14. Applications and implications¶
This week we have to describe our project in more detail for the final project.
Assignment¶
Propose a final project masterpiece that integrates the range of units covered, answering :
- What will it do?
- Who's done what beforehand?
- What will you design?
- What materials and components will be used?
- Where will come from?
- How much will they cost?
- What parts and systems will be made?
- What processes will be used?
- What questions need to be answered?
- How will it be evaluated?
Your project should incorporate
- 2D and 3D design,
- Additive and subtractive fabrication processes,
- Electronics design and production,
- Embedded microcontroller interfacing and programming,
- System integration and packaging
Where possible, you should make rather than buy the parts of your project
Projects can be separate or joint, but need to show individual mastery of the skills, and be independently operable
My first idea¶
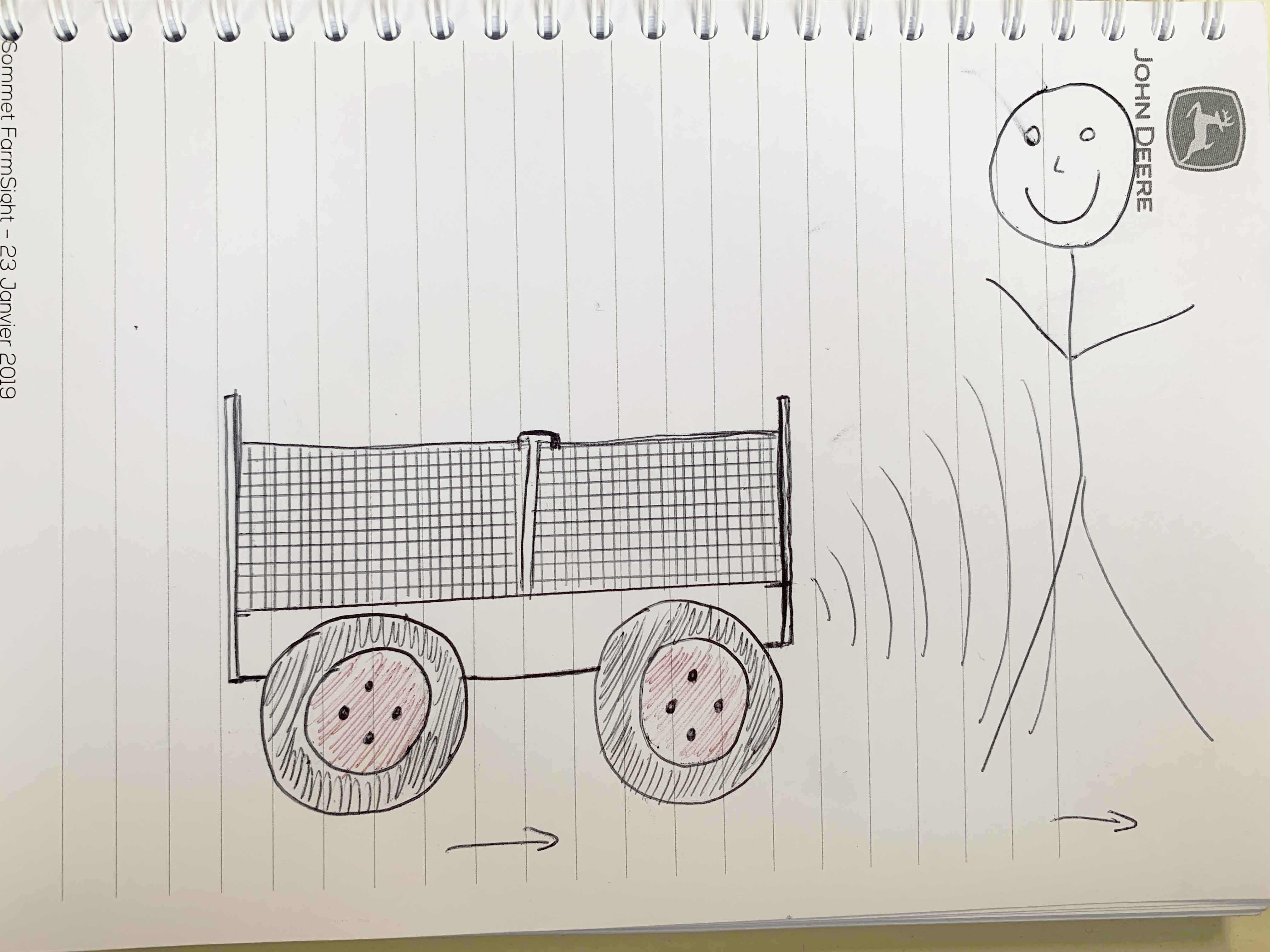
I come from the agricultural world. Regularly we have to carry heavy things. In order to relieve our health I would like to make for my final project a trolley that follows the user. Here is the first picture of my project :
Where did I get this idea?¶
The idea came when I was working with my brother. My brother was building his gate and we had to keep going back and forth to get tools from the workshop. At first we used a wheelbarrow but it was too small, so we couldn’t fit much inside it, so we had to make several trips. Moreover we loaded the wheelbarrow and it was heavy. So that day I thought it would be interesting to create a wagon big enough to store and transport tools. Then the idea that this trolley would be a follower came up in order to have my hands free.
