Final Project: Puzzling Robots
"I have not failed. I've just found 10.000 ways to create something else.
- adapted from Thomas A. Edison "I have not failed. I've just found 10000 ways that won't work."
Overview
Goal: Develop a concept, design, and prototype for modular building blocks (see (1), (3), (4), and (5) for examples) that can be manually connected and disconnected. These modules will include removable connections for information propagation (see (6), (7), (8) for reference) and operate using swarm robotics principles (9). The system's functionality will be adjustable via a user interface.
I will focus on static or 2D systems to ensure feasibility. The primary objective is to create a modular system of up to 10 simple, interactive modules that can be physically assembled, tested, and used in games such as puzzles, reaction-based tasks, or memory challenges.
Use Case: Exploring gaming opportunities, including puzzles, serious games, and reaction-based activities, using modular robotic systems. Medical use for game treatment of depression, dementia, etc. Might be useful to train with ADHD or Autism symptoms.
Nickname: “Puzzling Robots” (puzz rob)
Target audience: ages 3-5 and 60+ (with or without described criteria)
Predesign and To Do List
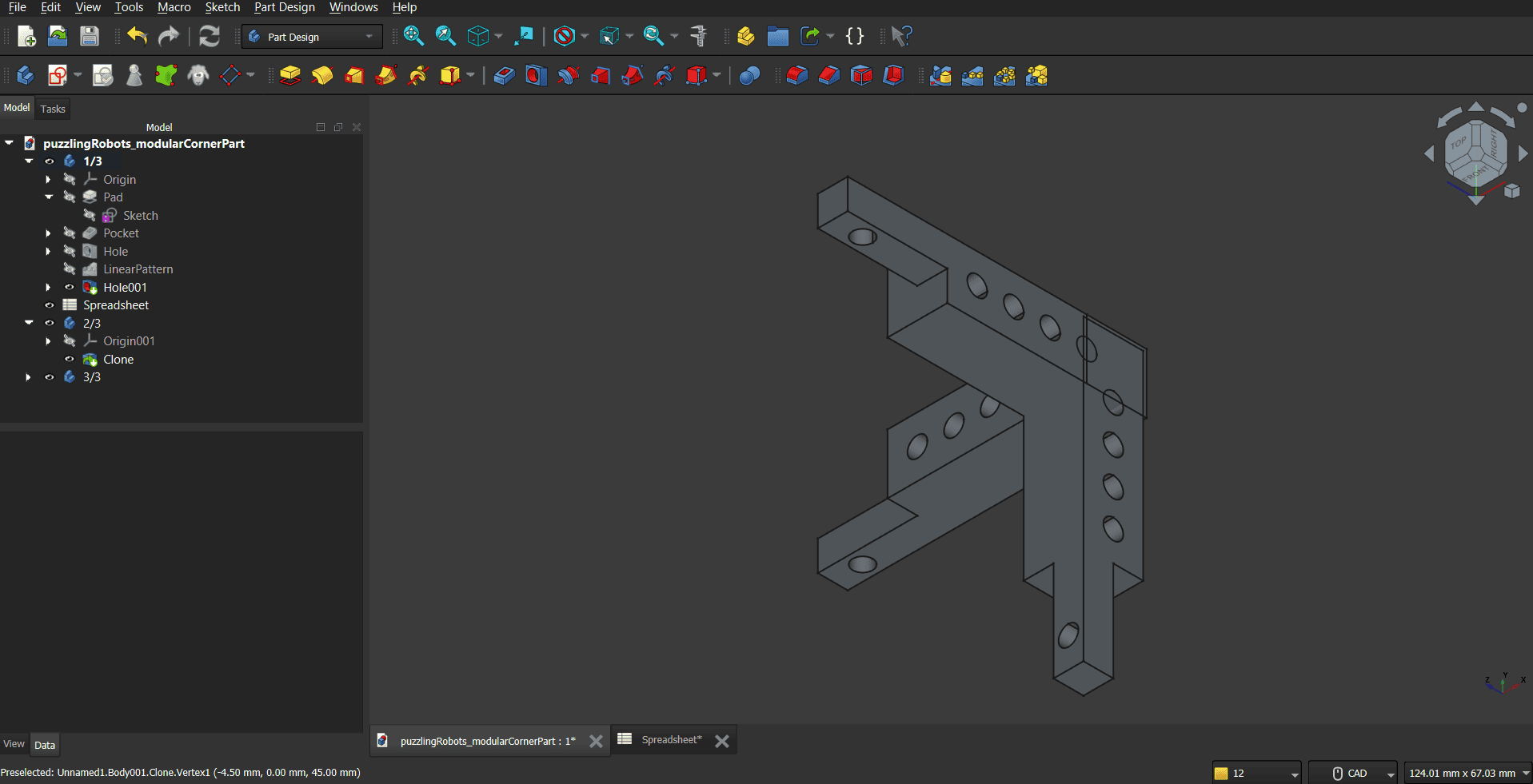
Please read these files for more information:2D and 3D models
Link to initial documentation, images, and files

Download link files:
- Download: Half a puzzlingRobot assembled FCStd
- Download: Modular cornerInner design V4 FCStd
- Download: Modular cornerOuter design V4 STL
- Download: Modular cornerInner design V4 STEP
- Download: Modular cornerOuter design V4 STEP
- Download: all corner pieces GCODE prusa MK4
Design ideas:
- Easy electronics mounting by adding pieces step-by-step
- Designed around the RFID module
- Make them as small as possible from above to fit more of them on a table/ floor
- If changes in size are required, only half a set of corners has to be printed. Thus, saving recourses and time as well as reducing the environmental impact.
