15. Mechanical design¶
This assignment should be done by “Group”, so the all our works were described here. In this individual web page, I only wrote short summary of my contributions.
Individual contribution¶
For this assignment, I designed and created 3-DOF manipulator moving by servo motors and mechanical robotic hand.
Draft sketch¶
1. Mechanical gripper¶
First, we sketched the mechanism to apply to our mechanical hand. We would like to build a basic style of a mechanical hand shown below.
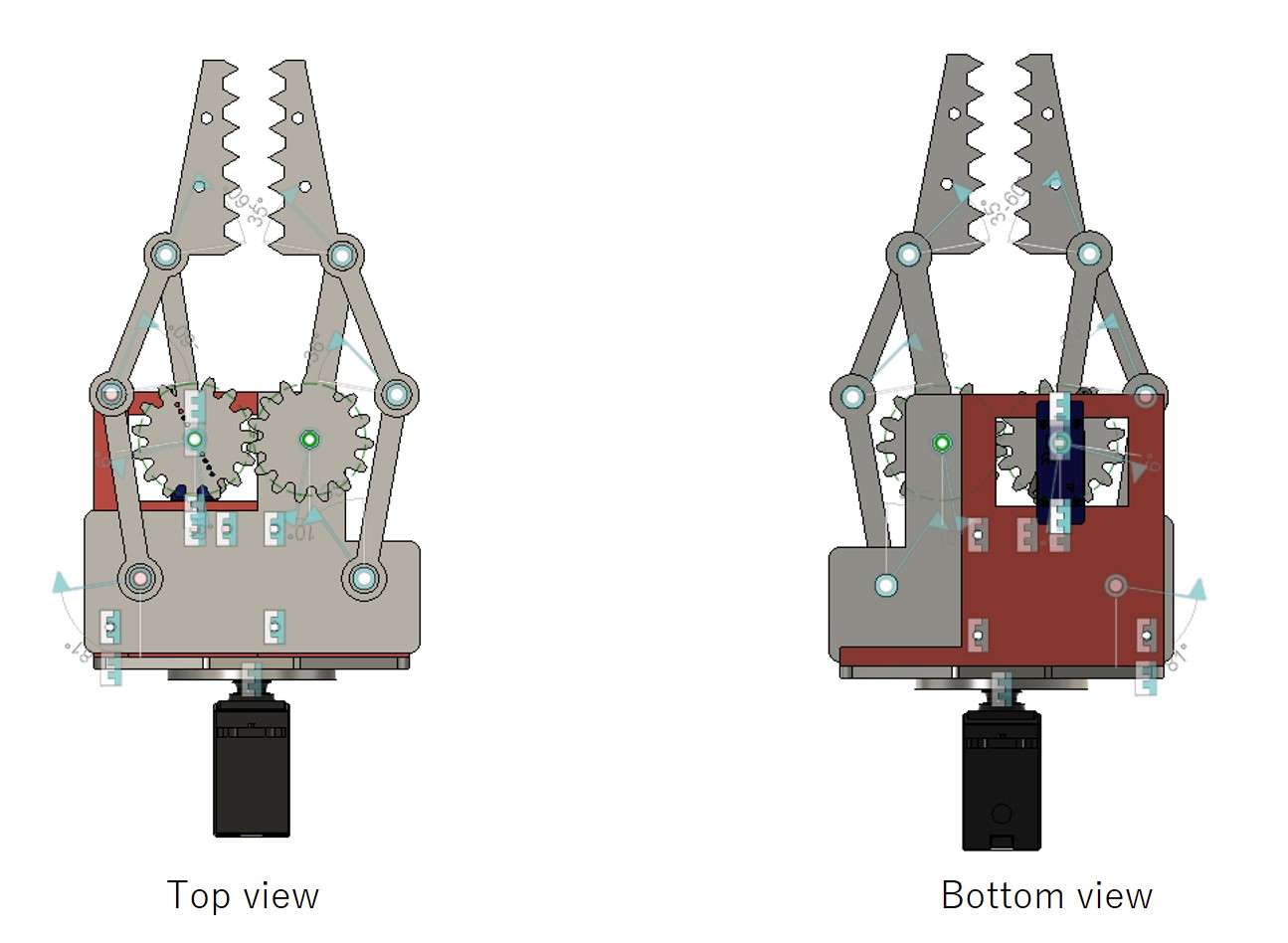
However, we did not know the detailed mechanisms of the hands. Then, we referred to some basic robotic hands models and tried to understand how these major robotic hands are moved. After learning it, we defined the motions of major mechanical hands like a below picture. As a below figure shows, as long as links are joined as a parallelogram, the top side link will move by keeping its orientation same during the joint is rotating. Then, when a hand part is attached to the top side link, the hand part will move to open or close.
