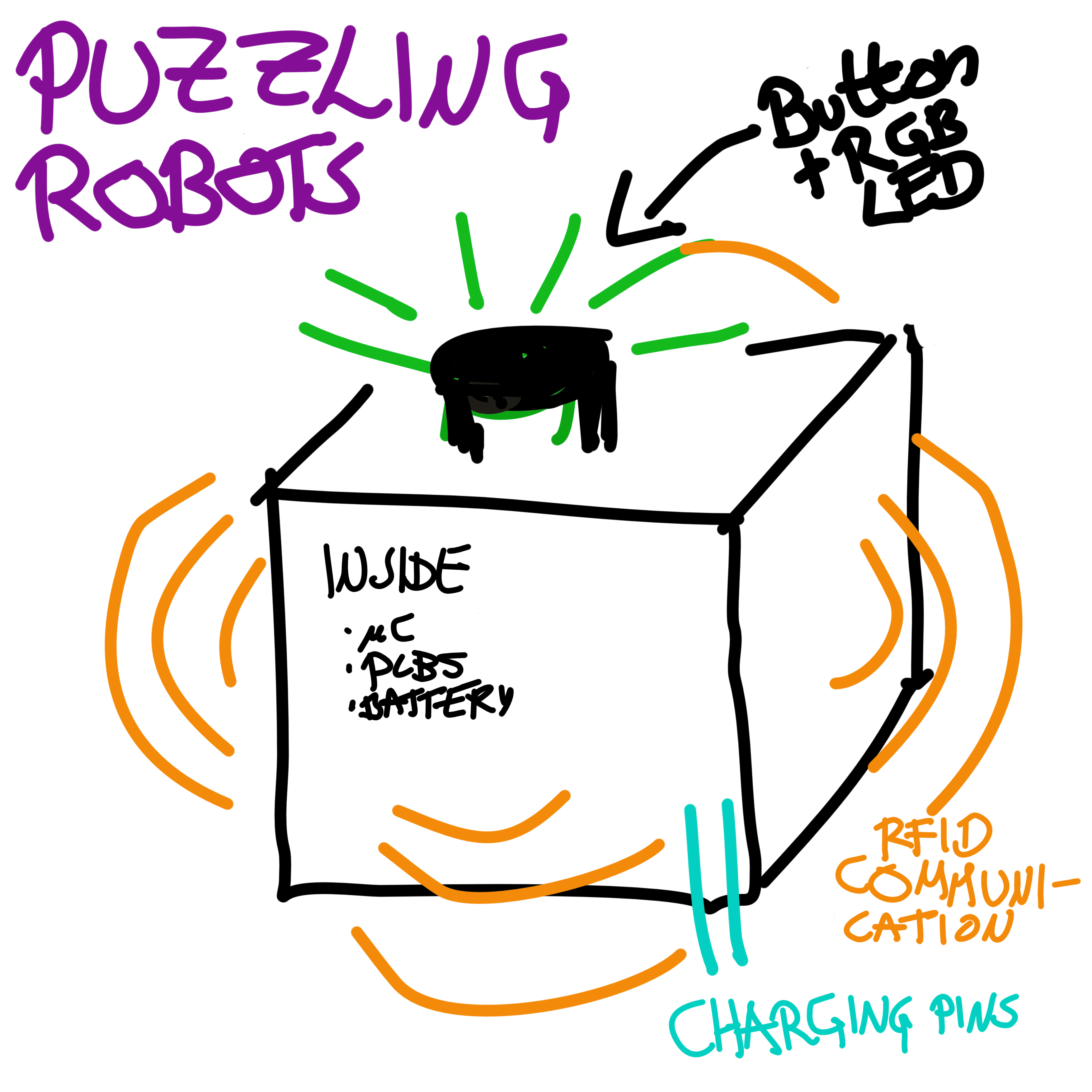
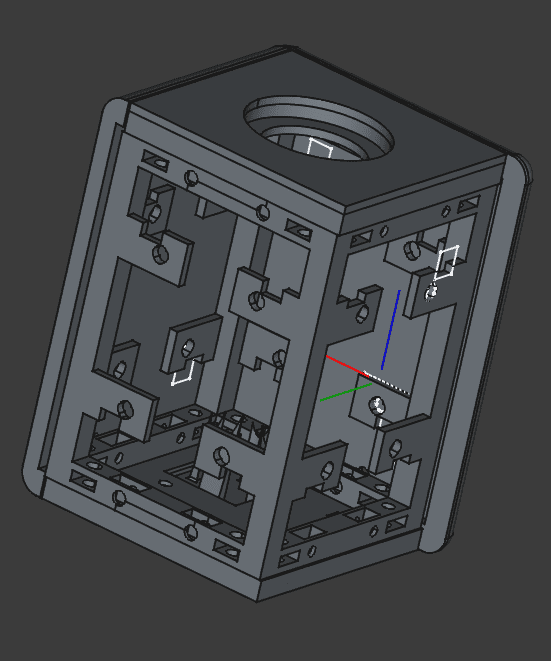
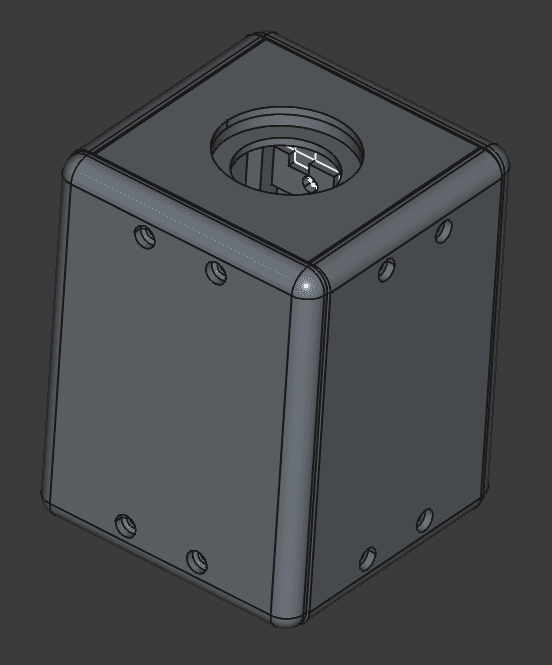
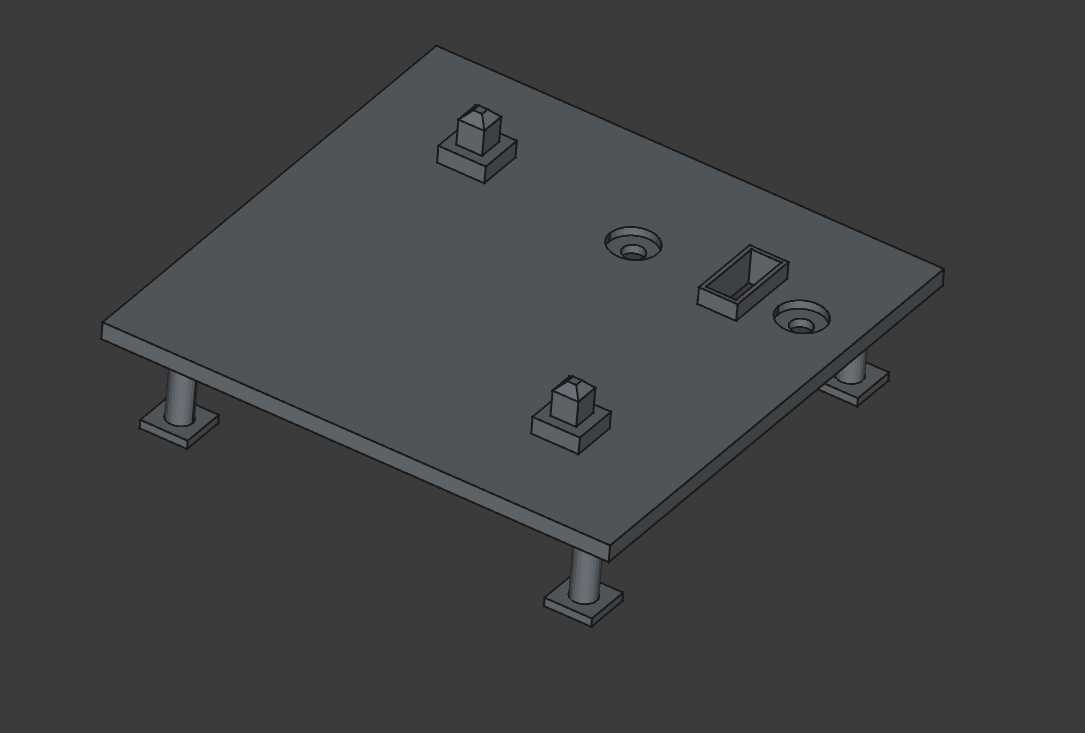
What is the project? Basically a bunch of robotic cubes with a button. Each one looks like this ->
Alone, each robot can only control an LED.
