Fab Academy 2013 |
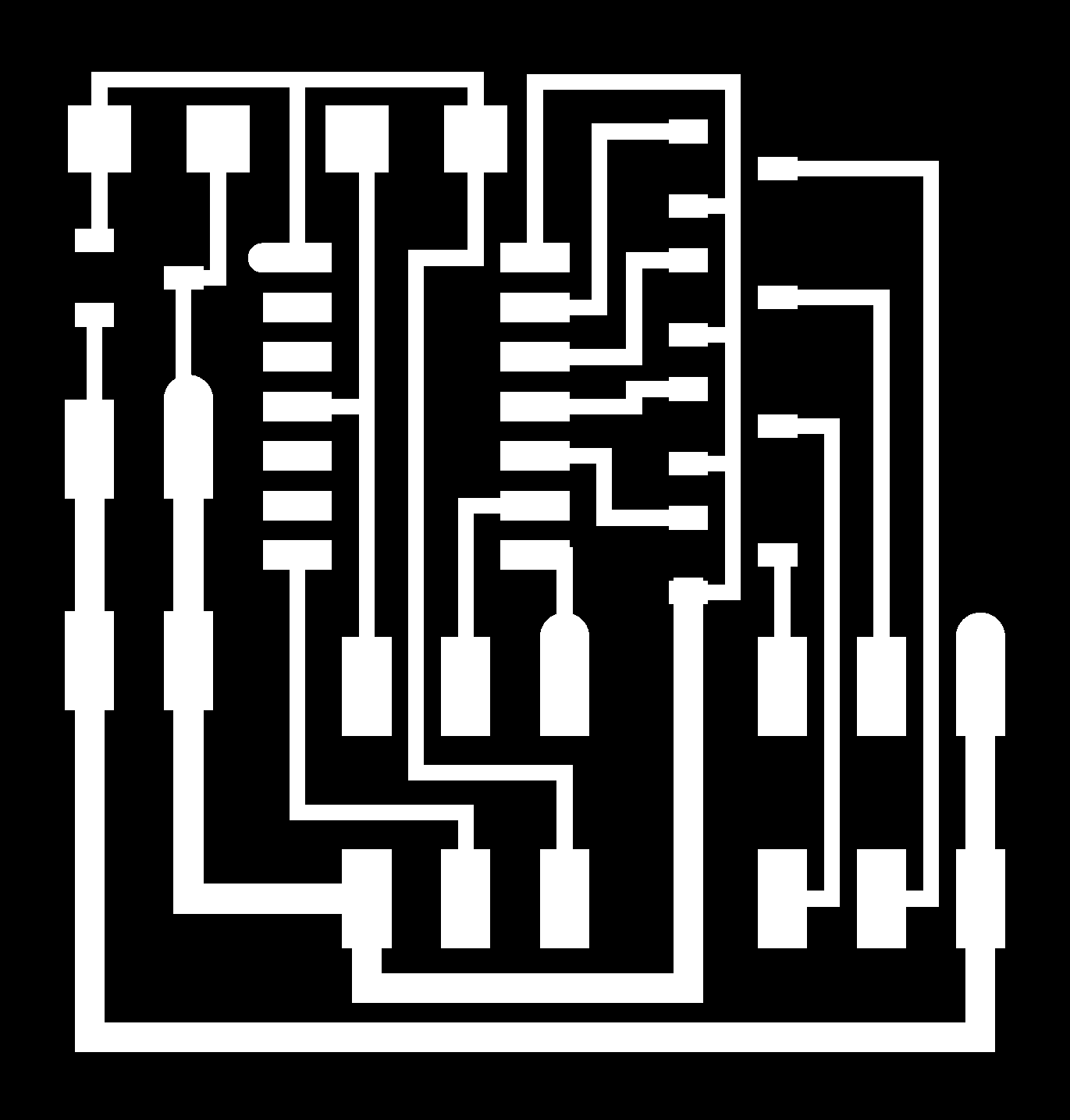
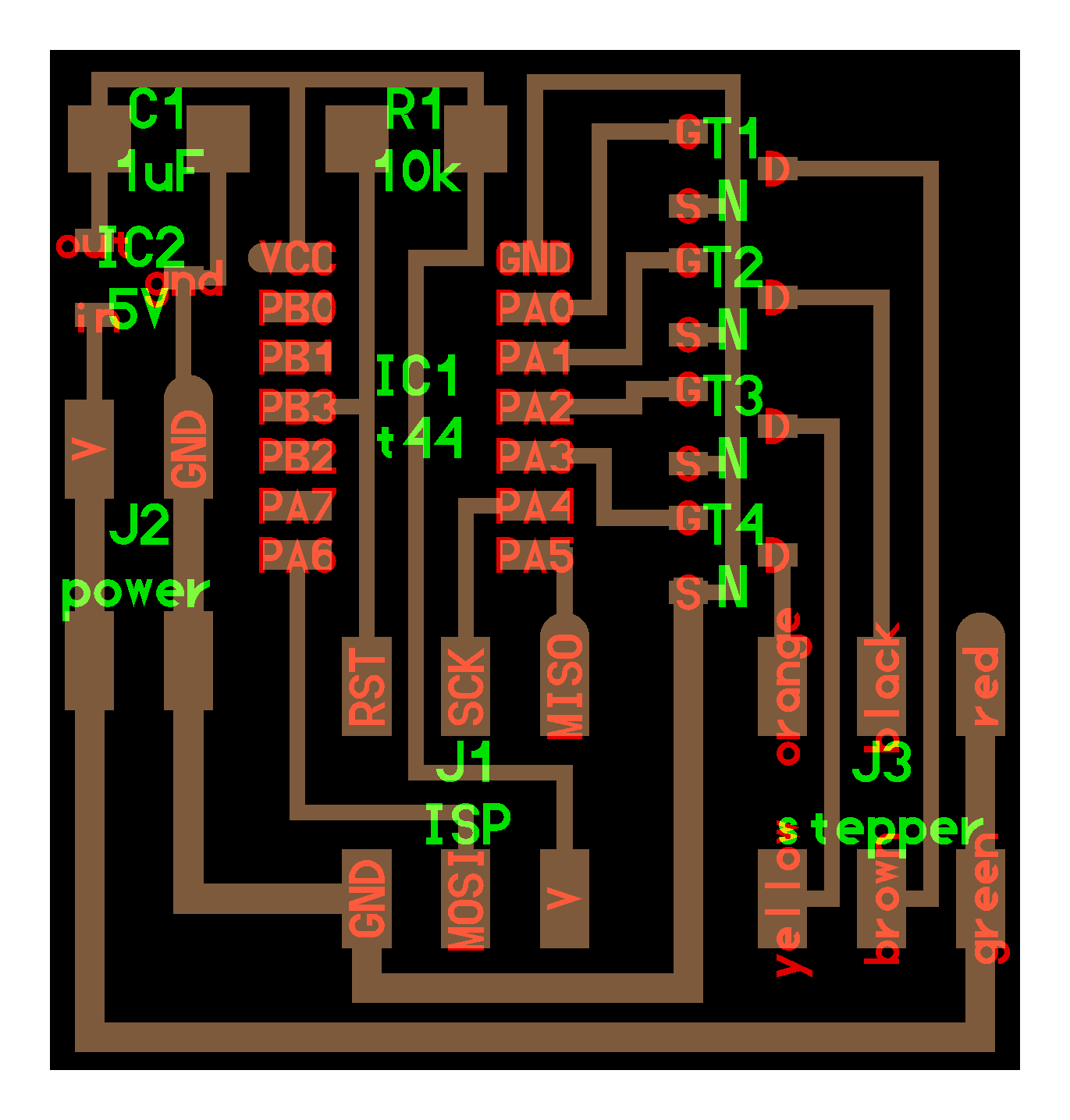
Output DevicesFor this weeks assigment, we were told to add an output device to a microcontroller board, and then program it to do something From the provided examples, I decided to use the unipolar stepper motor. I loaded up the traces and interior boards into the Fab Modules and milled out the board on the Modela. I've gotten pretty familiar with this workflow, so it was a fairly easy process.After soldering (and scrounging around the lab to find the parts) everything on (using the board layout provided), I hooked it up to the FabISP and a 9 volt battery to program the board. There wasn't enough space on the board to hook up the stepper motor and the FabISP at the same time, so I was going to program it, unhook it, test it and if it wasn't working, hooking it up again and starting over. I started out with the Wave makefile, and again used the FTDI programming example from Embedded Programming to program the board. There's no external crystal on this board, so I didn't have to make the fuses.
To connect the stepper motor to the board, I had to change the way it connected slightly. It came with a 6 pinned connector which are in one row, but the connector on the board is 6 pins in two rows.
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}