Week 10: Output devices
Group assignment:
Measure the power consumption of an output device
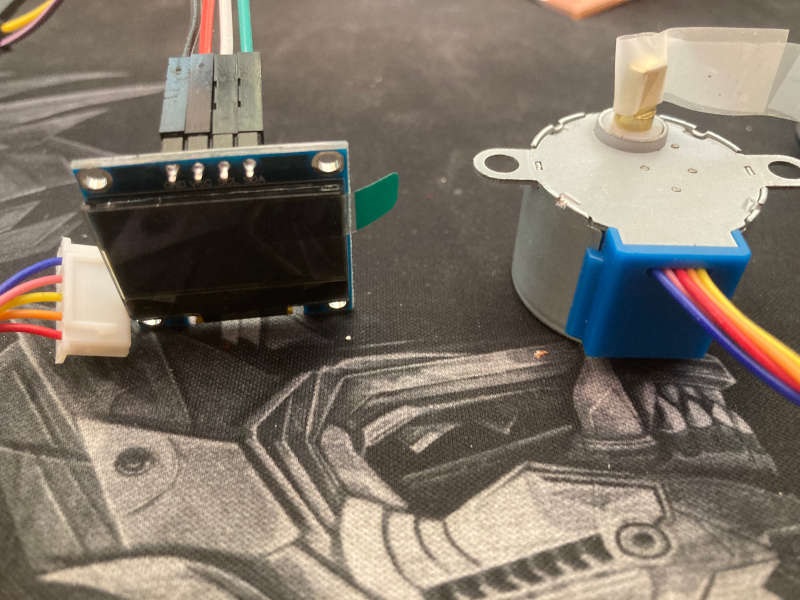
My fabmate Pedro Chana and I measured the consuption of the ATtiny1614 board and the OLED display. You have it here.
Measuring the power consumption of the BLDC motor for my final project
Dealing with high power BLDC motors and Lithium batteries requires a good control of the current and power consumption. If you don't control them properly it can harm the motors and the battery.
So I made a first test of the BLCD motor, connected to a power supply. This way I know that the current is going to be limited by the supply.

As you can see, the currents goes up to 3 amps (on the display of the power supply), so the power consumption is 36V x 3 amps= 108 W. The battery I'm going to use is able to supply 30 amps, so the power will go up to 1 KW.

Finally, I connected the BLDC motor to a battery (limiting the current to 1 amp), and I measured the current with an ampere meter clamp. It says 0.96 amps.
