12. Mechanical Design¶
The machine¶
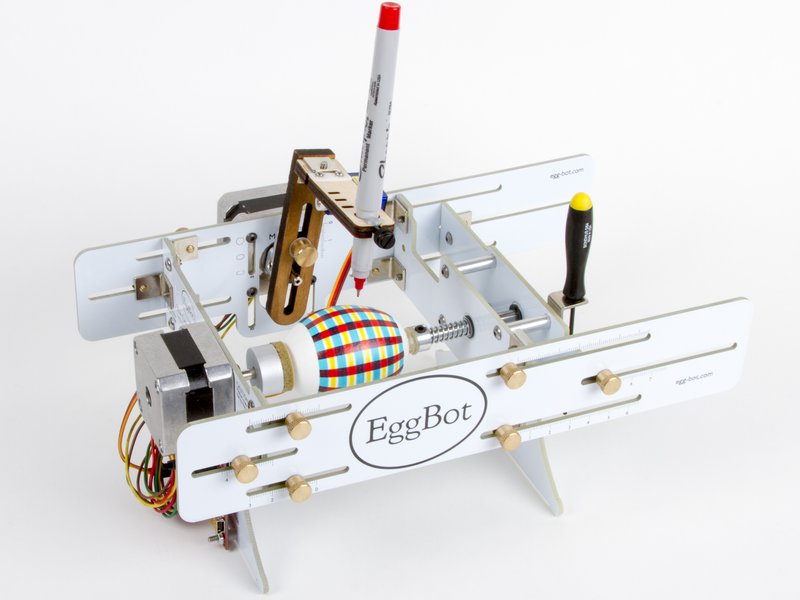
The idea came from Toni Kyllönen, as he was inspired to build something like an EggBot, which is a machine able to draw simple deigns on egg shells.
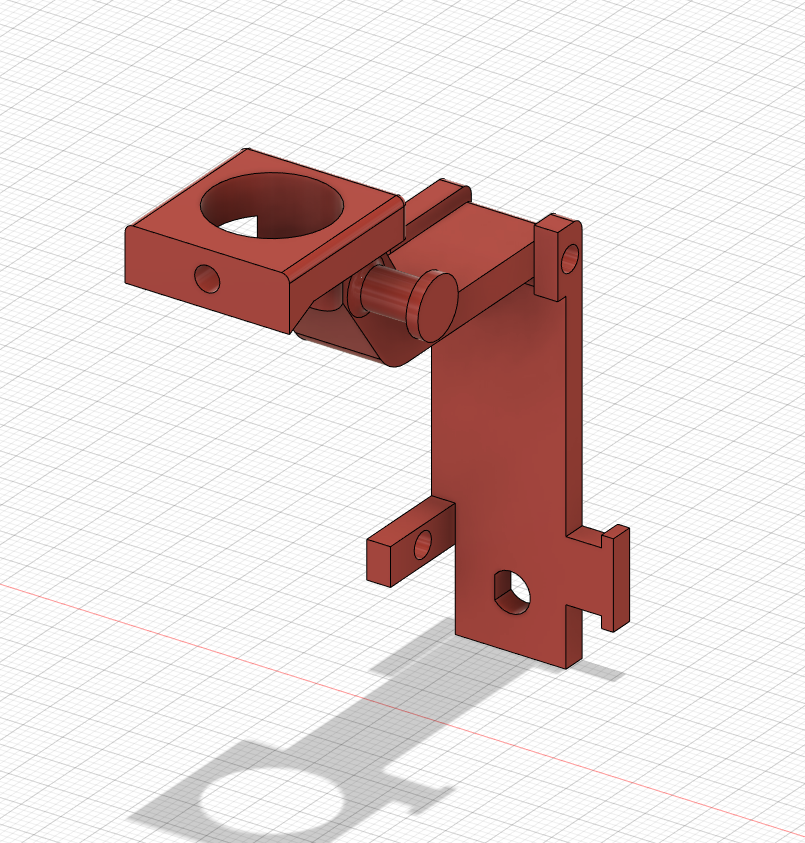
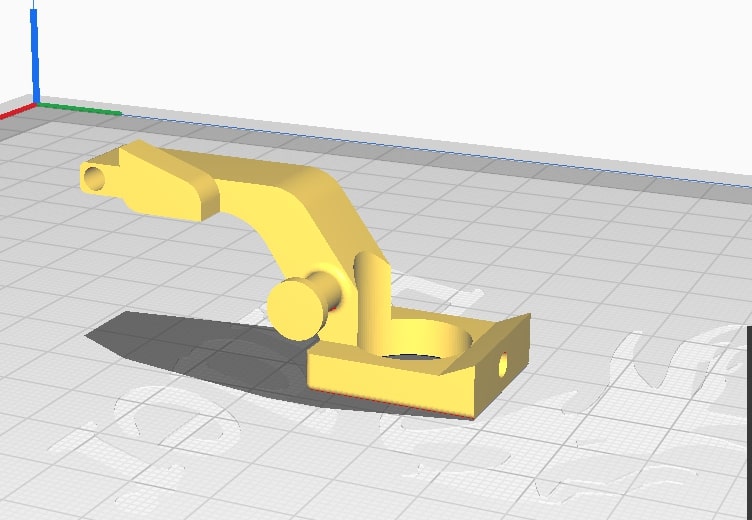
My main contribution was designing the arm that would hold the pen/marker in position, and rotate it using a servo. I designed this using Fussion 360. It is desgined to use common M3 Screws.
