Powertrain Assembly
Part One
Many people I know, among friends and classmates, live at a distance to the university that is far enough to find walking from home everyday a bit tiring, but close enough that riding a car or using public transport is simply overkill or out of their reach. And sure, biking could be the all-in-one solution, if only memories of toppling over on two wheels didn't keep you awake at night. Yep, we're looking at you, the 'I never really got the hang of riding a bike' club..
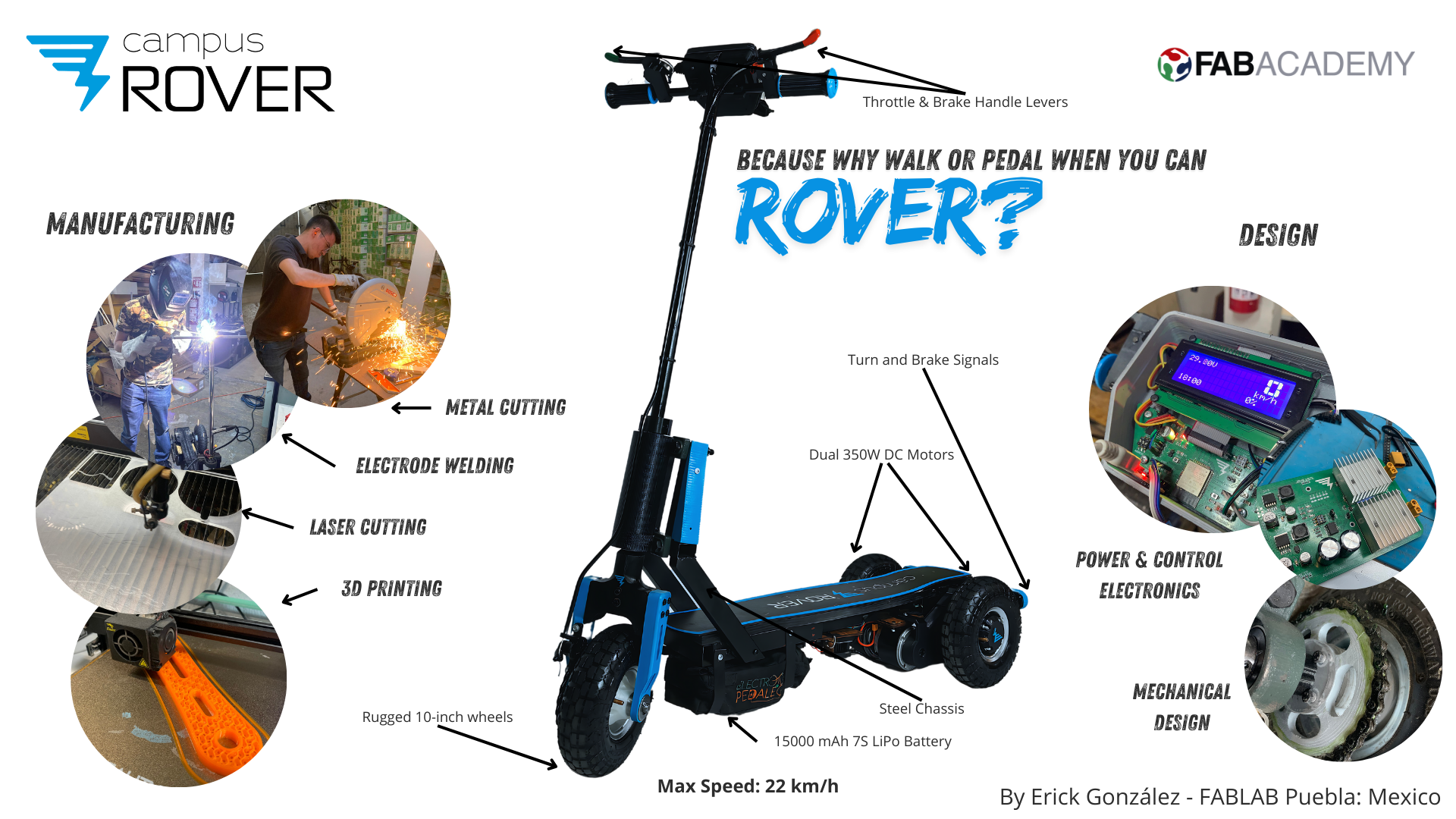
But what if there was a way to zip to campus in style, with a ride that's as easy to use as pushing a button? Imagine a vehicle that glides more smoothly than a bike, with intuitive handling that makes learning a breeze. Picture this: a ride that's not just convenient and cool but also potentially free. Enter "CampusROVER" – an electric scooter designed with you in mind. It's not just a way to get from point A to B; it's your new best buddy for those campus commutes. Effortless to ride, easy on the planet, and engineered for the buzz of campus life. Because why walk or pedal when you can ROVER?