Individual assignment:
Add an output device to a microcontroller board you've designed, and program it to do something.
SAMD11 board controlling stepper motors
Two weeks ago I made a general purpose SAMD11 board and I'm using it to control some external devices. I programmed it with the boatloader, so I could program it directly through the USB port. Here is the detail of the board production.
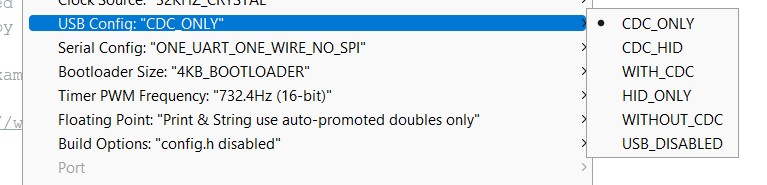
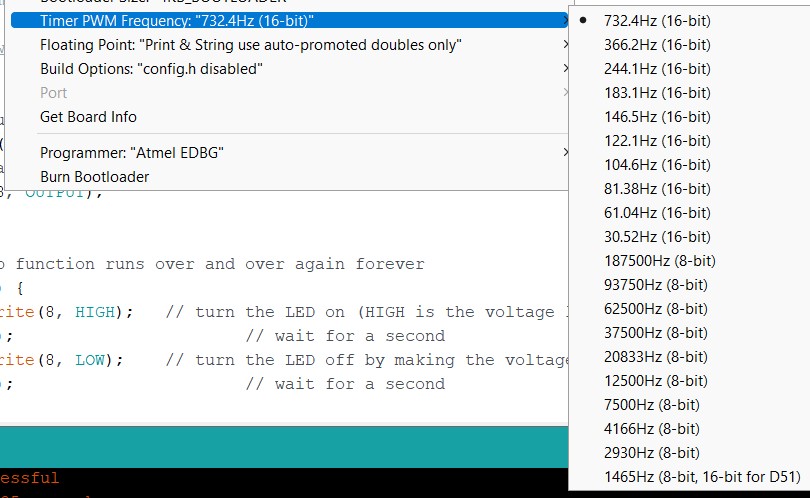
So, first thing, I checked the programming of the SAMD11 from the Arduino IDE through the USB port, selecting the following parameters:






I programmed a simple led blinking program to check everything works:
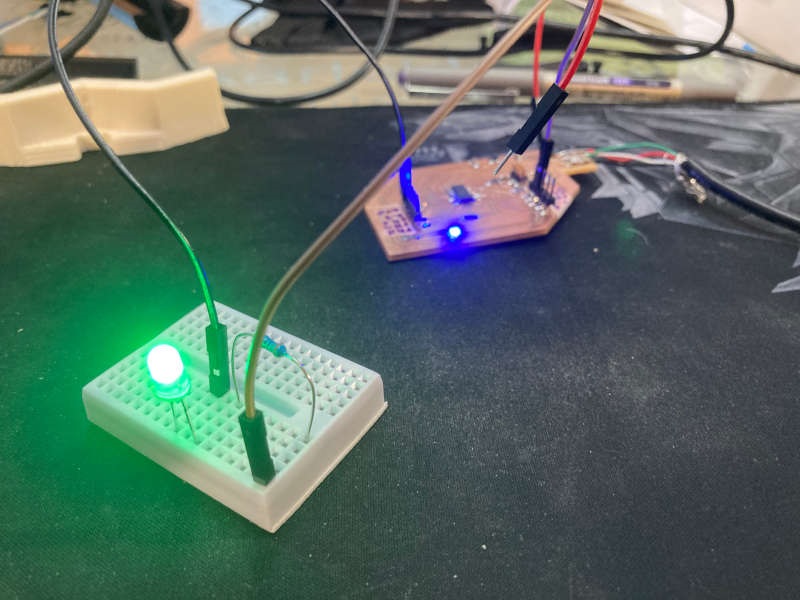
It worked well, with external and internal leds, so I went on to program an output device, a stepper motor.
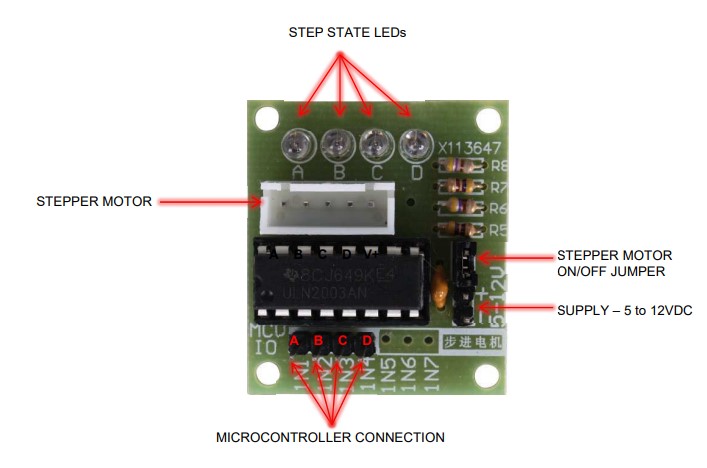
I had a simple stepper from an Arduino kit, the 28BYJ-48, a low cost unipolar motor:


SPECIFICATION
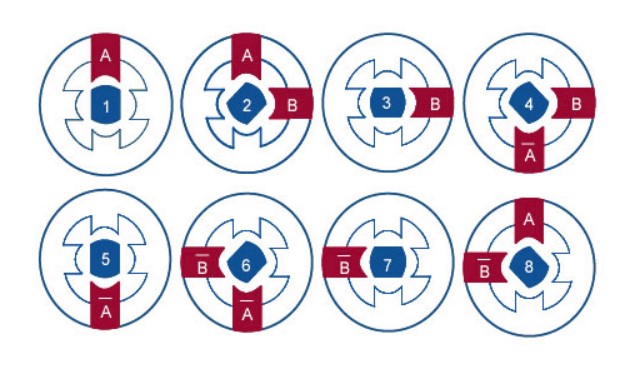
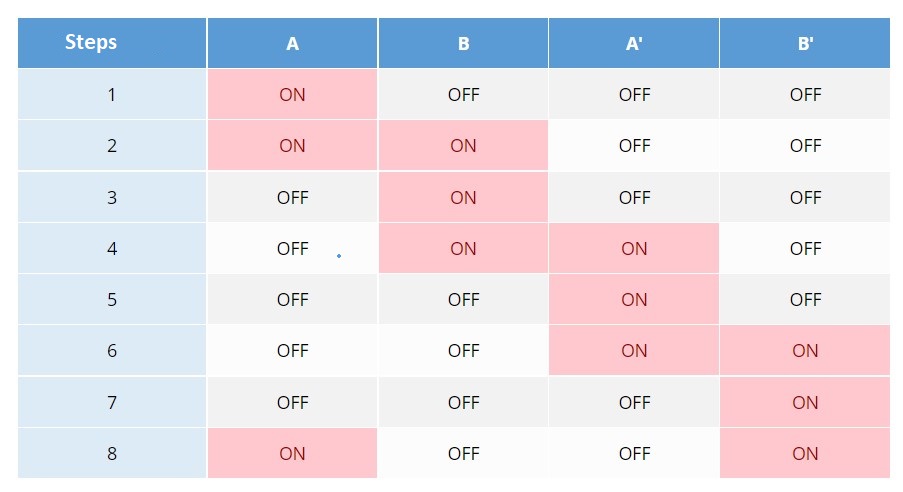
#define IN1 8#define IN2 9#define IN3 14#define IN4 15int Steps = 0;int counter = 64;boolean Direction = true;void setup() {Serial.begin(9600);pinMode(IN1, OUTPUT);pinMode(IN2, OUTPUT);pinMode(IN3, OUTPUT);pinMode(IN4, OUTPUT);}void loop() {for(int i=0; i<counter; i++){stepper(1);delayMicroseconds(800);}Direction = !Direction;counter +=64;}void stepper(int xw) {for (int x = 0; x < xw; x++) {switch (Steps) {case 0:digitalWrite(IN1, LOW);digitalWrite(IN2, LOW);digitalWrite(IN3, LOW);digitalWrite(IN4, HIGH);break;case 1:digitalWrite(IN1, LOW);digitalWrite(IN2, LOW);digitalWrite(IN3, HIGH);digitalWrite(IN4, HIGH);break;case 2:digitalWrite(IN1, LOW);digitalWrite(IN2, LOW);digitalWrite(IN3, HIGH);digitalWrite(IN4, LOW);break;case 3:digitalWrite(IN1, LOW);digitalWrite(IN2, HIGH);digitalWrite(IN3, HIGH);digitalWrite(IN4, LOW);break;case 