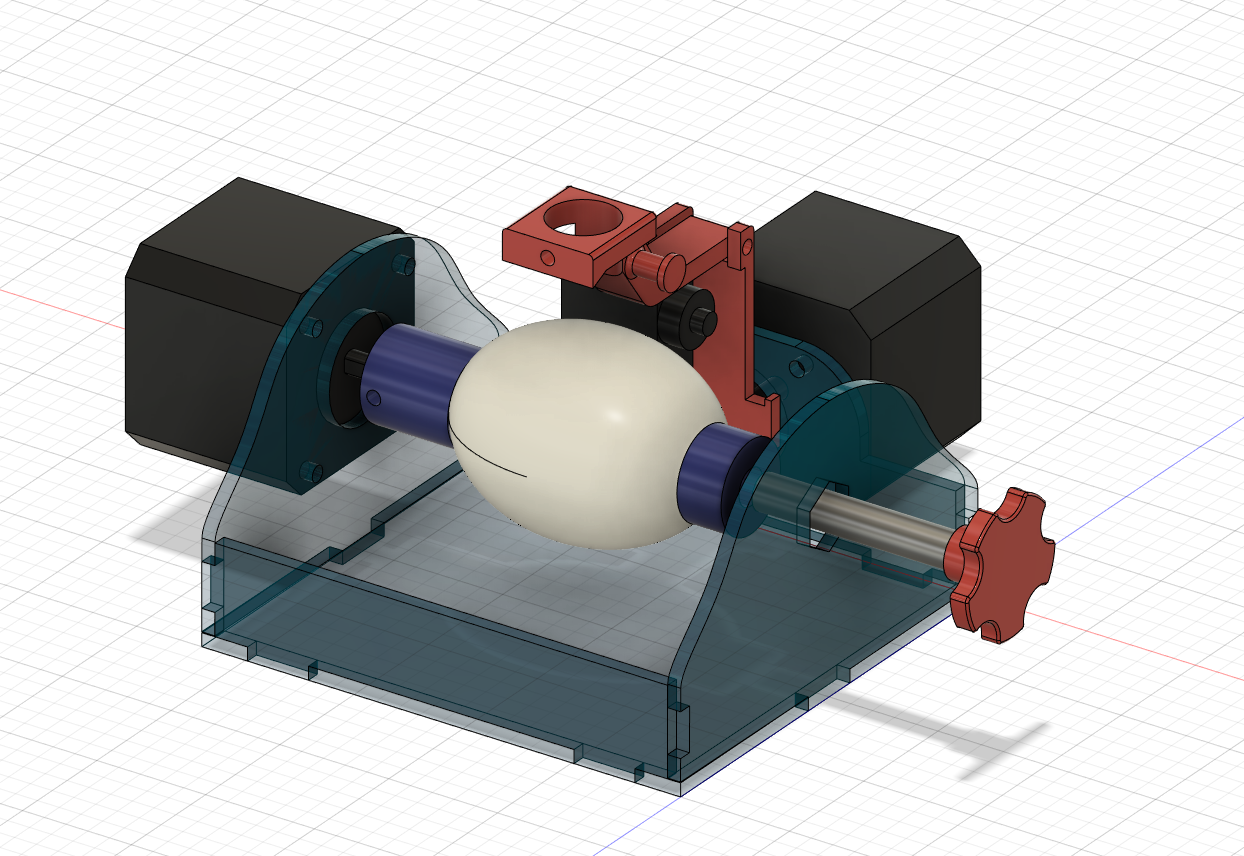
This is the design of the whole machine. It can be viewed/downloaded here.