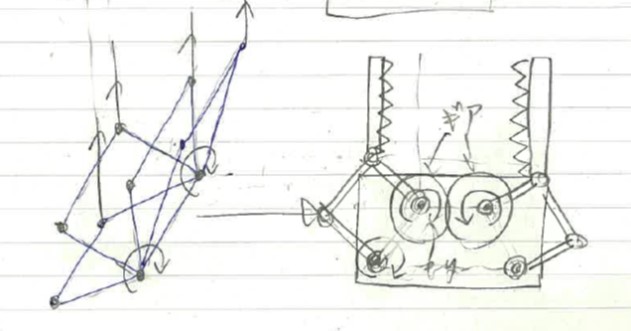
Based on the motion, we sketched an overview of our mechanical hand.
2. Manipualtor¶
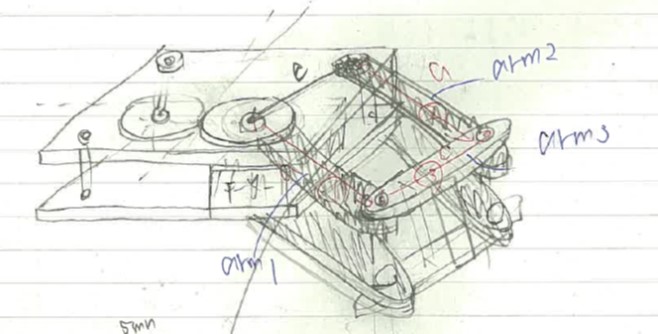
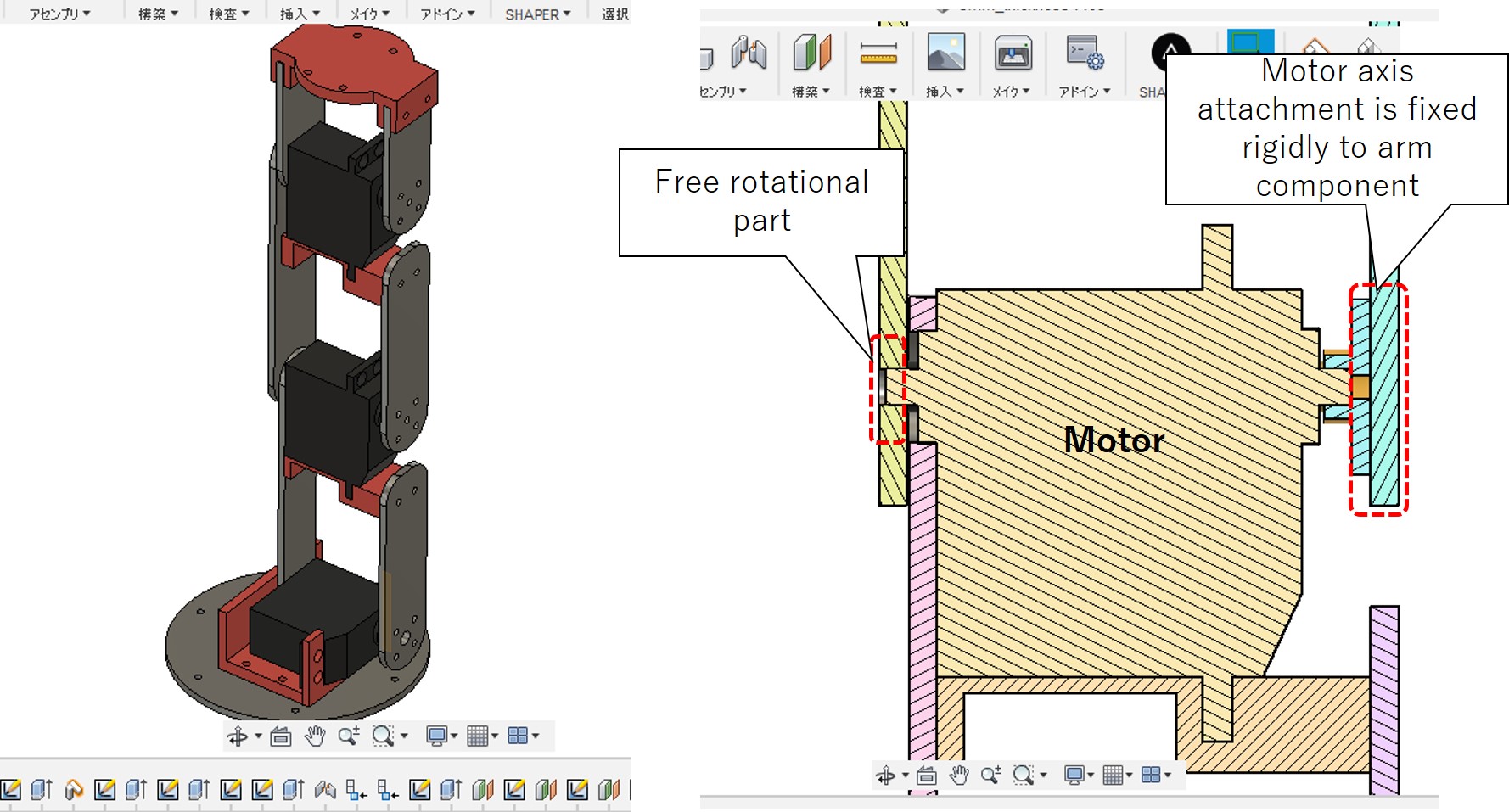
To build a manipulator, how to connect motors to arm parts was the most mysterious thing for us, because we wondered if a motor could support arms and other motors. Then we referred existed arm robots, example1 and example2
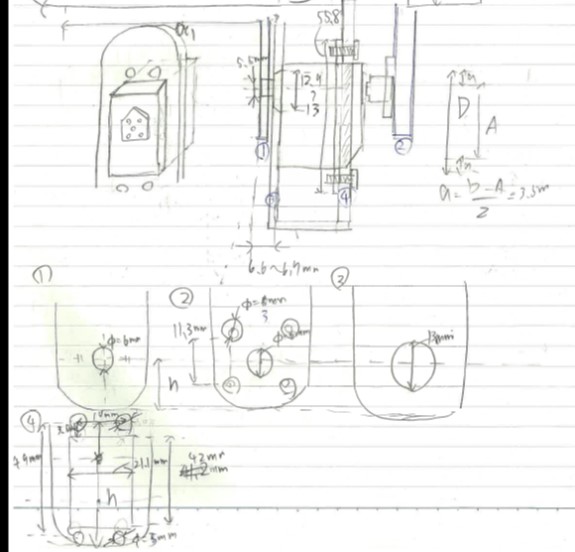
From the above figure, the motors seem to be joined directly to arm components. Then, we decided to use the motor axis attachments to connect the motors and arm components. So, a rough sketch of the connection of a motor and arm components is shown like below figure.
Designing CAD model¶
Based on the above sketches and our understandings, we designed 3D models in Fusion360. To assemble components, we planned to use acrylic plates having 3 cm thickness and 3D printing.
