Task To Do:
- Plan and make a machine. Document the group project and your individual contribution.
Group Project-
MACHINE DESIGN
Make a MACHINE-
This is the second week in which we have to actuate and automate our machine.
Considering my background, I'm agriculture engineering. So, this week of make a machine is really beyond my league. but I want to learn the electronics part. So, I decided to help Arefin for selection of motor, wiring part,etc. Also I made design for fixing the electronics stuff like drivers, etc.
Initially we decided to make electronics part ready, while the arm was being ready. simultaneously the mechanical and machine work is going on....
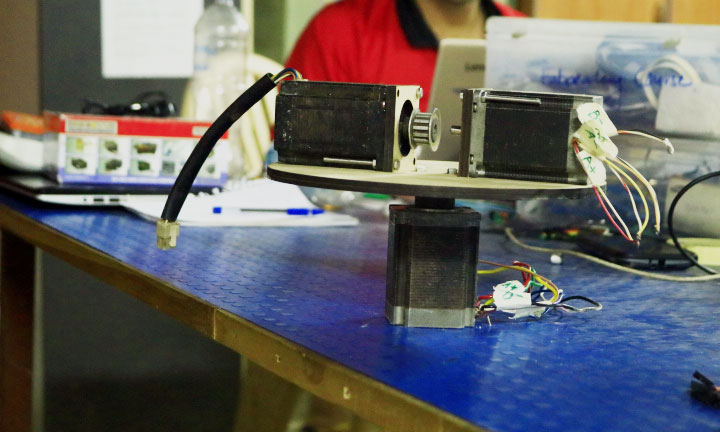
For this, we get 6 motors from our lab. So, we have to check them.
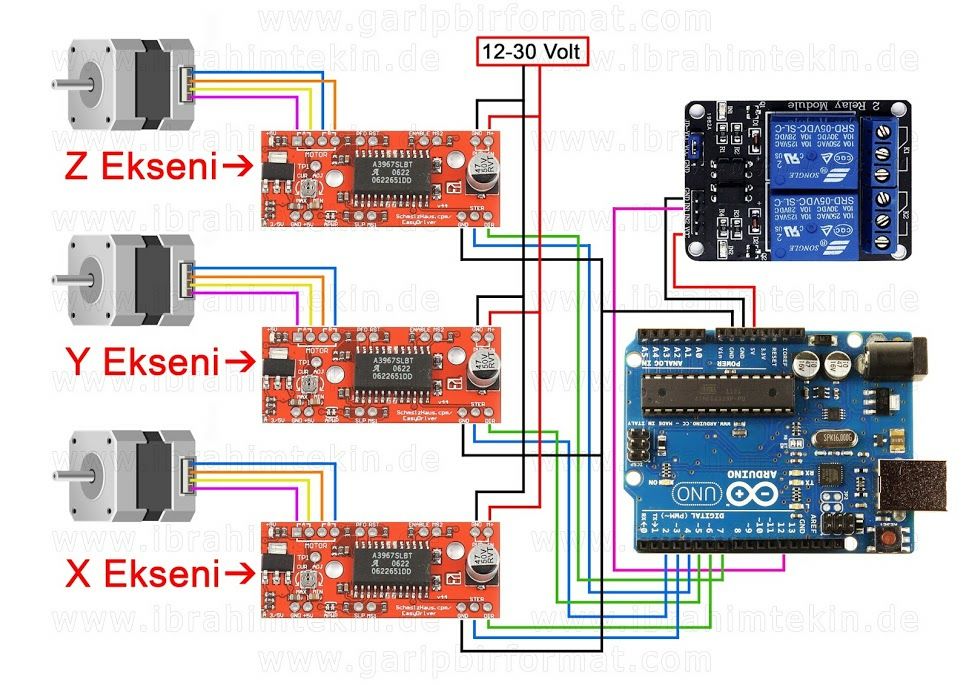
we went with the software named as GRBL Gru, this is again a software used for X-Y plotters.
So we followed the schematic as seen here..
Luckily 3 motors i.e NEMA24 are in working condition.
we decided to use inverse kinematics for the interfacing and the motion of the arm. So, we modified the designs and took MEARM as a inspiration.
After this we cut the acrylic parts and assembled the arm.



