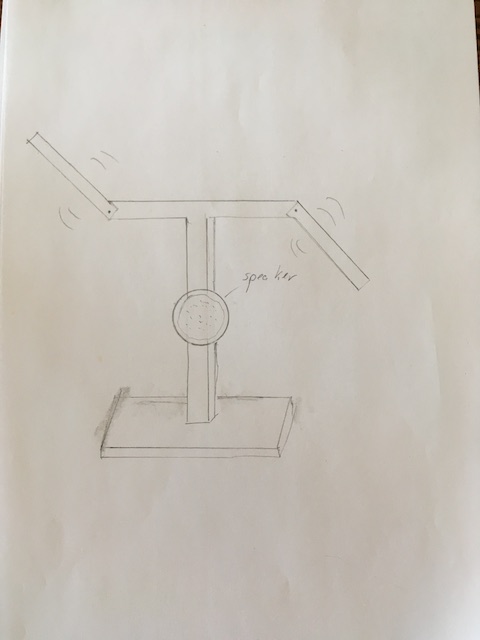
Model in wood

Prototype wood (randomized)

edit june
“Complete your final project, tracking your progress: -what tasks have been completed, and -what tasks remain? -what’s working? what’s not? -what questions need to be resolved? -what will happen when? -what have you learned?“
ambassadeurbohémienneperdresuperposer
-I designed and built a framework
-I got my object moving, and programmed it
-I programmed a microcontroller so my device speaks random words from the original catalogue
But the integration of all these elements failed.
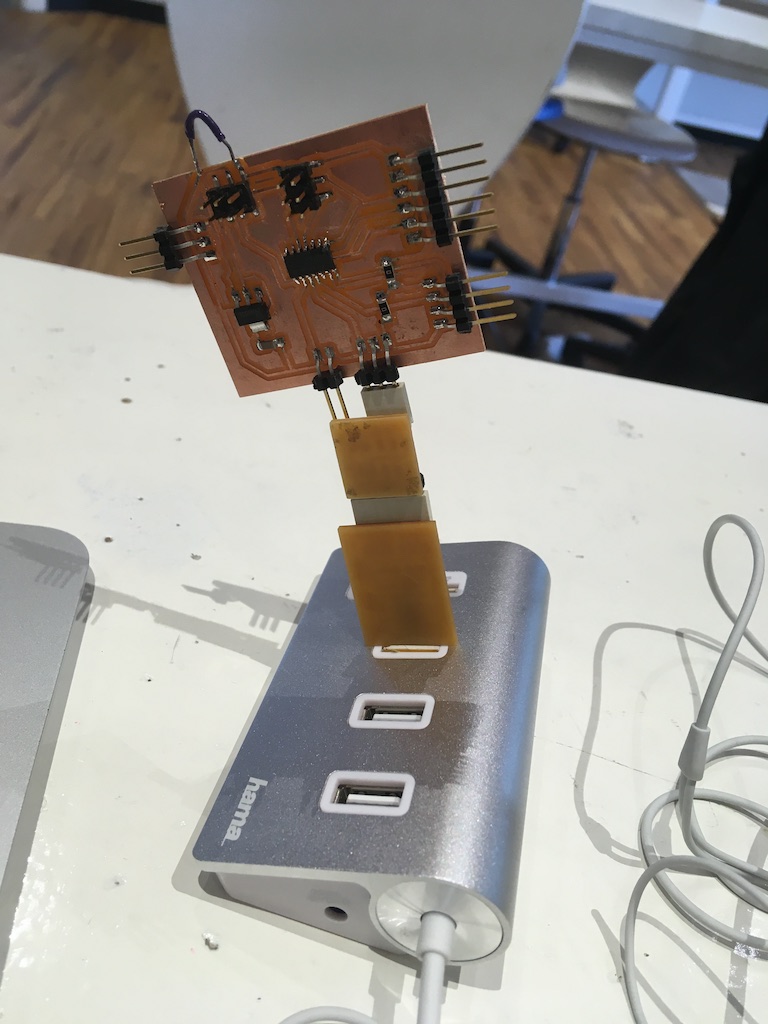
Framework
The framework I built is nice enough, it is nearly pressfit, and the look somehow suits the story. I designed it all based on the size of the servos I planned to use, and that turned out to be a flaw. The whole structure is topheavy, and the axis of the servo does a fine job driving movement, but holding up a construction: it is not meant for that. A solution to that issue could be finding a different kind of servo, and consequently redesign the entire structure.