1. Mechanical Gripper¶
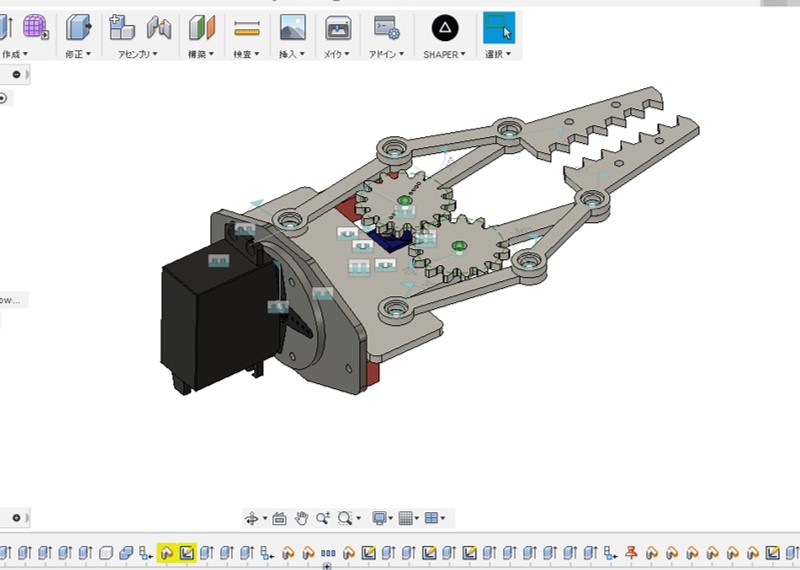
To design the hand, the 3D models of servo motors were necessary to define accurate sizes of components. Then, I download the 3D models of SG 90 micro servo and parallex servo motor from GrabCAD.
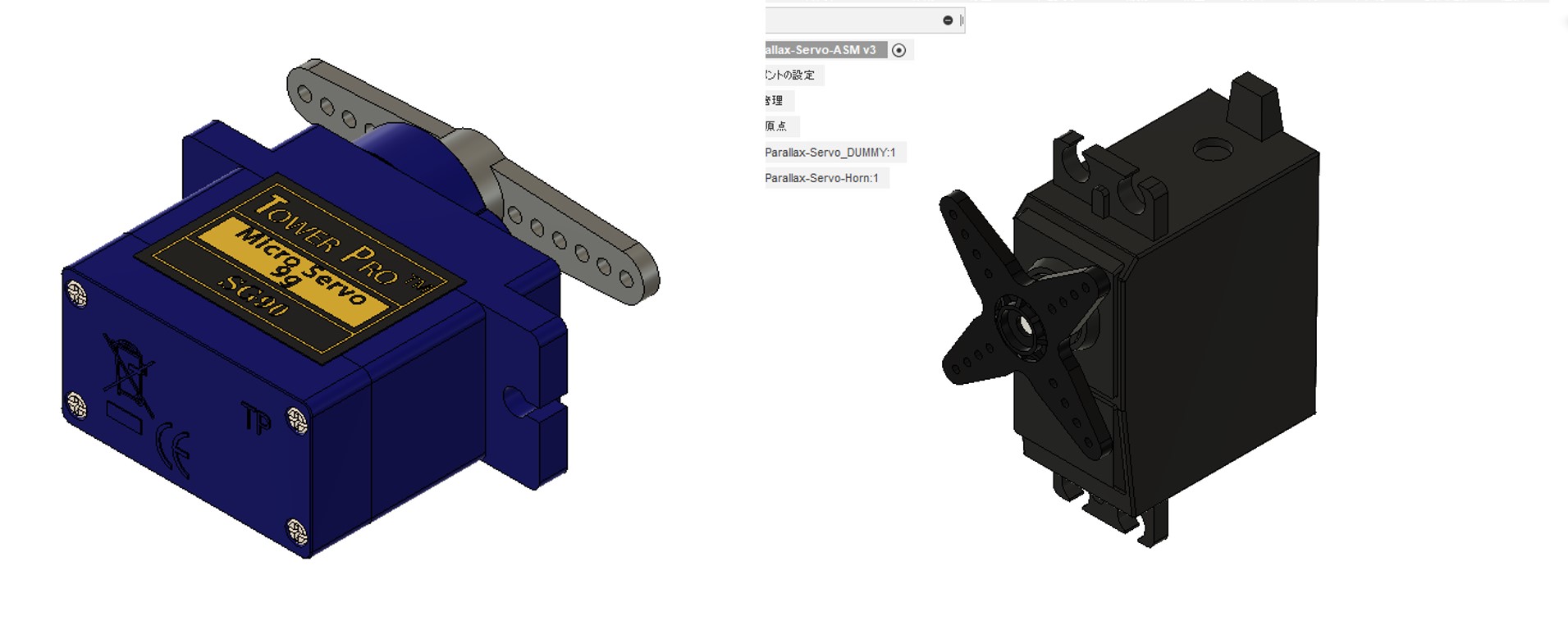
By importing these models, we created 3D model of out robotic hand.
