Abandoned Project<
Project Description<
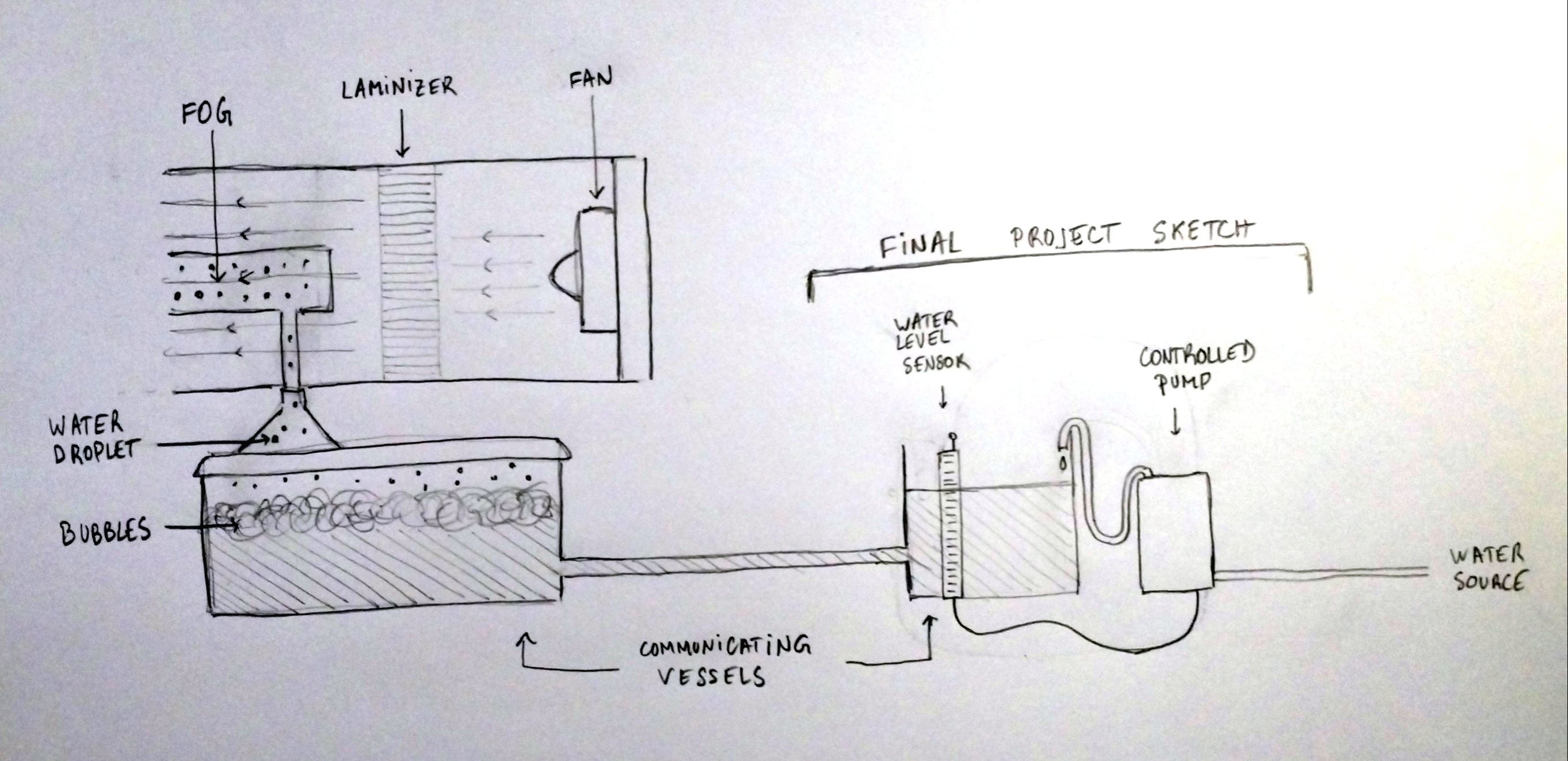
This part of the final project would be a module that can be added to our setup that would allow one to control and maintain the water level above the nebulizers and hence make the supplied water mass rate constant.