While the "CampusROVER" brings a playful ease to campus commuting, the project is rooted in serious research. In the next section, we dive into the studies and engineering behind this final proyect proposal.
The first step of the proyect was to get to know more about the commuting habits of our student community, but in a manner that is not intrusive to everyone's privacy and time. That's why I wrote a simple survey using Microsoft Forms, that only contained 4 questions and a text box for additional comments/opinions on the proyect. The questions and their options (translated from spanish) were the following:
The survey reached a total of 157 people in the span of 8 hours using Facebook, representing about 9.5% of the total student population, people from virtually every faculty and background present in the university. The results of the questions are summarized in the following graphics:
In the following graphics is visible the data distribution for the first question, on the right we can see how many students live inside and outside a 2km radius from the university, and on the left, we see the population inside the 2km radius, divided in smaller categories.
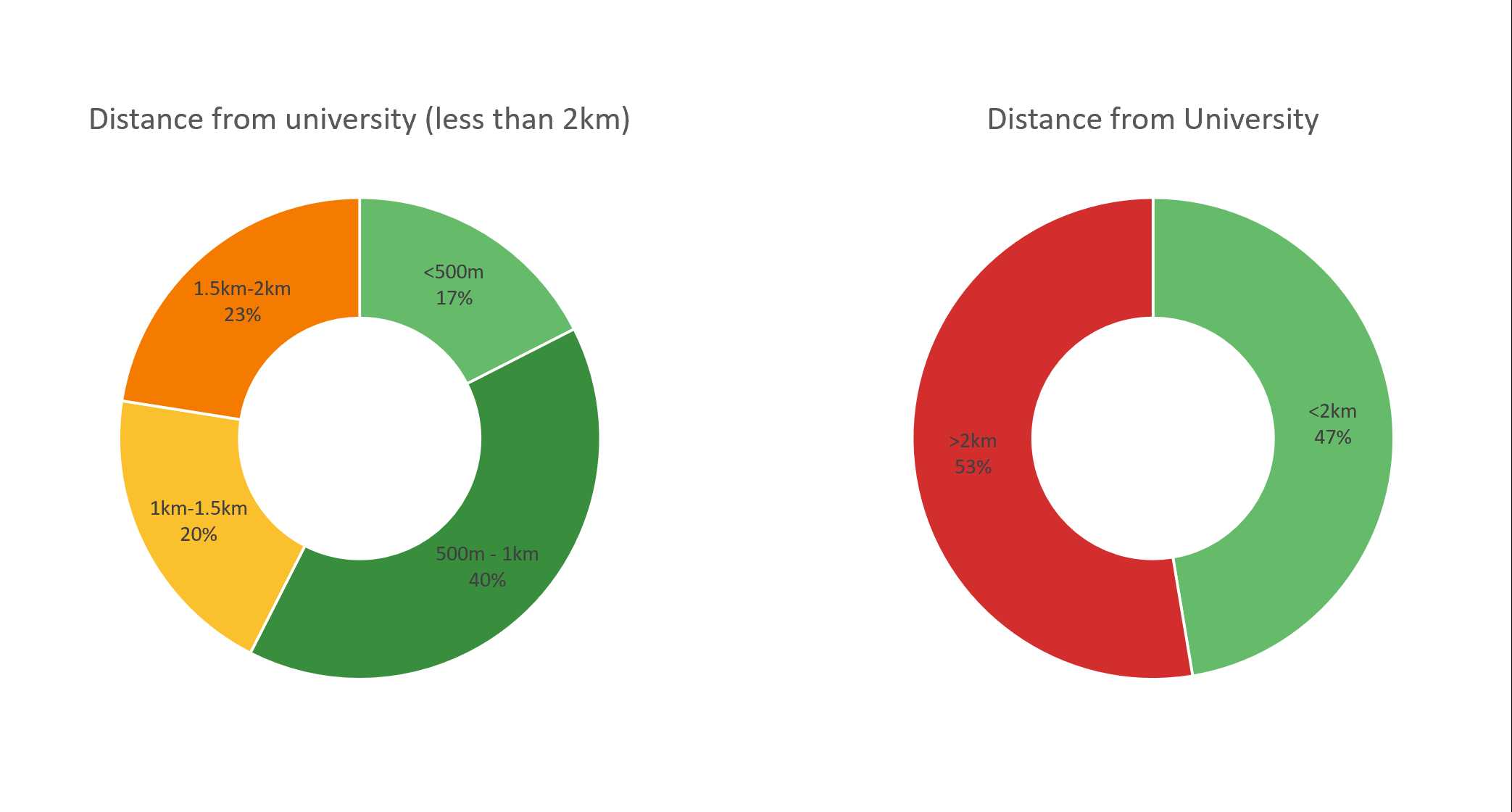
From the data we learn that a significant amount of the student population surveyed, lives inside a 2km radius, being a good approach to try giving the scooter at least a 4km autonomy (distance of going home, and back).