2. Manipulator¶
Assembling¶
After completing cutting acrylic boards and 3D printing, we assembled them by using screws and bearings.
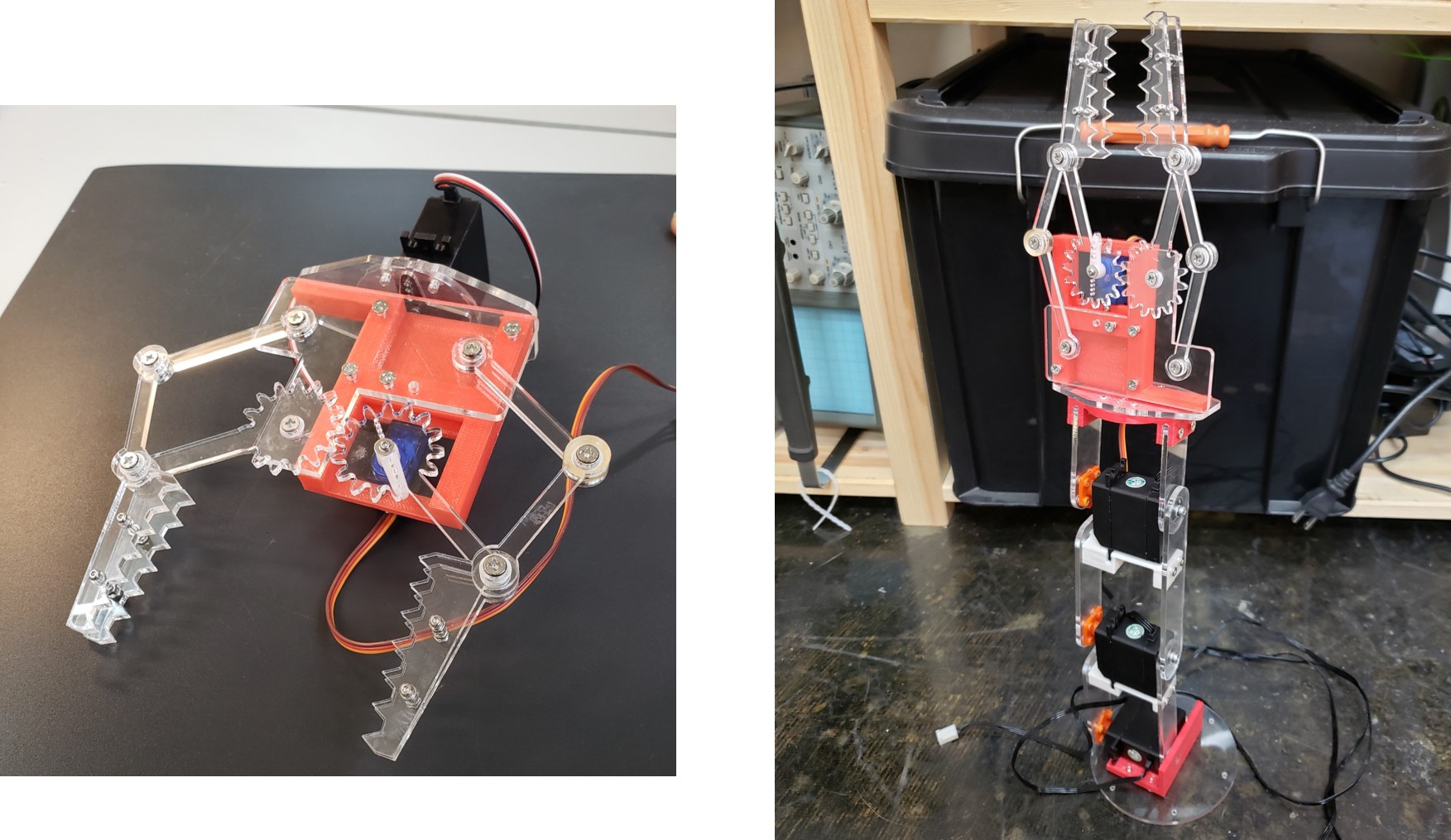
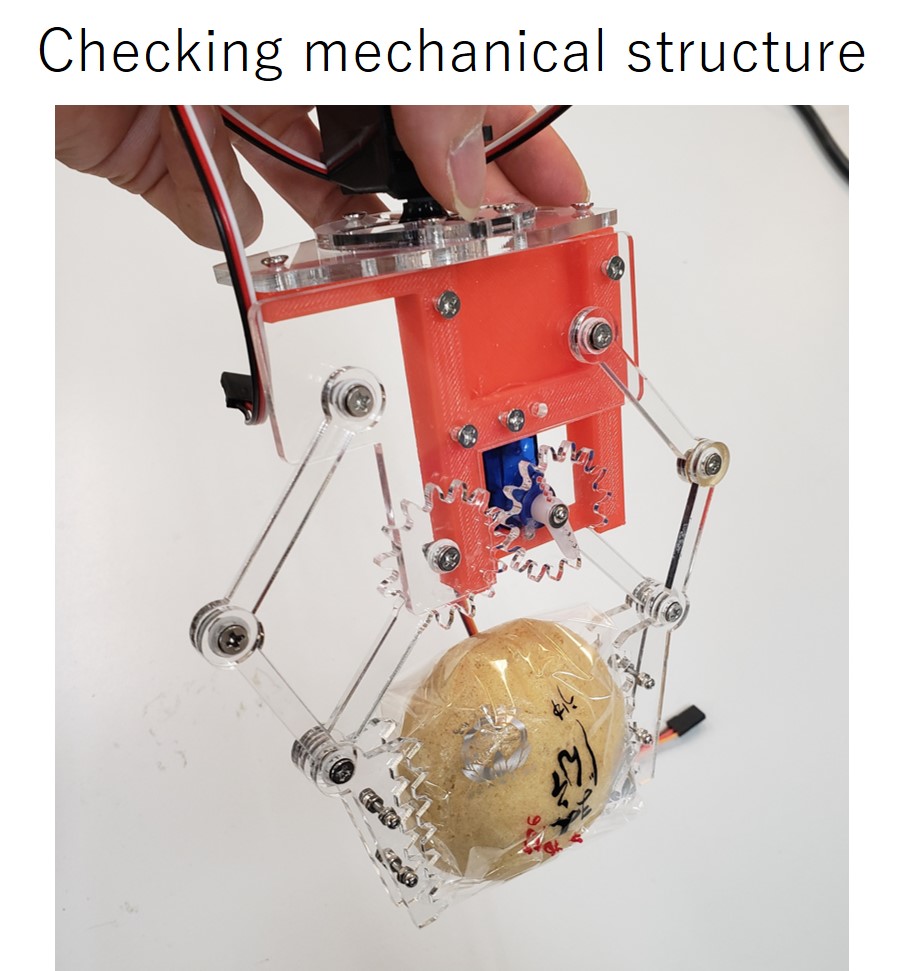