Programmed movement
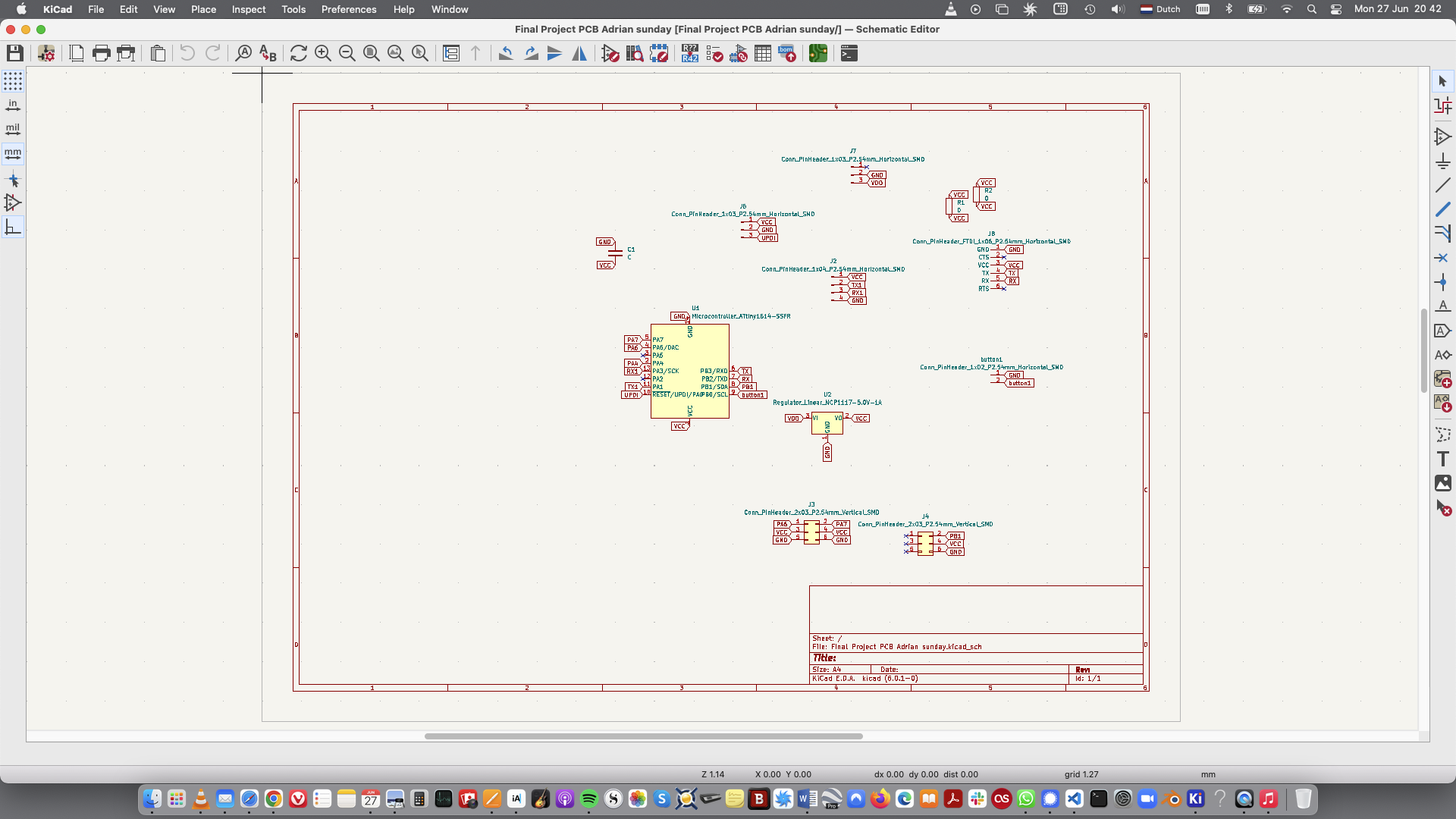
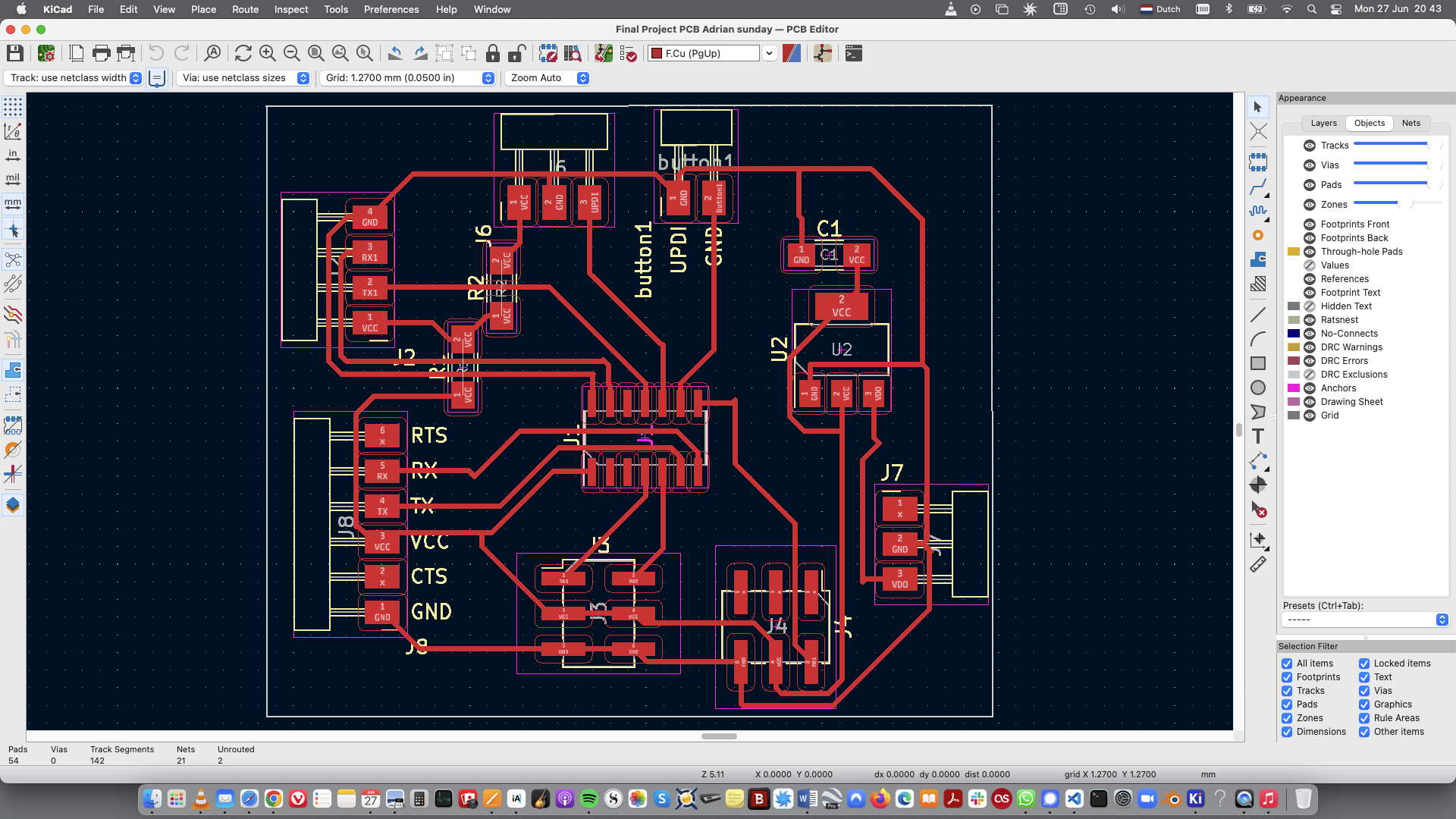
I produced my own board, to power three servos.
And I found a programme to run it.
And I honestly do not remember why I did not use it - in the sprint some evidence got lost. It was very hard to get a good design, and once I soldered it one of my traces got ruined. I bypassed.
In the final stages I was able to -via two Arduinos- programme all three servos into randomized movement. What I did not get to, is use my own board for this, and I guess I also could have used only one Arduino (when failing to make my board). I guess I panicked, and went for the most secure way. Another thing I did not get to is programme the movement