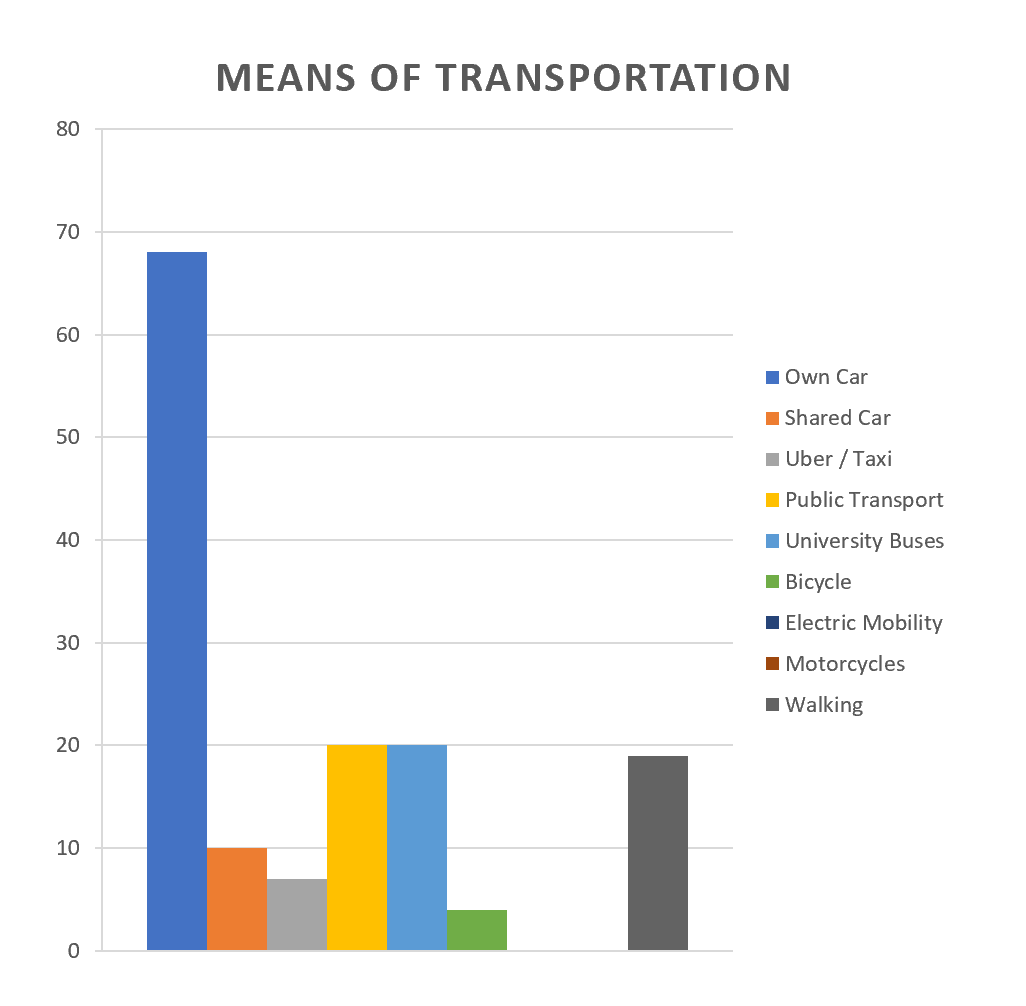
From the leftmost graphic, we learn that the community of IBERO Puebla relies heavily on automobiles for commuting, and though the campusROVER may convince some car drivers from switching sides, it is certainly not the main goal of this proyect to attend that demographic, instead, it should aim to provide a commuting alternative for those who don't rely on cars.
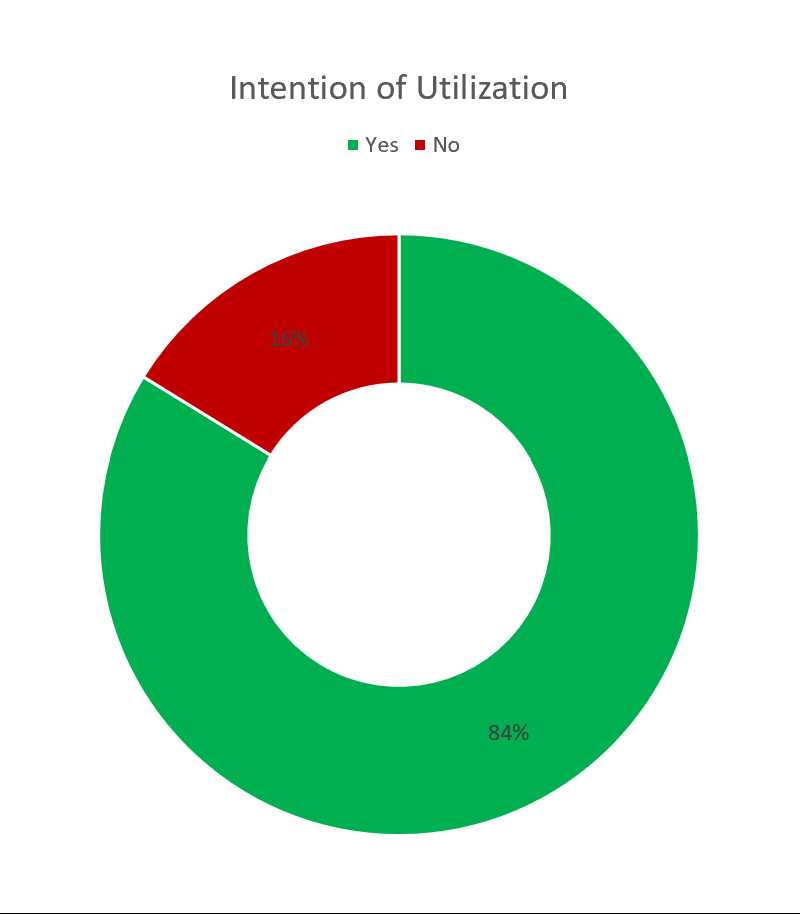
In the center pie chart, we can see a very positive intent of utilization, meaning that many people might be eager to use the campusROVER as their commuting option, data that may shine a light of hope on convincing car drivers to leave their car at home.