What will it do?¶
This robot will help farmers to move heavy stuff without any effort on their part. My robot can carry a maximum load of 100kg. Once loaded, all you have to do is turn on the system, stand in front of the pixycam and move forward. The robot will then follow the user and you will be able to move your loads without risk to your health. Of course this robot is versatile, it can also be used for other professional activities that carry heavy loads (mason, roofer, market gardener …).

Who has done what beforehand?¶
This system already exists, the company EFFIDENCE has already put these person-tracking robots on the market. This company has developed a person tracking system based on laser technology. Their robots are also very versatile and can be found in logistics companies or in the fields.

What will you design?¶
My wish is to design a robot that is more specialised for the agricultural world and that can move on all terrains. It will be equipped with 4 drive wheels and the whole robot will be waterproof. The possibility of changing the top platform by just unscrewing a few bolts will allow my robot to change its configuration in just a few minutes. The structure will be mainly made of metal. The protection plates will be laser cut for more precision and will be equipped with a seal.
About the boards, I will make the motor control board with several transistors to send the power to my motors.
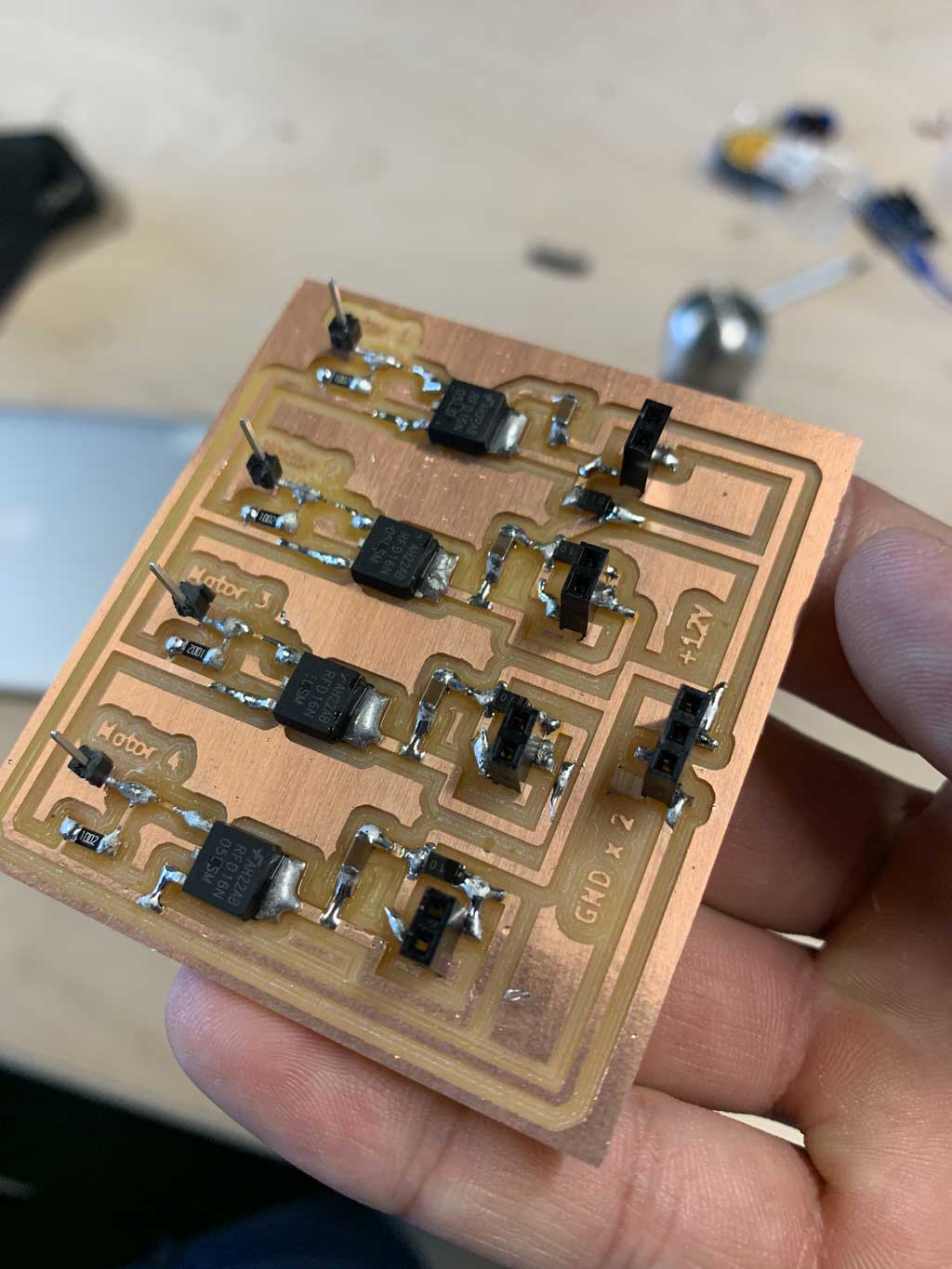 Board realized during the output week. Click here for more information on how to make this board.
Board realized during the output week. Click here for more information on how to make this board.
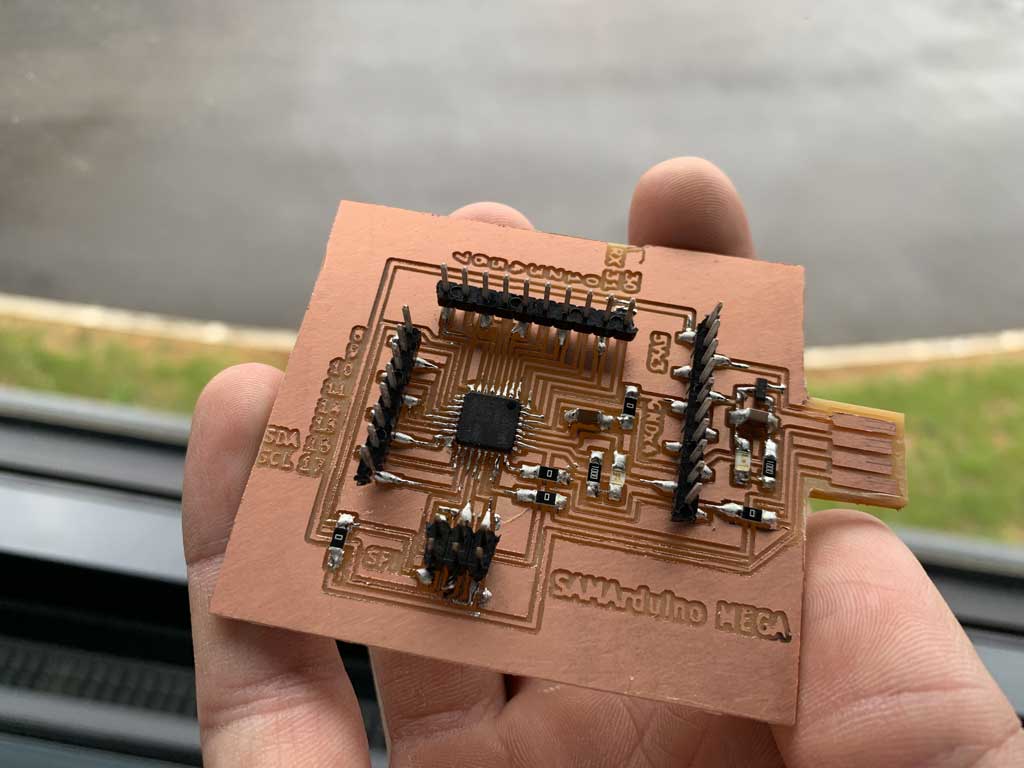