in a way that is not fully random, but switching between a certain number of fixed ‘coded’ positions. An operator from the old days would see a lot of ‘ungrammatical’ signs in the way my semaphore moves at present.
Speaking
Yes, my friend Olivier Delebecque delivered and spoke a very nice random selection from the
Vocabulaire de composition du vicomte de Vougy (second empire). And I was able to connect my 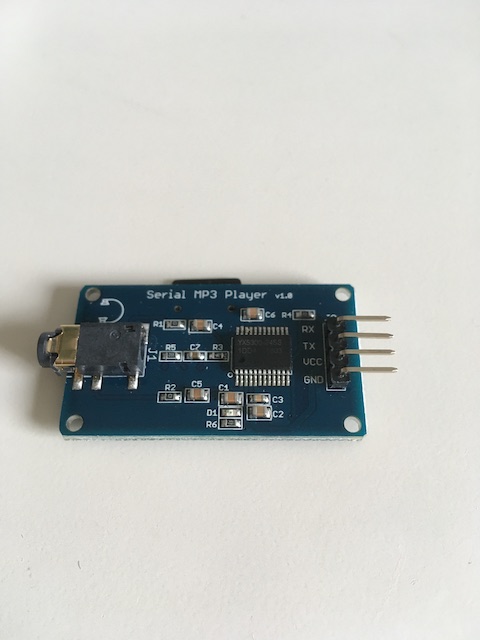 player to a small speaker, and actually programme it and make it speak, aided by pages like
Help
More help,
but above all from my tutor Henk.
player to a small speaker, and actually programme it and make it speak, aided by pages like
Help
More help,
but above all from my tutor Henk.