Together, they form form a team that you can play with or use to train your movement coordination, reaction, concentration, or memory.
The goal is to support medical/ psychological challenges such as dementia, Autism, or ADHD that struggle in precisely these fields..
The goal during the FAB Academy is to build the robotic platform so I test the algorithms.
Developing the algorithm itself is considered out of scope of the FAB Academy.
Sketch of a single robot and connection to the outside. Made with Krita.
How to use it
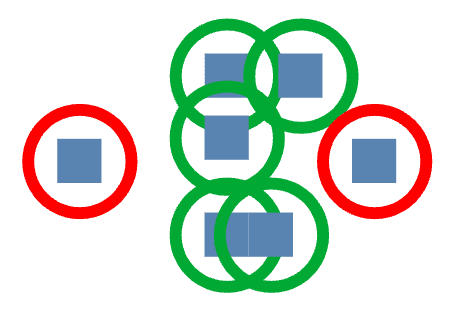
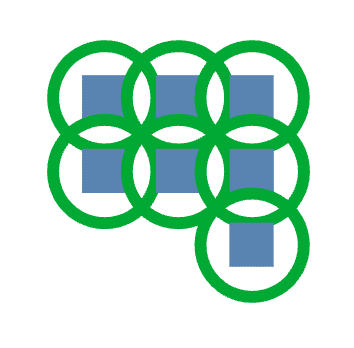
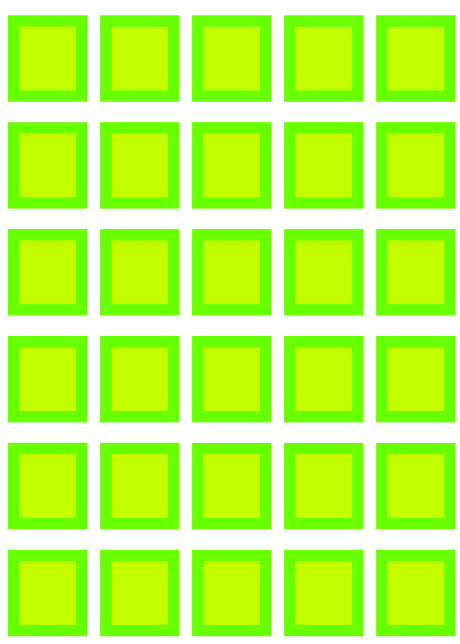
To use them place them on a flat surface. It works best if they are positioned in a grid pattern near to each other as shown in the picture below:
The RFID module only allows limits range connectivity represented by the circles around the squares.
The robot with the green range circle would establish communication, the ones in red would not. Left: recommended constellation.
Made with Libre Office.
Now, hold one of the cards and hold them close to the side to one (or several depending on the game you choose) robot.
If you use several cards, the robots will eventually agree on one game, it might just take some time.
Do research and comparison Wireless Communication options, define requirements,
and design circuit for chosen communication technology
Do research and compare possible processing options. Comparison to microcontroller alternatives.
Define requirements and design development board for chosen microcontroller
Do research and compare user interaction options and design the circuit
Define requirements and design power management circuit for each module. Compare
different types of batteries