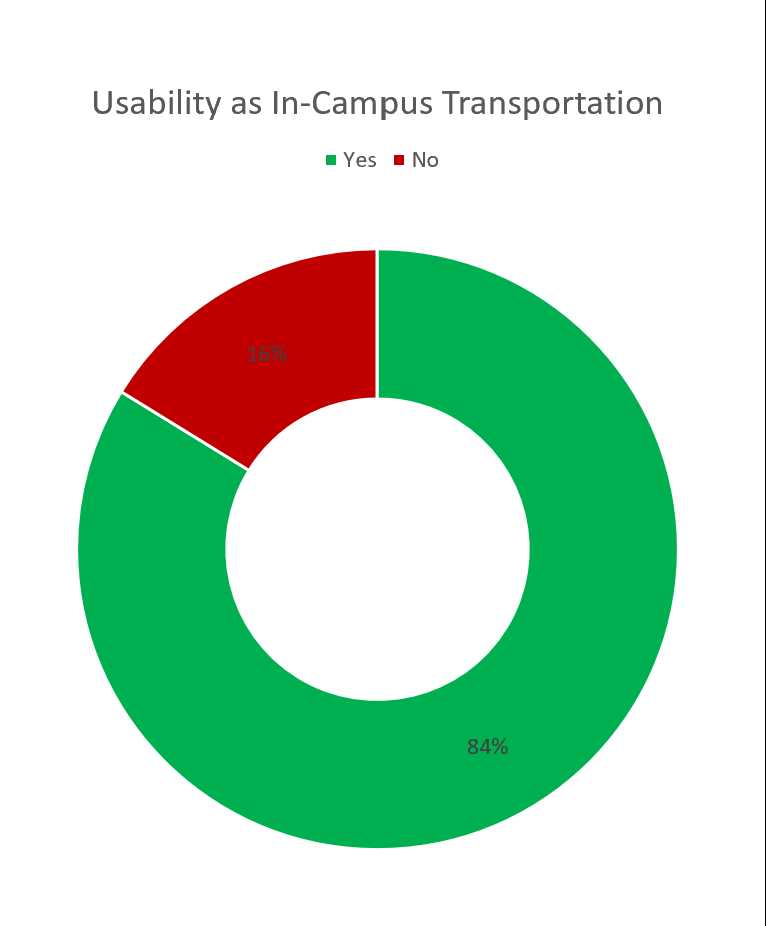
Last but not least, we have the rightmost graphic, which makes a proposal for also using the campusROVER as a mean of moving inside the campus, idea which seems to have a high level of acceptance.
IBERO Puebla is surrounded by state-owned bicycle lane infrastructure, but I didn't really knew how it worked, what areas / routes it covered, or in which condition they are. Because of that, an in-depth research on the nature of that infrastructure was necessary, in order to understand how could it be used in favor of student mobility using the campusROVER. User safety has to be at the core of this proyect, and bicycle lanes are a fundamental part of that: The campusROVER has to be designed to harmonize with the existing bicycle lanes, minimizing interactions with larger, heavier, and faster modes of transportation that could pose a threat to the safety of the people who use this alternative.
In the diagrams below, I superposed four radii measuring the ranges mentioned in the survey centered around the college campus, meaning that at least 47% of the student population lives inside the red circle. This area is serviced by two main branches of the bicycle lane network available in the city one of which directly connects to the campus' main entrance, both elevated and ground level lanes are available, being the latter preferable due to minimized interactions with other vehicles. This infrastructure combined with low-traffic roads communicates most of the housing developments inside the red circle, developments where students are more likely to live.