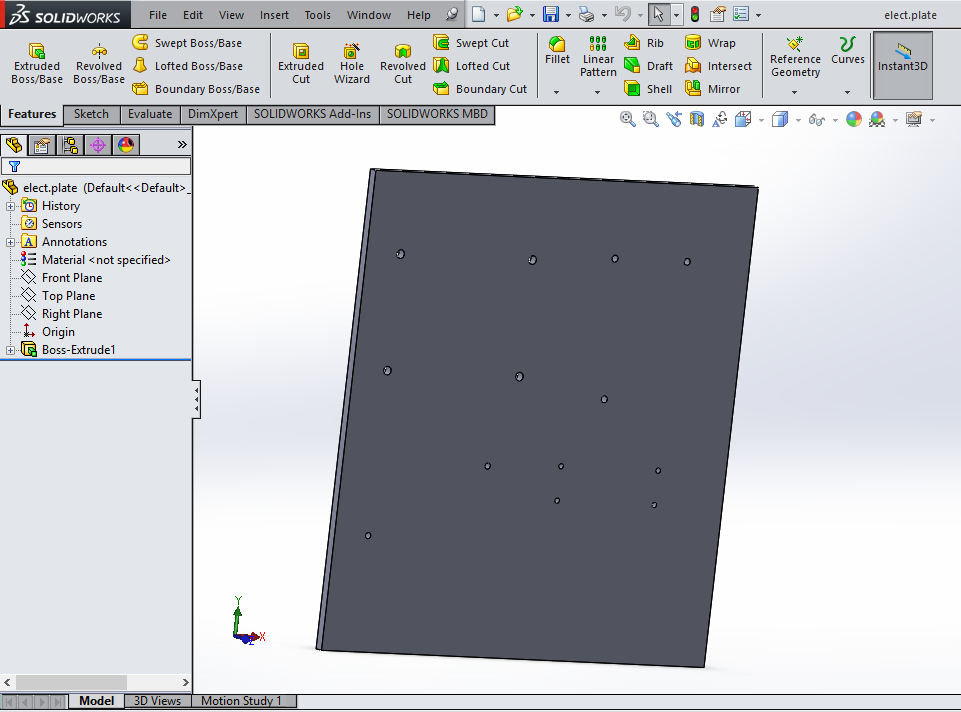
Now we are going to operate it via programming language. Before going for operating we have to complete the electronics part. For movement in X, Y, Z axis we are going to use three stepper motor called NEMA 34. We follow below images diagram for wiring motor with driver.
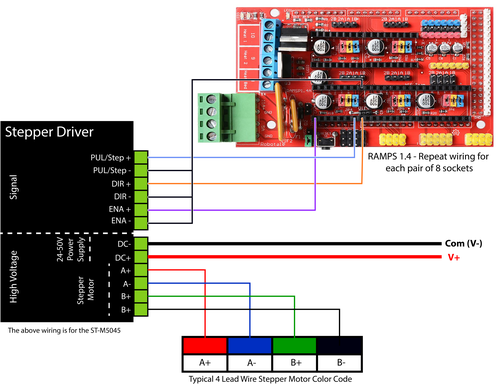
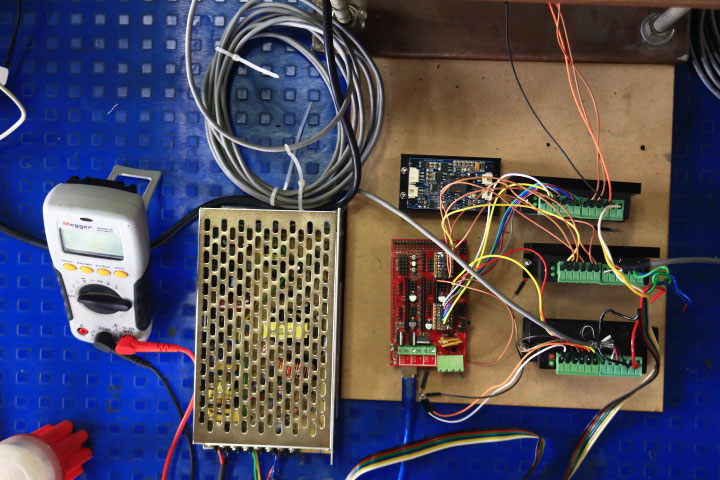
Then me and kamlesh move towards electronics part. We understand the total electronics part from arefin. For controlling the motor we used TB6600 stepper driver with RAMPS shield board of Arduino Mega 2560. The finally we use three motor NEMA 34 + TB6600 Driver+ RAMPS 1.4+Arduino Mega 2560. I made MDF plate for placed the all drivers and electronics stuff....