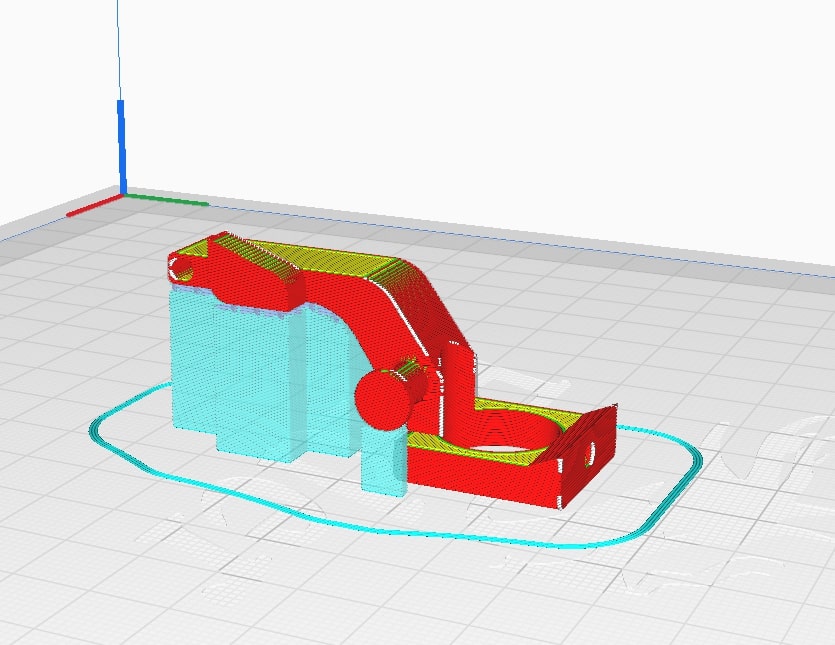
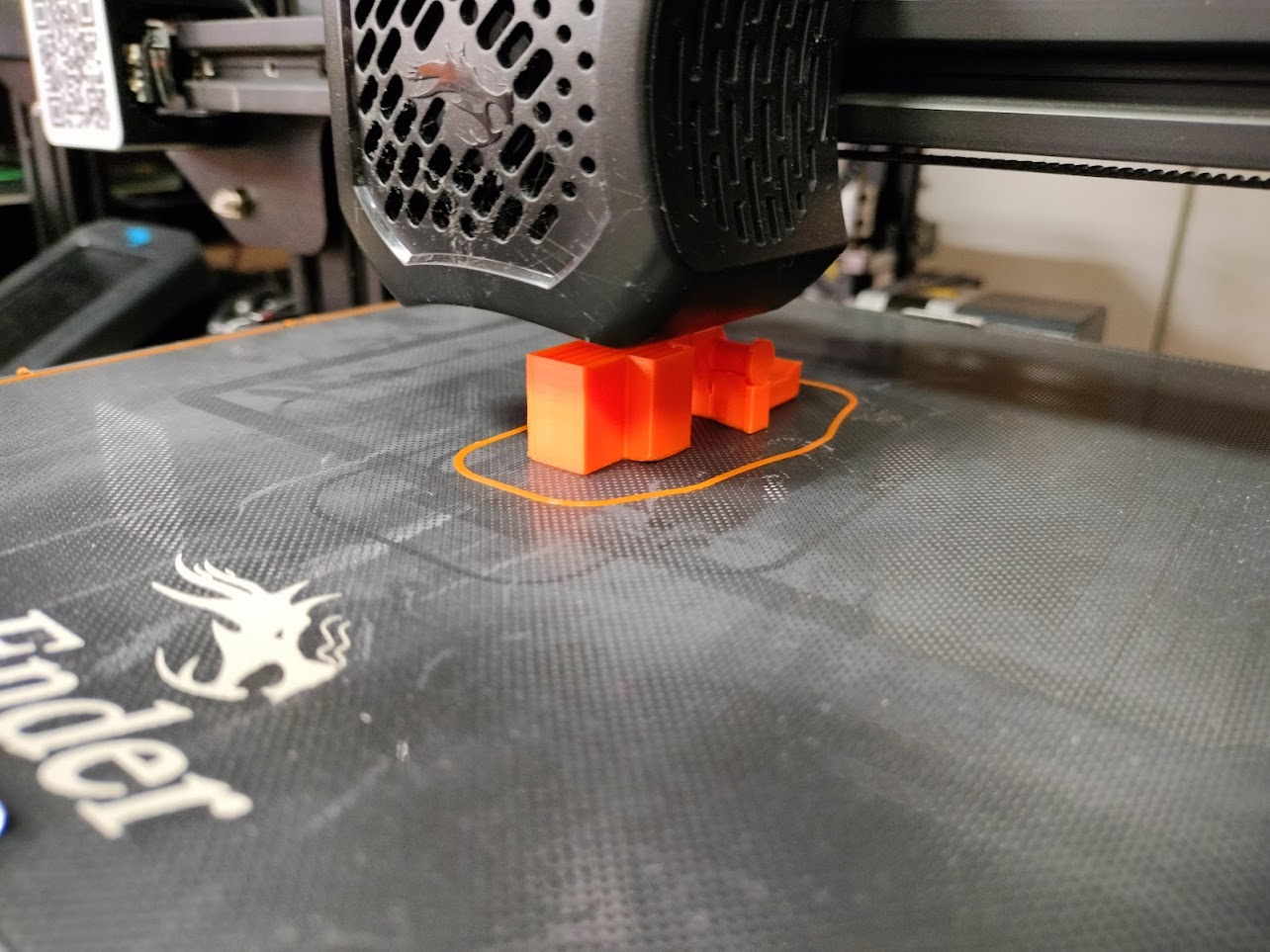
The body was sliced with a 0.2mm layer height and 10% infill.