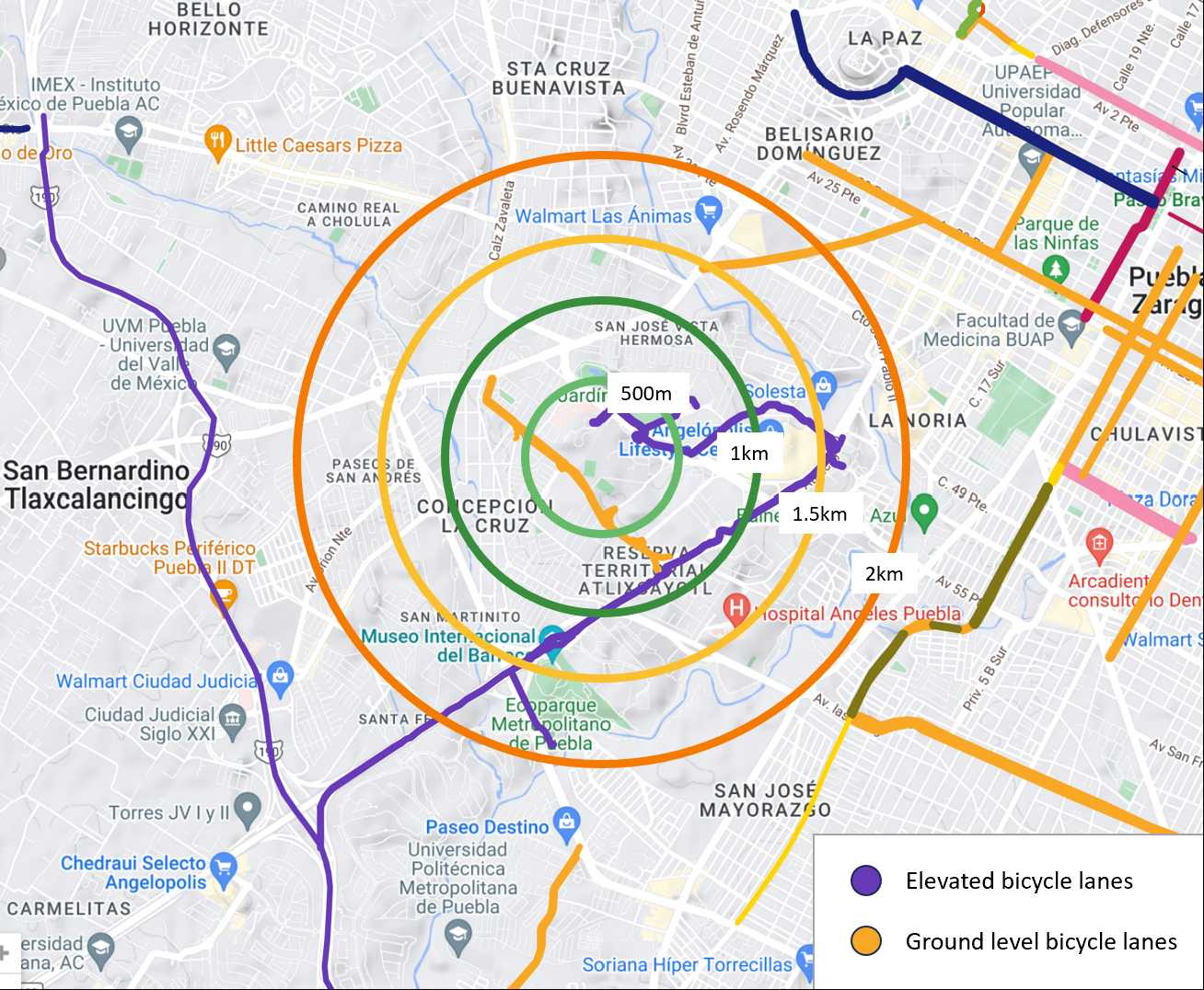
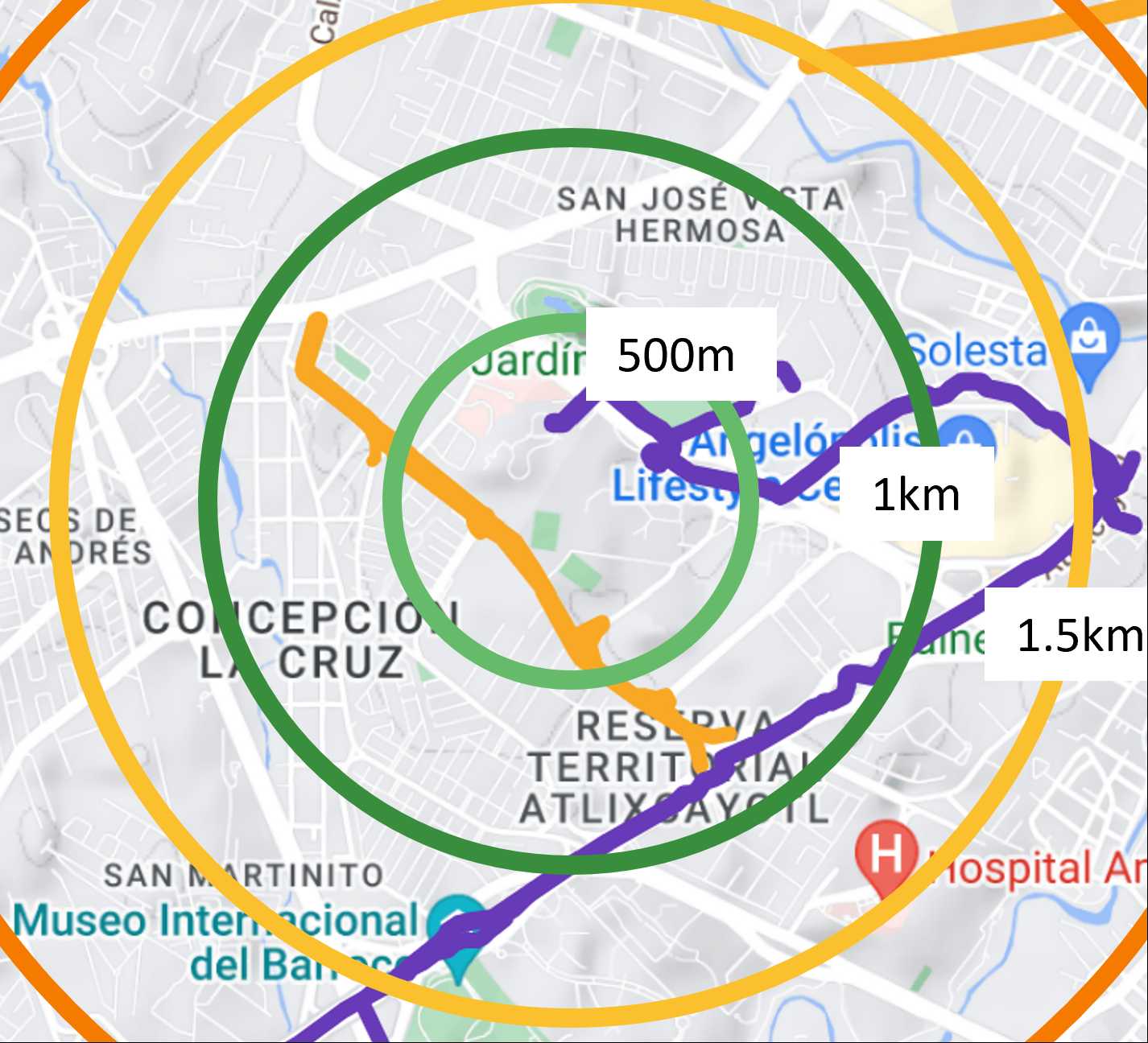
The condition of this infrastructure and the surrounding roads its a different story: While the elevated lanes tend to be in very good condition, the lanes on the ground level and the complementary low-traffic roads are not. Potholes, dirt, rocks, terrain irregularities and other obstacles are common along the route. As someone commented on the survey:
So if I pretend to bring a viable solution to the table, the campusROVER should be capable of dealing with this obstacles while being comfortable to ride.
