1. Principles and practices¶
This assignment meant to present an idea for the final project that will be presented in the end of the FabAcademy course.
Autonomous and Intelligent Robotic Arm¶
The idea of the final project for the Fabzero course is to design a robotic arm that is able to recognize an object and take it automatically. The arm will drop this object off in a place to be defined later (it can be a constante place or a variable setup by the user). This project differs from the existing ones because will integrate a camera in the the robotic arm and use artificial intelligence to recognize the desired object to catch. Attaching the arm in an autonomous vehicle will allow it to move in the environment to catch the desired object and also to drop it off in a desired location. This arm could be used in healthy care to locate and bring a medicine without the need of the patient to move and to look for it.
This project is split in five main parts. Some of them has sub tasks to make it easier the design of this project.
- Design the robotic arm.
- Start with an arm with two points of movement.
- Include as much point of movement as necessary.
- Design a mobile app.
- Design the image recognition.
- Design the mobile vehicle.
- Integrate all parts together.

Design the robotic arm¶
This step intends to design a prototype of the robotic arm that will be used in the next steps. It is an essential step, since the next steps rely on the quality of the movement of the arm. The circuits to move the arm should be designed in this step as well.
Design a mobile app¶
Although this is another step, it is very connected to the previous one. This mobile application will send the commands to the arm to move. Then, we can prove the utility of the prototype of the robotic arm. The mobile application will not be part of the final solution, since the project aim an automatic robotic arm.
Design the image recognition¶
Image recognition play an important role in this project. It will be necessary to attach the camera in the arm and use it to capture images from the enviroment. A state-of-the-art object detection algorithm will be used to process the images and identify the desired object.
Design the mobile vehicle¶
The autonomous vehicle will enable to move the arm in the environment capturing pictures and identifying the desired objects to catch. The mobile application might be used here as well, to prove the vehicle works as it was expected.
Integrate all parts together¶
After all steps done, it is time to assemble the robotic arm and the vehicle and start the tests in a real scenario. It seems a lot to do in one semester, but the idea is to develop as much as possible, applying the concepts learned in the course.
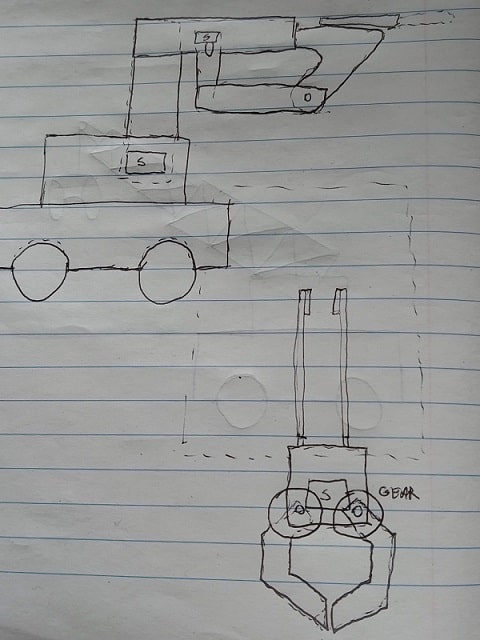
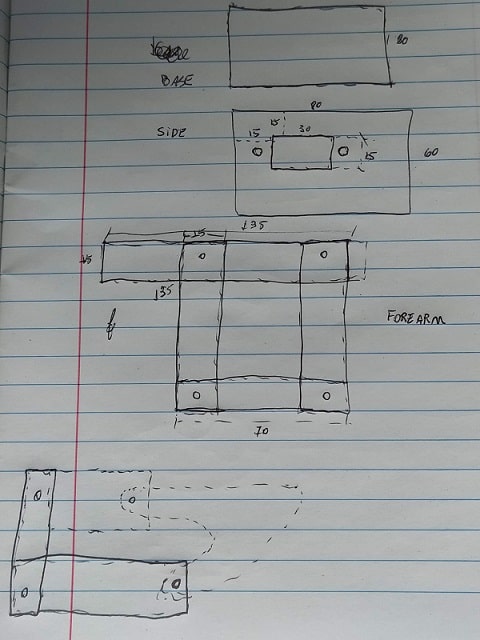
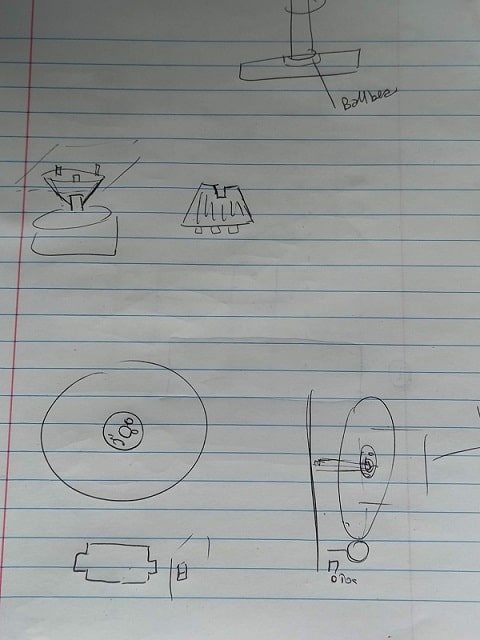
Sketch of final project¶
First step of the project I made some drawings on how I thought it would look like the robotic arm. From this drawing, I could design the first prototype of the arm.