As for the microcontroller, I chose to use a SAMD21 that I have already made in the past weeks. The advantage of the SAMD21 is that it has enough memory capacity to support the pixyCam but also to control my motors and the ultrasonic sensor.
What materials and components will be used?¶
Concerning the materials I will use, I will take metal. To make the structure of my robot I will use 40mm x 40mm tubes to be strong enough to support the load. I will also take 1.5mm thick protective sheets to close the whole robot.
As for the components, I will use a PixyCam2 for colour recognition. The PixyCam2 has the advantage of recognising several colours very quickly. I decided to use pink as a colour to follow. Pink is a colour that is not easily found in nature. As my robot is meant to move around outdoors, it is important to choose a colour that is not common outdoors.

To limit the risk of collision I will use an ultrasonic sensor. I took advantage of the Input week to discover this sensor which has a precision largely sufficient for my use.

For the motors, I ordered powerful motors so that they could transmit an important force to make my robot move. My project being to transport a heavy load, I need power to make my robot move.
 Credit : Phidget
Credit : Phidget
As for the batteries, my motors being 24V 6A I will use 2 car batteries of 12V and 36Ah. These batteries will allow me to have a sufficient autonomy and will be able to provide a necessary power for my motors.
 Credit : Norauto
Credit : Norauto
To transmit the power of my motors I need good wheels. The wheels are important, they are in contact with the ground and allow the robot to move forward. Moreover, the bigger the wheels are, the more they are able to overcome obstacles. But in the case of a farm, it is likely that there are small stones to cross, a fallen branch for which it is necessary to pass above… it is thus for that which I wanted wheels of a large diameter. I decided to take rubber trailer wheels for the grip with a large diameter for the adherence. My choice is turned on wheels of 350 x 8.
 *Credit : Master accessoires
*Credit : Master accessoires
The wheel axles will be made of metal and will be supported by two bearings. I will use a metal lathe to reduce the diameter of my axles to the desired size.
Where will they come from?¶
The majority of the parts will be ordered on the internet from several websites. Regarding scrap metal, living on a farm, we have a lot of scrap metal, so I will recycle this unused metal. As for the sensors and electronics, all of these components are in the FabAcademy inventory.
How much will they cost?¶
What parts and systems will be manufactured?¶
All the metal parts such as the robot body, the upper platform, the wheel axles and the protective plates will be made by me. The electronic boards to control my robot will also be made by myself. The protective box for the PixyCam2 and the ultrasonic sensor will be printed with a 3D printer and the plans will be made by me.
What processes will be used?¶
3D printing, laser cutting, PCB machining, electronic design, electronic production, input/output week and programming.
What questions need to be answered?¶
My robot has to meet a growing demand to make things to improve the working conditions of workers. It must therefore be easy to use so that everyone can use it. In addition, it will have to answer an important question in the agricultural sector, it will have to be solid to support a large load.
How will it be evaluated?¶
If it is able to follow a person and have a 100kg load on it then it will meet my expectations and can be evaluated.