Communicating Vessels<
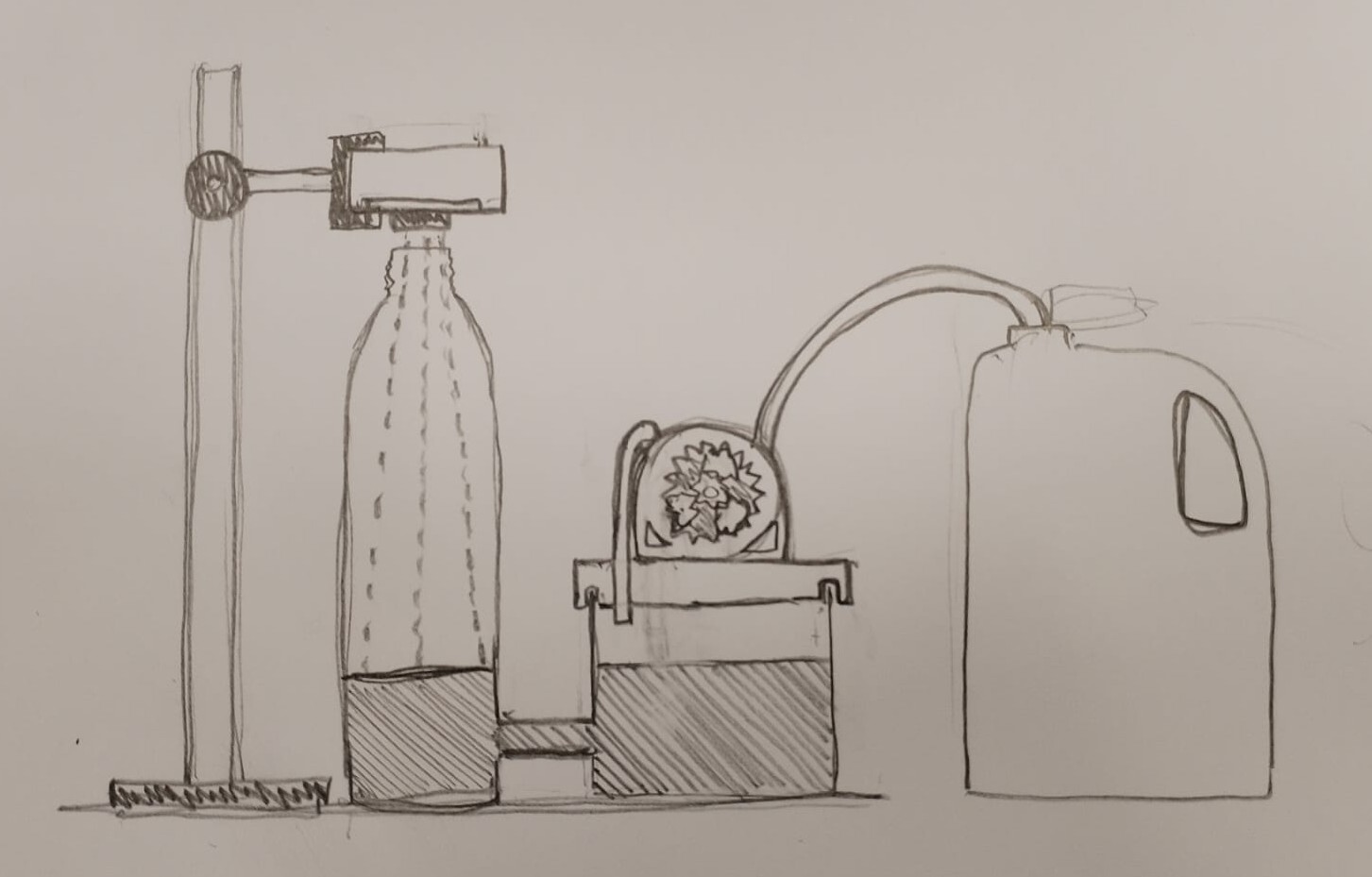
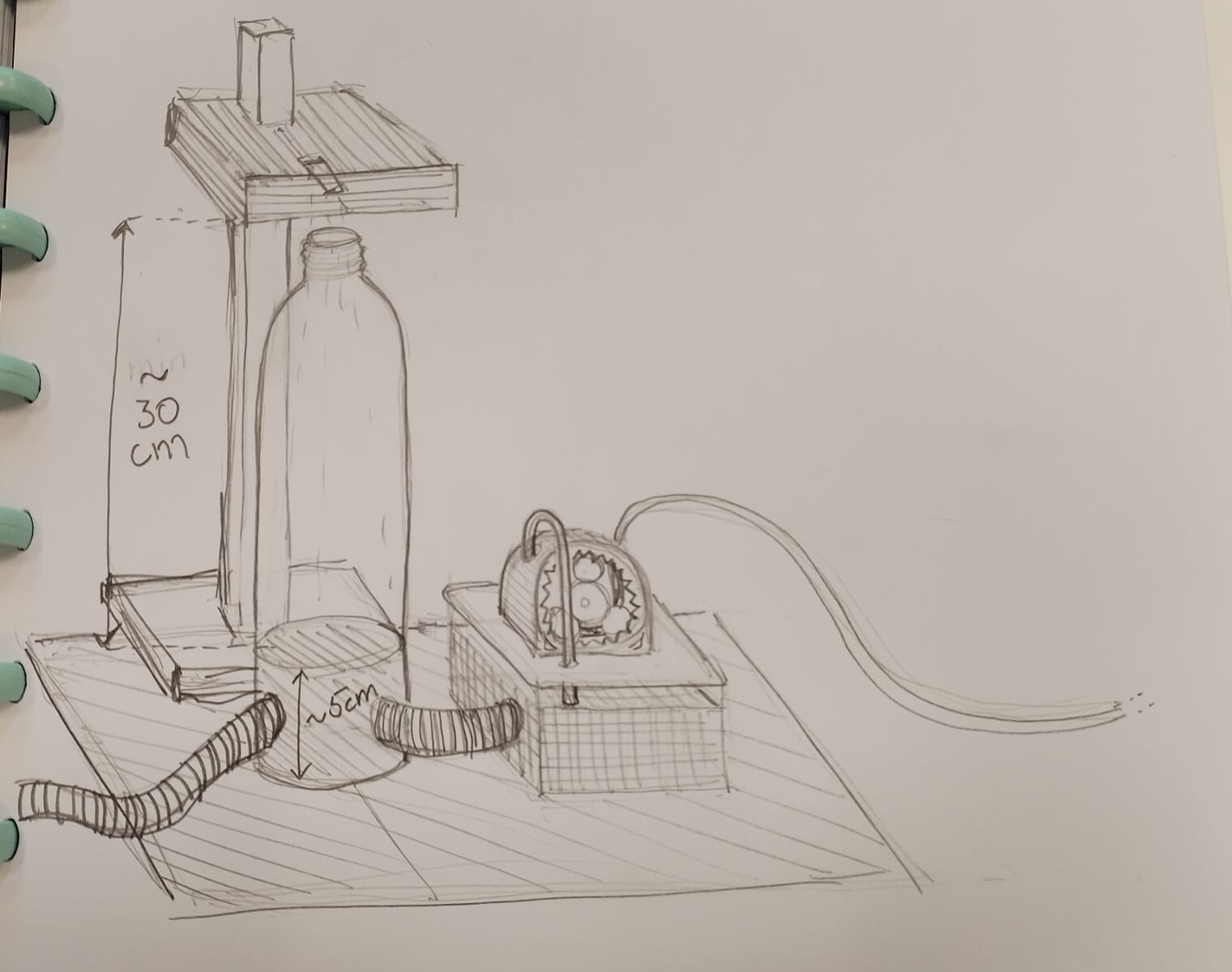
The water supplier in which the nebulizer are immersed is bubbly when working. The water level is then quite hard to measure, even for a device. I would then transform the supplier in a communicating vessel with another tank whose water surface would be quite flat and therefore whose water level would be easier to measure.
Water Level Sensor and Microcontroller<
In this second tank would be immersed a water level sensor that would send its measurements to a microcontroller. The microcontroller would then compare the measurments to thresholds that activate and deactivate a pump.
Let's note that most of water level sensor works using water conductivity properties. However, we use demineralized water to avoid nebulizer damaging. Therefore we must find other ways to measure water level.