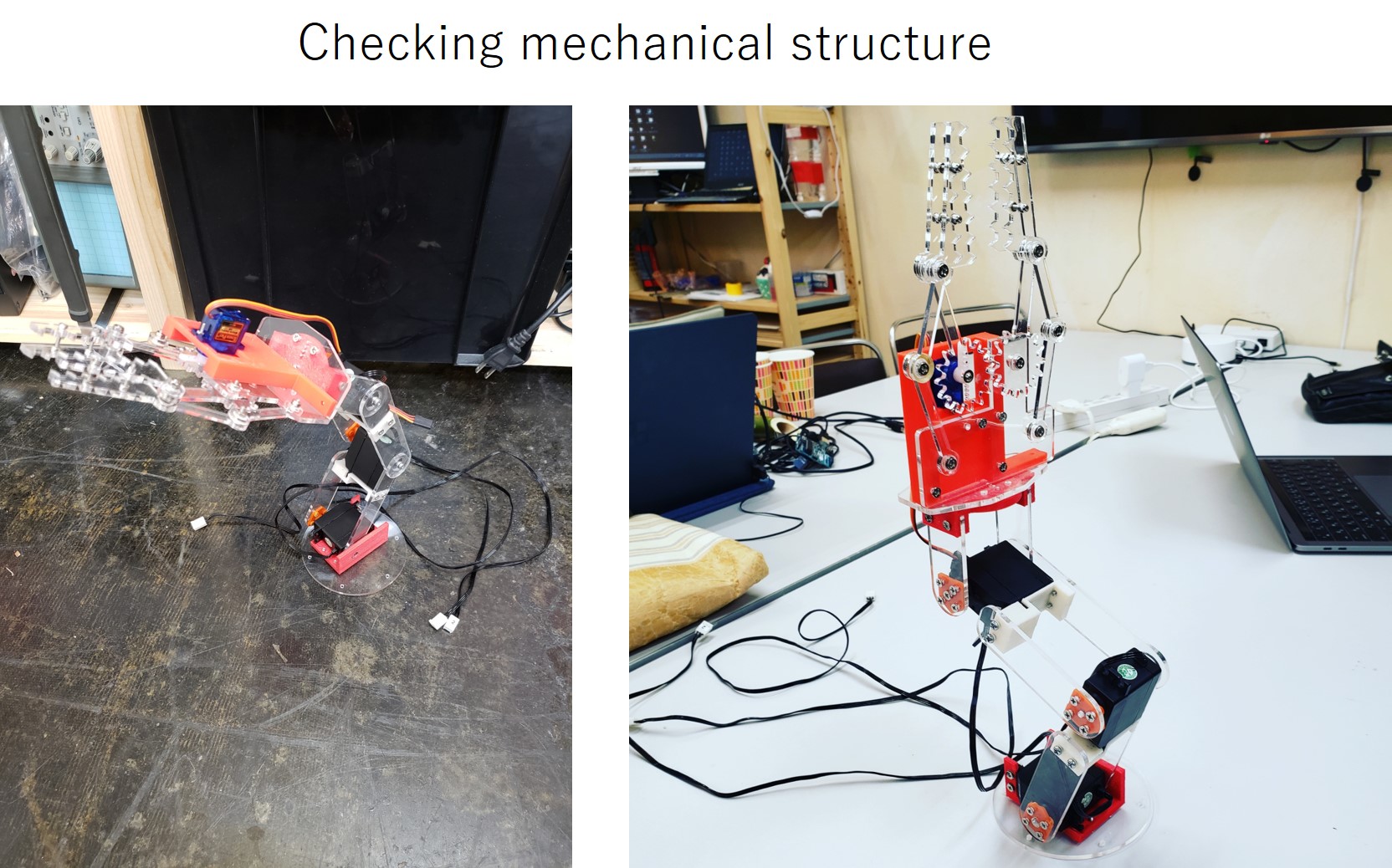
Checking motions by manual handling¶
To check the mechanical structures of our robot, we handle the robotic hand and arm robot manually. As the above pictures show, our robot could move by manual handling, so we thought our mechanical design was well.
Download Link¶
SVG files
3D CAD files
Mechanical gripper
Arm robot
1. MotorSuport 1
- MotorSupport 2
- Base
- Hand conenction