Knowing the before mentioned context I started skecthing what I believe might be a good approach to the problem:
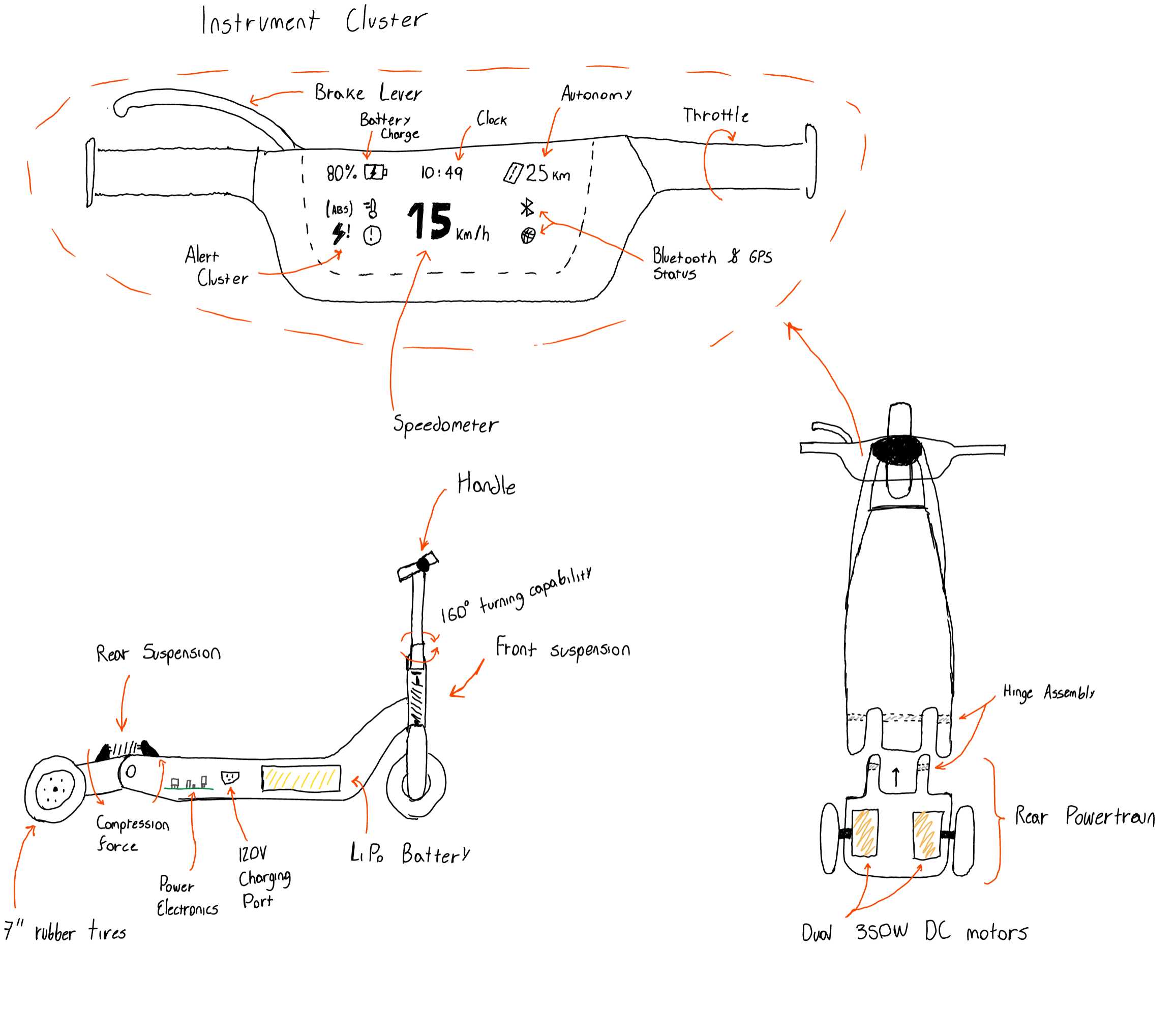
The campusROVER then, has to be able to reach the following requirements:
Please feel free to navigate through the categories and check what I have done for each of them!
Part One

Part Two

Part Three
Part Four
Part Five
Download all final proyect assets here!