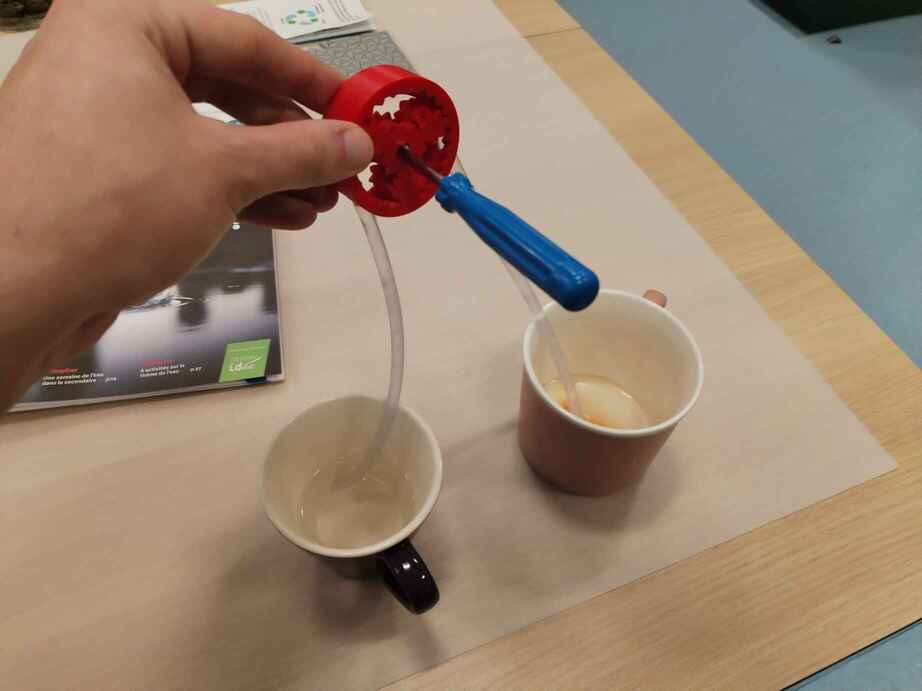
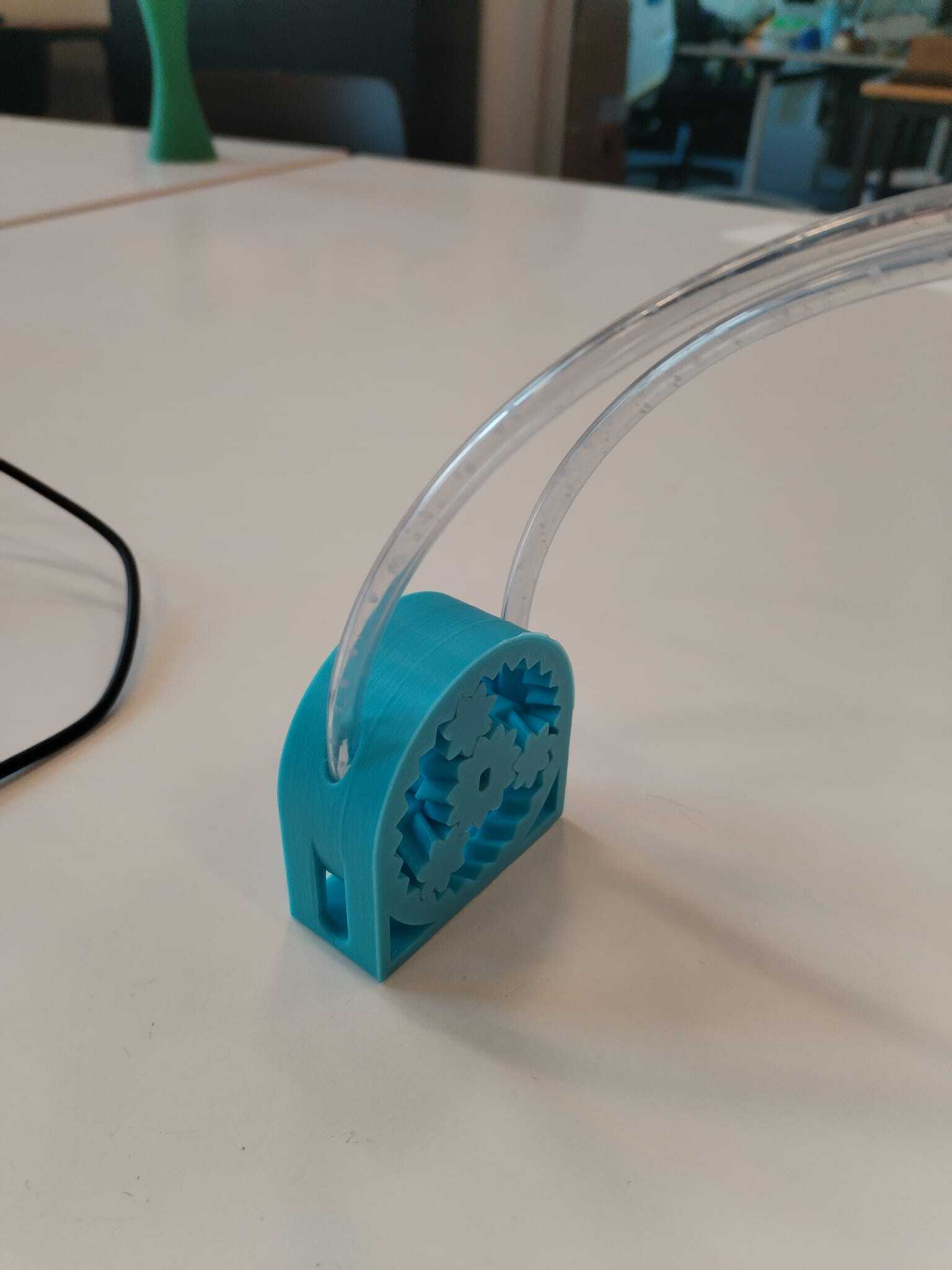
Pump<
When the pump is activated by the microcontroller, it adds water in the tank at a fixed rate and the water level increases. When the water level exceeds a certain value, the microcontroller stops the pump.
Pump<