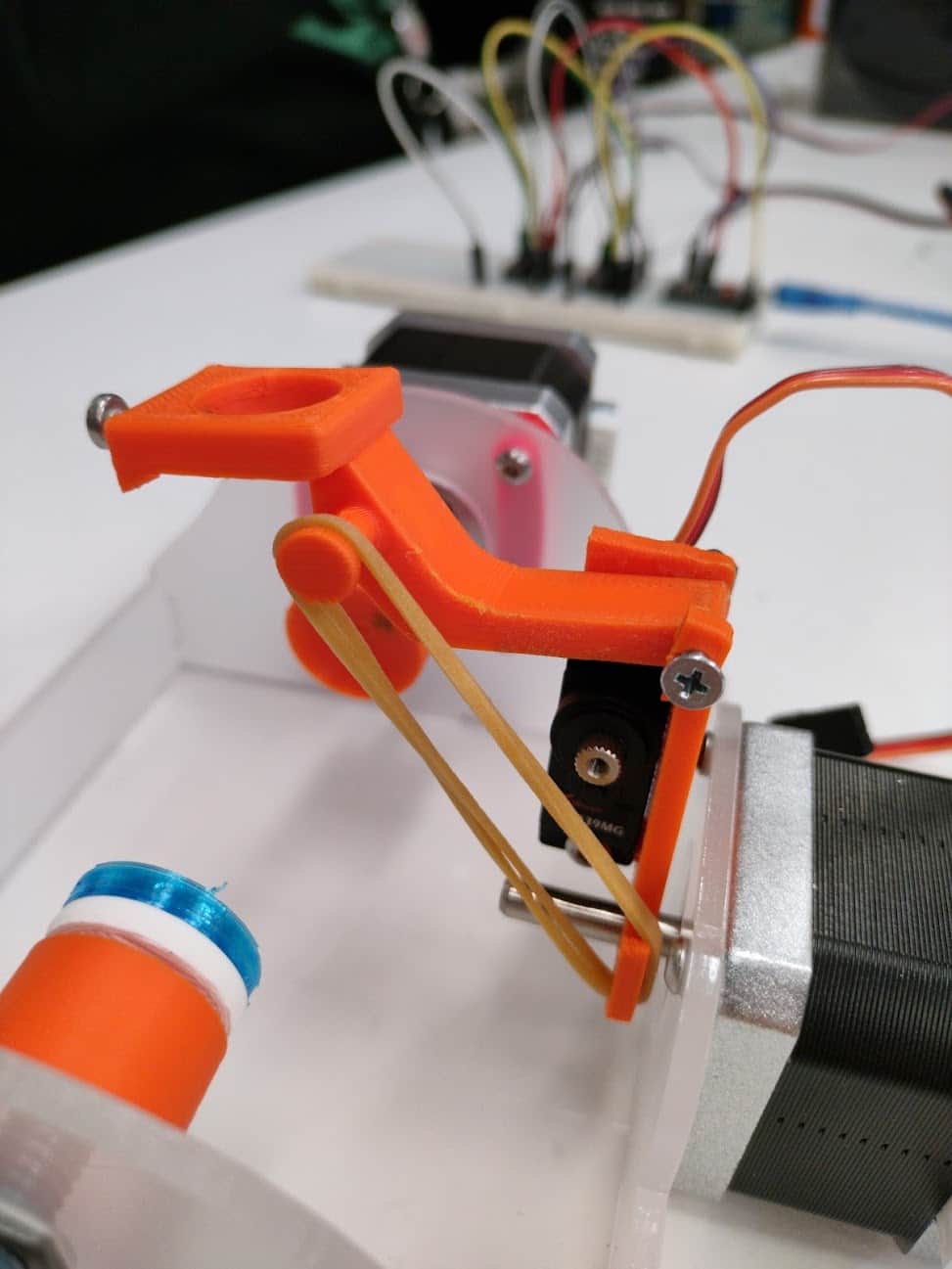
This is how it looked when assembled.

When trying to use the machine, we noticed that the egg was not being held onto very well as bare pastic was quite slippery, so we decided to reprint one of the holders using two different mterials for different layers [missing].


And the result:
Final result¶
A more comprehensive descripåtion of the machine can be found here