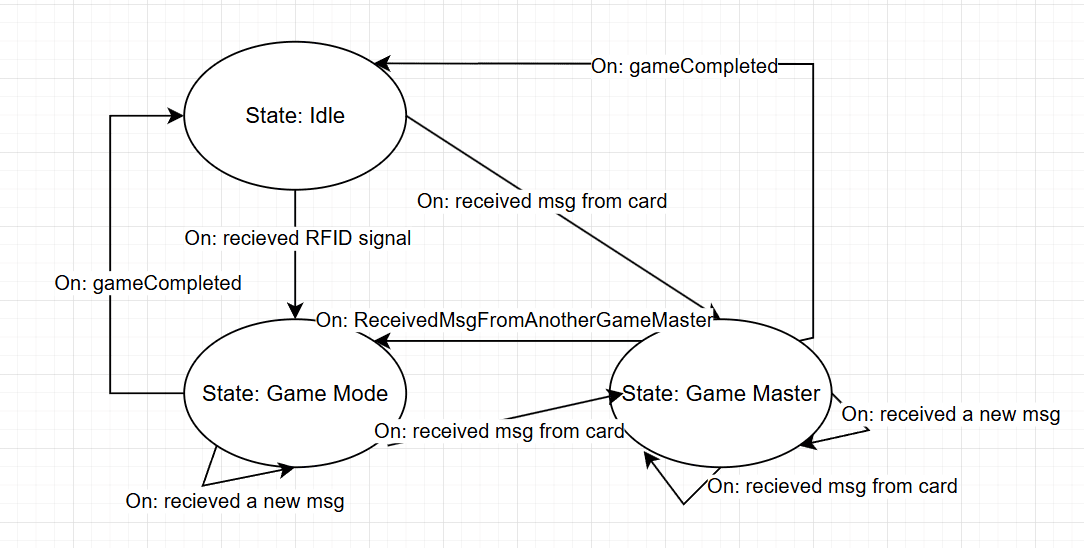
While it does know what is happening, the robot will just wait until it receives a message.
Once it does it can either be from another robot or from an RFID card. If it is the first option,
the robot will participate in the game. If it is the second option, the robot will start a game.
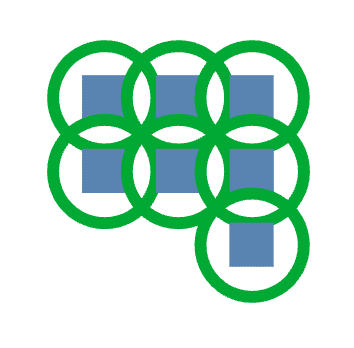
The RFID modules only have a limited range for up to approx. 7cm. This means, that only the direct neighbours can communicate.
Please see the picture below for a better understanding:
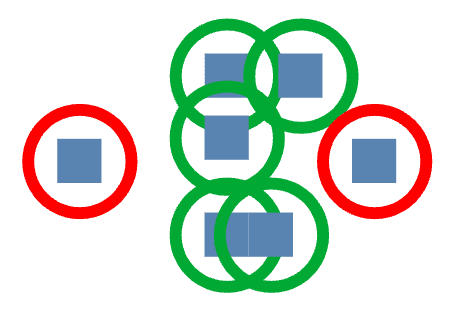
The robots surrounded by a green circle are still within communication range. The ones
surrounded by a red circle are not. The picture on the left shows the ideal way the robots should be positioned to each other.
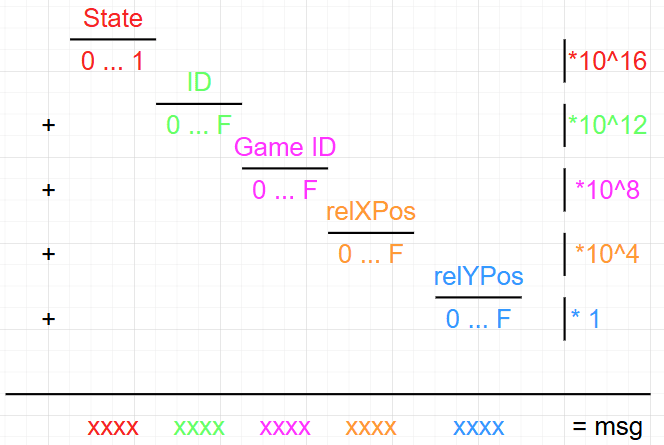
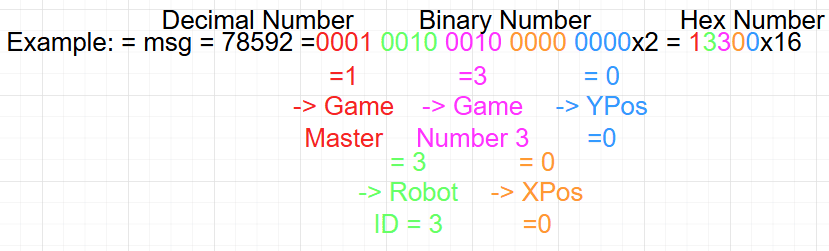
The RFID protocol works by writing to a specific memory location as a hex or binary number. As such, the message sent
will be coded by utilizing this structure. You will find a graphic explanation of the message structure below:
Left: calculating the value for the message that will be sent; Right: example of decoding an incoming message