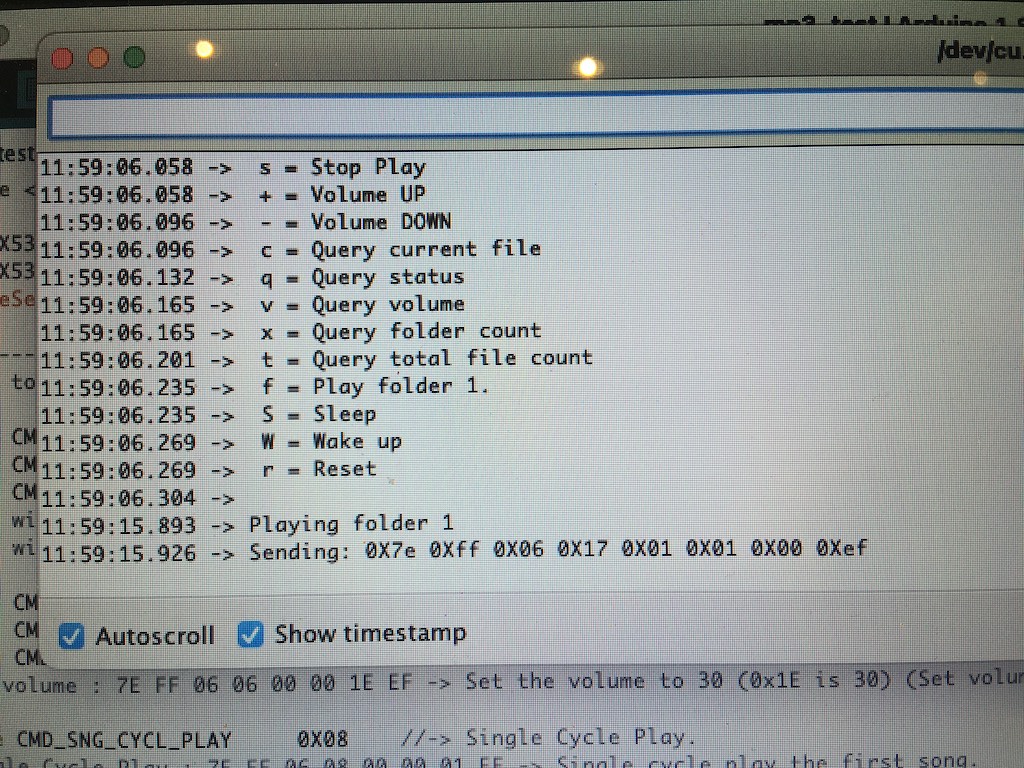
I did not document very well what happend there, but the format of my MP3 files needed a lot of tweaking before it was suitable for playback in this manner. And when we finally did get audio, the Catalex got so hot it burnt your fingers. The window of opportunity to debug and fix that and integrate it into the topheavy system closed straight after.
Packaging
Once I had tested the servos and the mechanics of the semaphore (and abandoned the idea of having it move and speak integrally) I needed longer wires to attach servo to microcontroller (Arduino). I asked Benjamin for advice, since I could not find a definitive answer to how to ‘rewire’ a servo - maybe I was looking for the wrong strategy. Anyway, we cut the connectors off, and spent a long time figuring out how to work the connectors.

There, somehow, something did not click, and so Ben invited me over to fix things in his place - the crimpingtools we needed were available there.
So we took longer cables, connected them, and back at de Waag I finally got it to work.

Below is my presentation, in which it all comes together.

What I learned
On the level or ‘spiral’ of this machine I learned to be humble. My design looked quite simple, super easy even comparing it to what others were aiming for. But I found out -also in this corner of my life- that the unexpected can and will happen, and the seemingly easy might prove to be super complicated. The opposite also happens, but much less often. Partly due to lack of experience and knowledge; I never had to think about the ‘load’ of a servo before, etc. On a different level I was surprised how sometimes I simply could not envision a shape, construction or consequence - eventhough I ‘ve seen’envisioning’ as the core business for most of my professional life. I look at the world in slightly different terms now - cause and effect got a different meaning. I learned I have some endurance. I learned how important it is to be consistent - in this world, the one I greeted as an outsider to Techno Land at the landing page - which is, ultimately, everybody’s world. I learned I can still learn something.
files
codemp3 codemovement design1 design2 design3 design4 design5