Define requirements and design user interaction circuit
Produce, solder, and test PCB designs
Incorporate all designs into one PCB for simplicity
Requirements:
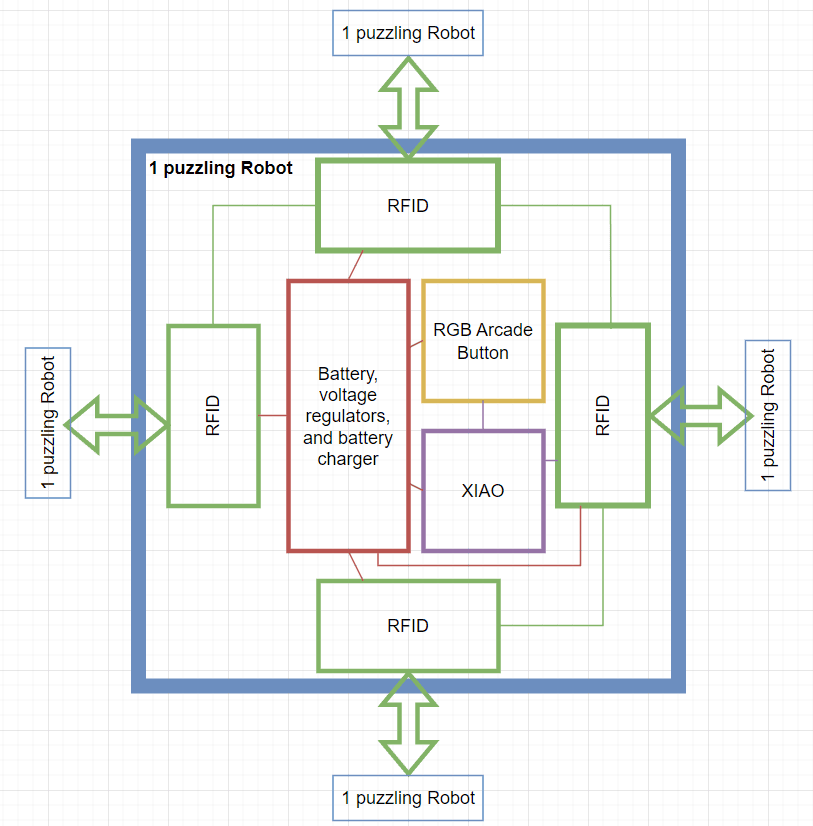
Design in separate modules for easier debugging
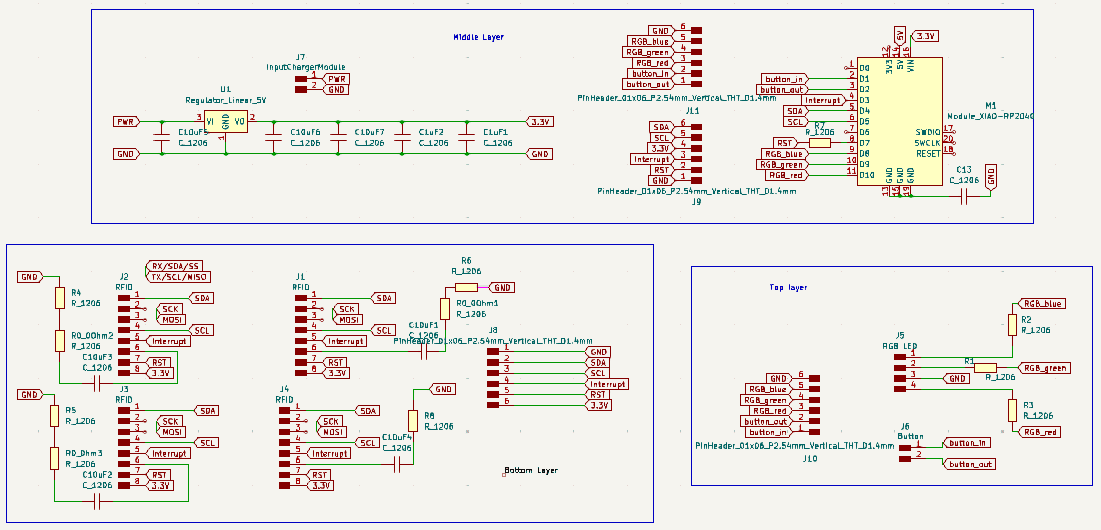
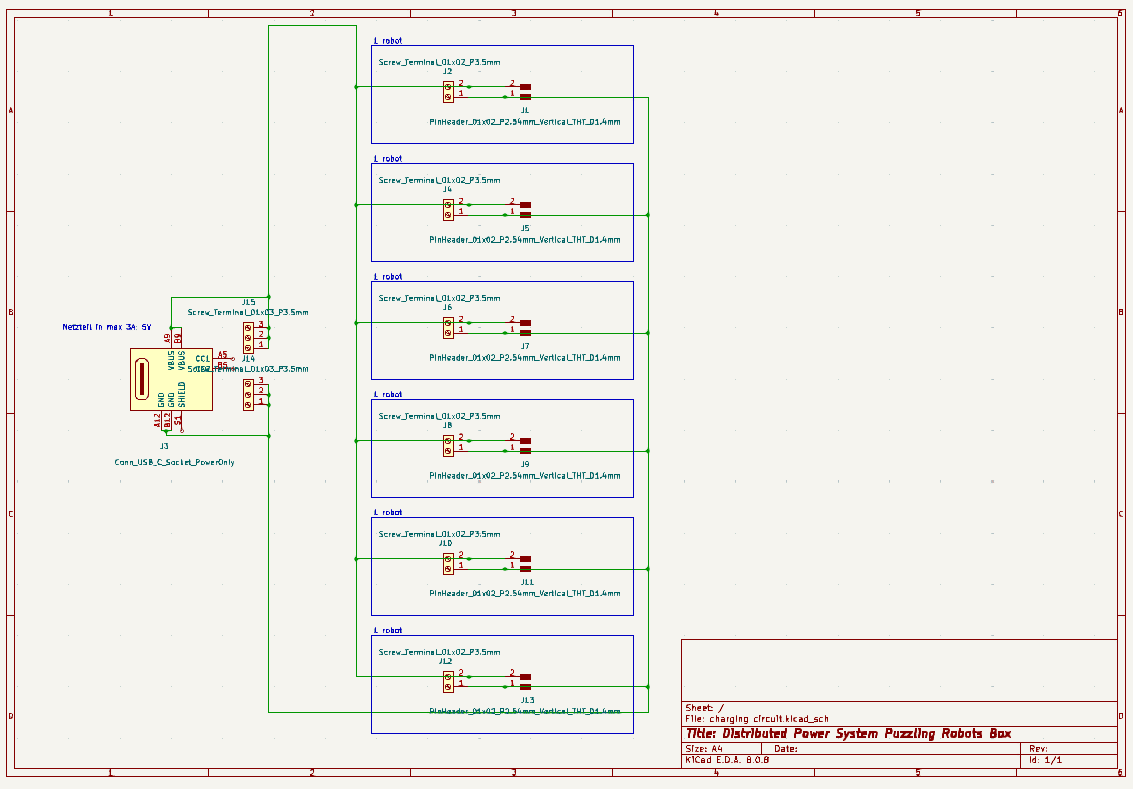
Current status: V3General electric building block schematic V3. Made with KiCad EDA
There are many definitions of this discipline. This is how I see it (quote):
Robotics aims to solve problems by developing robots specific to that task. A swarm or
school is a term that is often used to describe a large number of insects or fish working
in a coordinated manner to achieve a common goal. These swarms usually consist of the
same species of animals that can only use their bodies, appendages, and environment
to communicate and work as a team to survive. The members of the swarm tend to be
relatively small, without many outstanding capacities if isolated from their peers.
Swarm robotics is a combination of both of these ideas: many relatively simple,
similar robots working as a team to reach a common goal using only
local interactions as sources of information. [...] Because of this, swarm robotics
is typically characterized as being scalable, flexible, and robust.
Goal: Develop a concept, design, and prototype for modular building
blocks (see (1), (3), (4), and (5) for examples) that can be manually connected and
disconnected. These modules will include removable connections for information
propagation (see (6), (7), (8) for reference) and operate using swarm robotics principles (9). The
system's functionality will be adjustable via a user interface.
I will focus on static or 2D systems to ensure feasibility. The primary objective is