Then me and kamalesh did all the connections or wiring as follows:

For controlling the motor, we used Marlin Firmware for controlling the stepper motor as redial degree instead of co-ordinate system. Marlin is working with Python GUI/Processing GUI or JAVA GUI. we used Pronterface (Windows Based) GUI for controlling the Stepper motor.
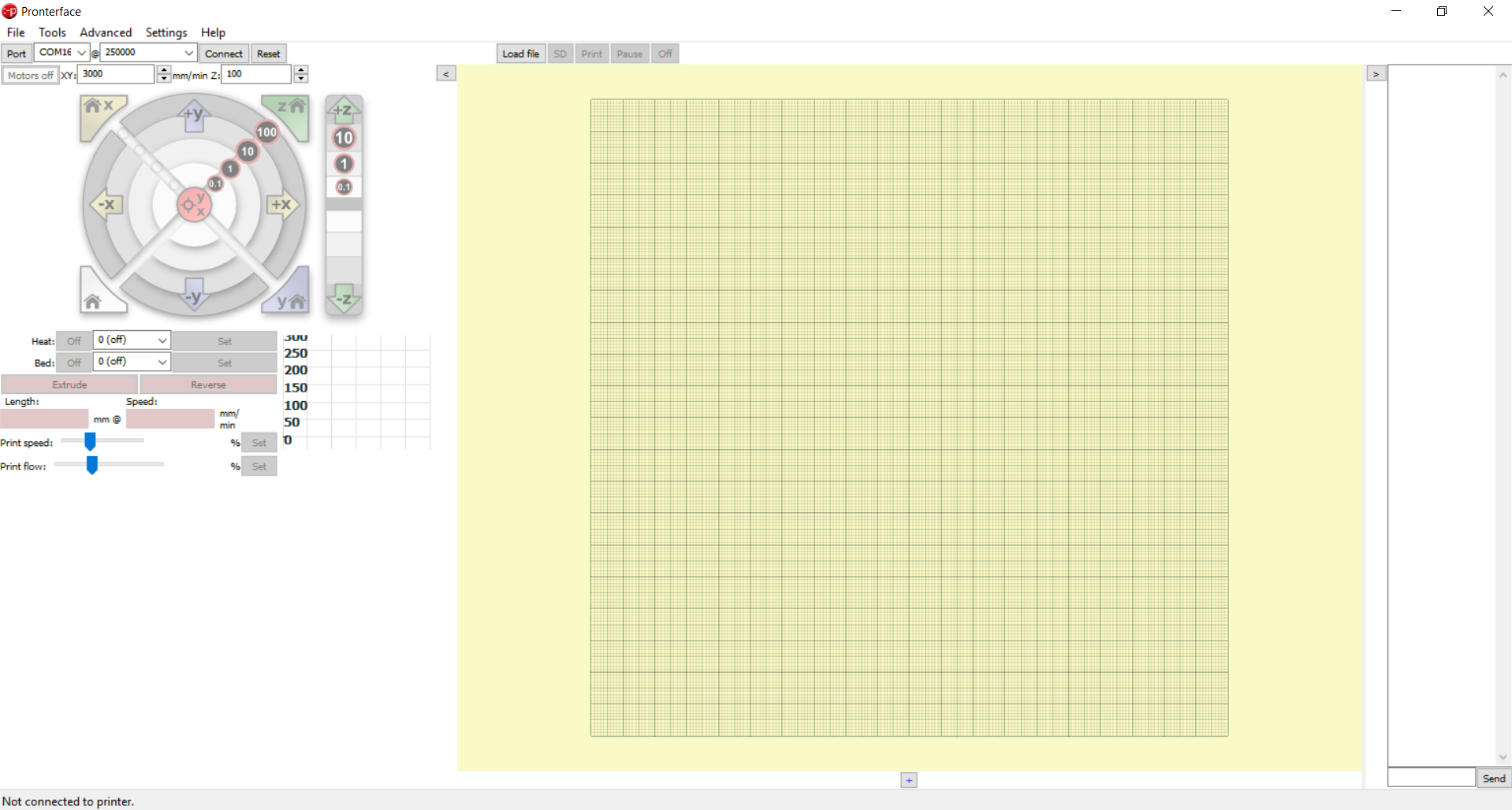
everything is done...!!!
The working mechanism of the arm as follows:
Future Scope:
Possible improvement for interfacing using robo language, interfaced with superior hardware and softwares such as RoboDk
And many more possibilities flow along with the creativity....
The project page for arm can be found here
The files for arm can be downloaded here