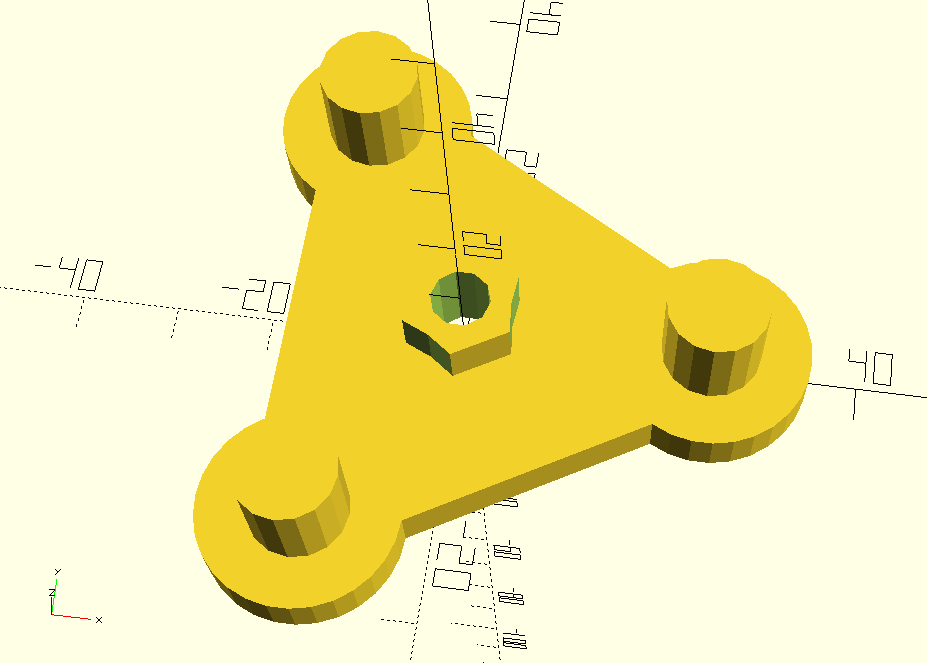
Design and 3D Print<
To do : Resume Week 2 doc
To do : Resume Week 5 doc
To do : Resume Work
Motor<
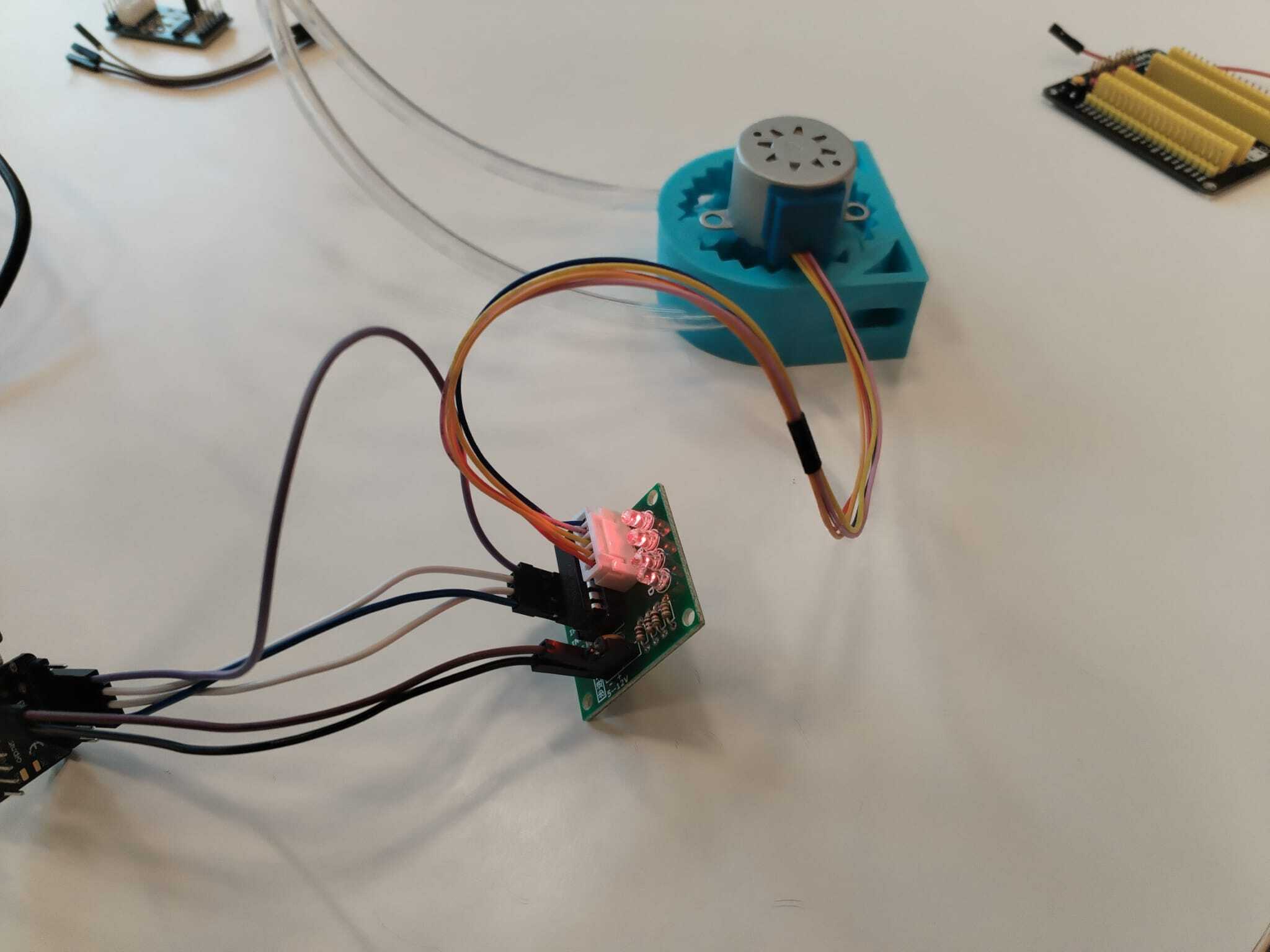
Water Level Sensing<
Optic Time of flight Sketches<
VL53L4CD ToF for water level sensing tutorial
Water mass measurment idea<
If I want a water level precision \(\Delta p\) and the tank has a surface \(S\) the volume precision would be :
hence the mass measurment precision is :
with \(\rho\) the volumic mass. For water, with \(\Delta p=1mm\) and \(S=10cm^2\), the required mass precision is \(m=0.1g\).
Control Sketch<