to create a modular system of up to 10 simple, interactive modules that can be physically
assembled, tested, and used in games such as puzzles, reaction-based tasks, or memory
challenges.
Use Case: Exploring gaming opportunities, including puzzles, serious games, and
reaction-based activities, using modular robotic systems.
Medical use for game treatment of depression, dementia, etc. Might be useful to train with ADHD or Autism symptoms.
Nickname: “Puzzling Robots” (puzz rob)
Target audience: ages 3-5 and 60+ (with or without described criteria)
(1) Kyle Gilpin, Ara Knaian, and Daniela Rus (2010) Robot Pebbles: One Centimeter
Modules for Programmable Matter through Self-Disassembly, IEEE
(2) Kirstin Petersen, Radhika Nagpal, Justin Werfel (2012) TERMES: An Autonomous
Robotic System forThree-Dimensional Collective Construction, MIT Press
(3) Bhalla and Bentley (2012) Programming Self-Assembling Systems via Physically Encoded
Information Morphogenetic Engineering Understanding Complex Systems, p. 157-188
(4) Gross and Dorigo (2008) Self-Assembly at the Macroscopic Scale, Proceedings of the IEEE
(6) Kevin A. Holdcroft, Christoph H. Belke, Samir Bennani, and Jamie Paik (2021) 3PAC:
A Plug-and-Play System for Distributed Power Sharing and Communication in Modular
Robots, IEEE/ASME Transactions On Mechatronics, Vol. 27, No. 2, p. 858-867
(7) Christoph H. Belke. and Jamie Paik (2019) Automatic Couplings With Mechanical
Overload Protection forModular Robots, IEEE/ASME Transactions On Mechatronics,
Vol. 24, No. 3, p.1420-1426
(8) Kevin Holdcroft, Anastasia Bolotnikova, Christoph Belke, and Jamie Paik (2022),
Modular robot networking: a novel schema and its performance assessment, IEEE/RSJ
International Conference on Intelligent Robots and Systems (IROS)