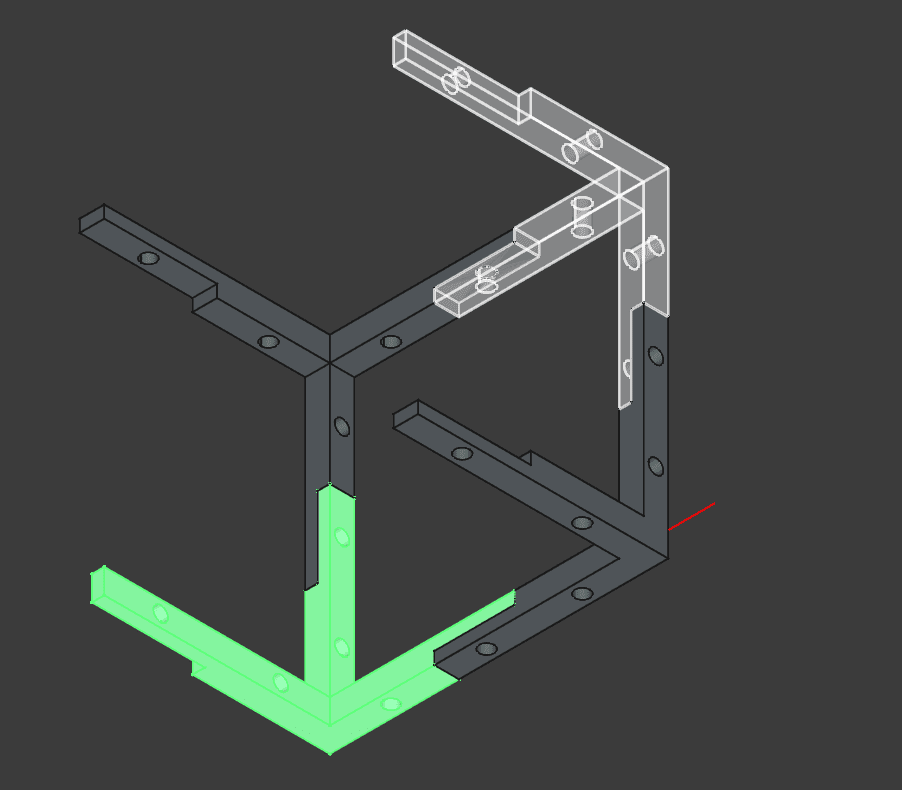
Product description:
- There are 2 types of corners: Inner (longer side towards the middle) and Outer (longer side away from the robot).
- Each corner consists of 3 linearly independent fingers.
- One finger is longer. It is meant as the height and goes parallel to the longer side of the RFID module.
Assembly of robot:
- Print 4 corners of each type (Inner and Outer). Get the other required components.
- Start screwing the lower half of the robot. An Inner goes next to an Outer and so on.
- Program,attach, and electronics to the base. More detailed information tba.
- Finish attaching the upper half of the puzzRob including the button. Above each Outer goes another Outer. Same for the Inner.
- Charge if necessary.
- All set, enjoy :)
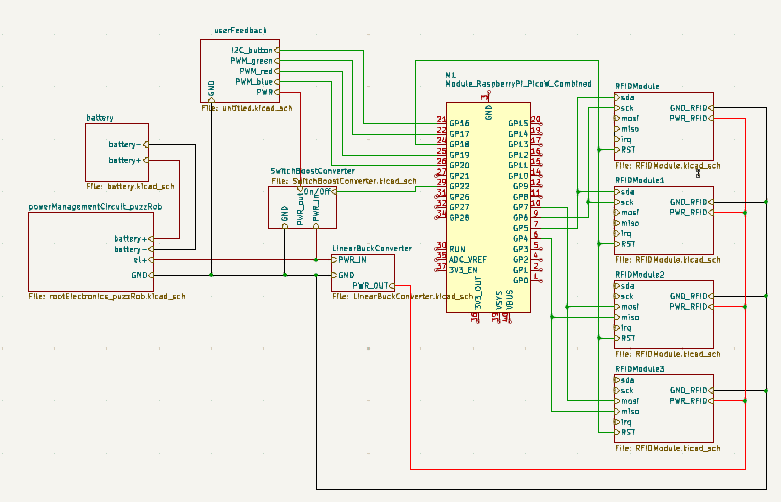
Electronics
Link to documentation, images, and files
Download files:
- Download: all schematics V1 PDF
- Download: kicad file RFIDModule V1 KICAD_SCH
- Download: kicad file battery and charging circuit V1 KICAD_SCH
- Download: kicad file linear buck converter V1 KICAD_SCH
- Download: kicad file switch boost converter V1 KICAD_SCH
- Download: kicad file user interaction V1 KICAD_SCH
- Download: kicad file block diagramm-ish circuit V1 KICAD_SCH
- Download: kicad project file V1 PRO
Primary aims when designing circuit:
- Keep noise levels down for RFID modules
- Use as little pins for the User Interaction as possible
- Lipo battery charging must be safe
- Power from a separate battery to prevent false readings from sensors
- Try to keep the cost down
Materials & List of components
BOM (electronics only)
For more information on why design around these key components, go to this page.
For more information on the design process of the schematics go to this page. Even more information check out BOOM.
I THINK THE PACKAGING TYPES ARE NOT QUITE THE SAME YET AND DO NOT CORRESPONT WITH THE FOOTPRINTS. TODO: CHECK (AND FIX) THAT
| Circuit | Component Name | Quantity | Octopart | AliExpress | Other |
|---|---|---|---|---|---|
| Pico | Pico Zero RPxxx | 1 | - | 14.19€ (10 pcs) | |
| UI | Arcade button RGB | 1 | 0.99 (28mm, rgb) | ||
| BOOST | 1n5819 | 1 | - | - | 0.077€ |
| BOOST | MC34063AP | 1 | 0.274$ | 0.99€ (10 pcs) | |
| BOOST | L 2.2uH | 1 | 0.376$ | 0.64€ (10 pcs) | |
| BOOST | C 100uF | 1 | 2.44$ | 0.99€ (50 pcs) | |
| BOOST | C 220uF | 1 | 2.44$ | 1.99€ (10 pcs) | |
| BOOST | C 470pF | 1 | 0.042$ | 0.99€ (100 pcs) | |
| BOOST | R 0.33Ω | 1 | 0.34$ | ||
| BOOST | R 120Ω | 5 | 0.1$ | 0.55€ (100 pcs) | |
| BOOST | R 75Ω | 5 | 0.06$ | 0.99€ (20 pcs) | |
| RFID | 4 | - | 7.29€ (10 pcs) | ||
| RFID | C 100uF | 4 | 2.44$ | 0.99€ (50 pcs) | |
| BUCK | AMS1117 | 1 | 0.036$ | 0.99€ (20 pcs) | |
| BUCK | C 100pF | 2 | 0.21$ | 0.99€ (20 pcs) | |
| BUCK | C 10 uF | 2 | 0.172$ | 0.99€ (30 pcs) | |
| CHARGE | Charging module with protection | 1 | 0.27€ | ||
| Total cost per robot | 6.2229€ | ||||
| Total cost for 10 robots | 44.235€ | ||||
| Total cost for 100 robots | 309.35€ | ||||
| Battery excluded |
Programming
Chosen Microcontroller: Pi Pico Zero
Chosen Communication technology: RFID
GitHub puzz robot: https://github.com/SophiagDotart/puzzlingRobots
Storage and transport
Link to initial documentation, images, and files
Download links to files:
- Download: Puzzling robot storage and travel box SVG
- Download: Placeholder values Box Puzzling Robots
{kind=link}
Requirements:
Inside box
Requirements:
- Stable enough to carry a bit of weight
- Allows to comfortably carry the box
- Have a lid to insert and remove puzz robots with ease
- Does not need to be changes in size -> no need for removable connection
- Super nice to have: water protecting attribute
Inside box
Requirements:
- Comfortably fit 10 puzz robots
- Protect robots from damages due to impact
- Super nice to have: charge batteries when robots are stored
User Interface
New idea: have collectible RFID Cards (with designs) that just have to be held near a robot to play.
If I actually write another website or app I'll announce it here. Until then: this would be the background. It shows many puzzling Robots from above in changing colors.