4:digitalWrite(IN1, LOW);digitalWrite(IN2, HIGH);digitalWrite(IN3, LOW);digitalWrite(IN4, LOW);break;case 5:digitalWrite(IN1, HIGH);digitalWrite(IN2, HIGH);digitalWrite(IN3, LOW);digitalWrite(IN4, LOW);break;case 6:digitalWrite(IN1, HIGH);digitalWrite(IN2, LOW);digitalWrite(IN3, LOW);digitalWrite(IN4, LOW);break;case 7:digitalWrite(IN1, HIGH);digitalWrite(IN2, LOW);digitalWrite(IN3, LOW);digitalWrite(IN4, HIGH);break;default:digitalWrite(IN1, LOW);digitalWrite(IN2, LOW);digitalWrite(IN3, LOW);digitalWrite(IN4, LOW);break;}SetDirection();}}void SetDirection() {if (Direction == 1) {Steps++;}if (Direction == 0) {Steps--;}if (Steps > 7) {Steps = 0;}if (Steps < 0) {Steps = 7;}}
error: #error "This platform isn't recognized by FastLED... yet. See comments in FastLED/led_sysdefs.h for options."The ATtiny1614 generic board
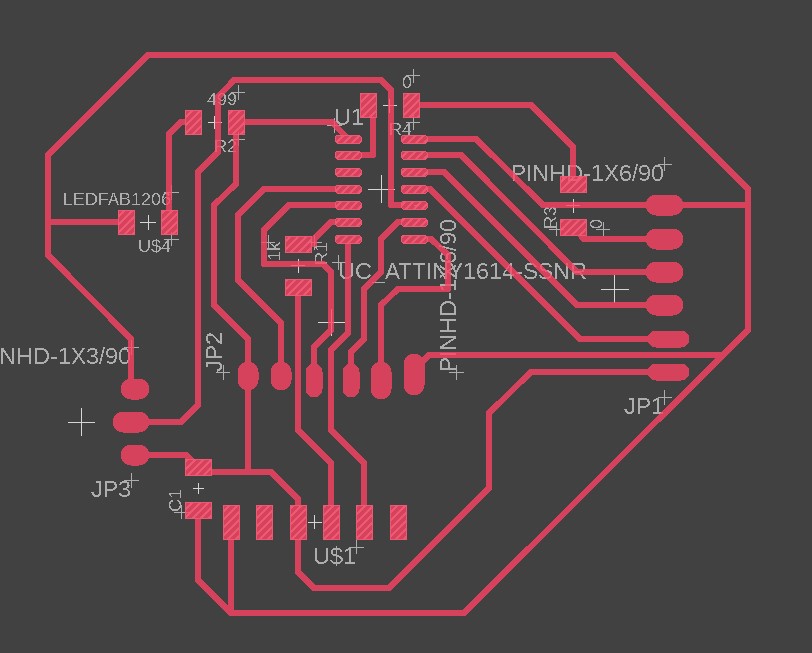
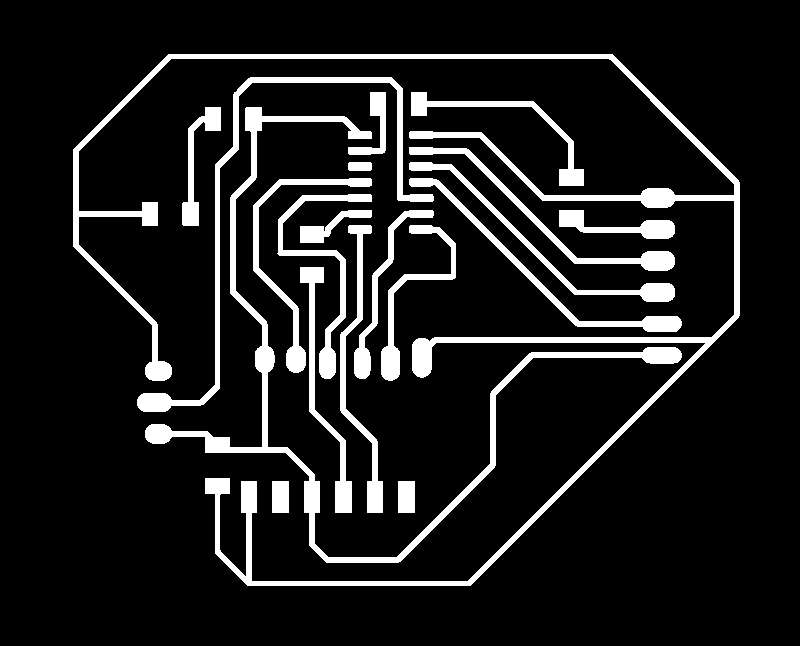
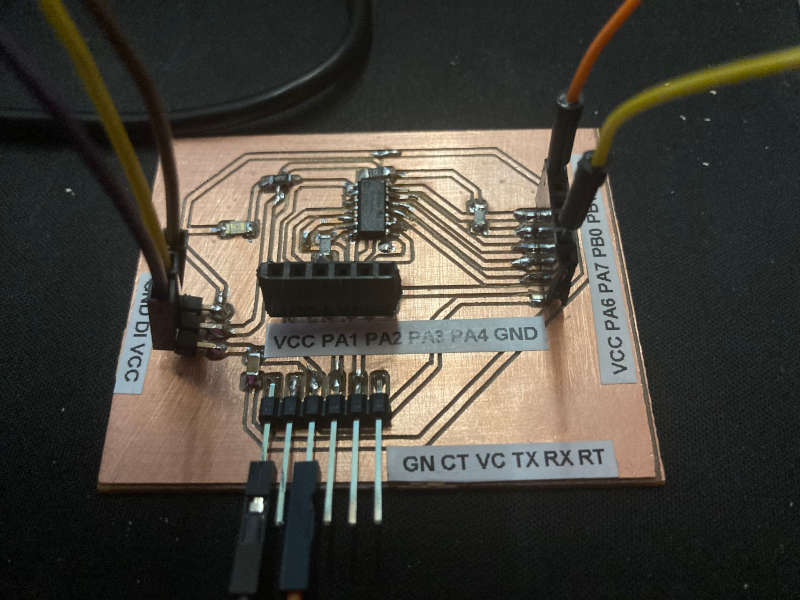
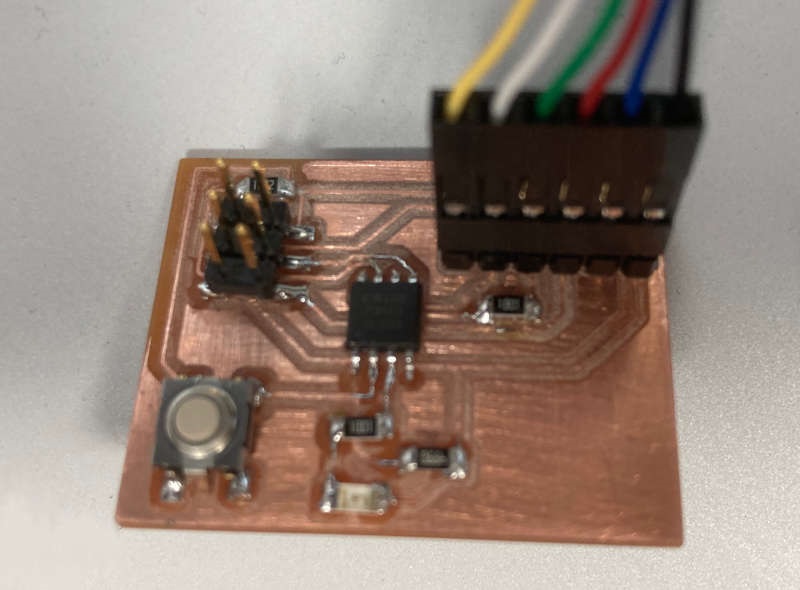
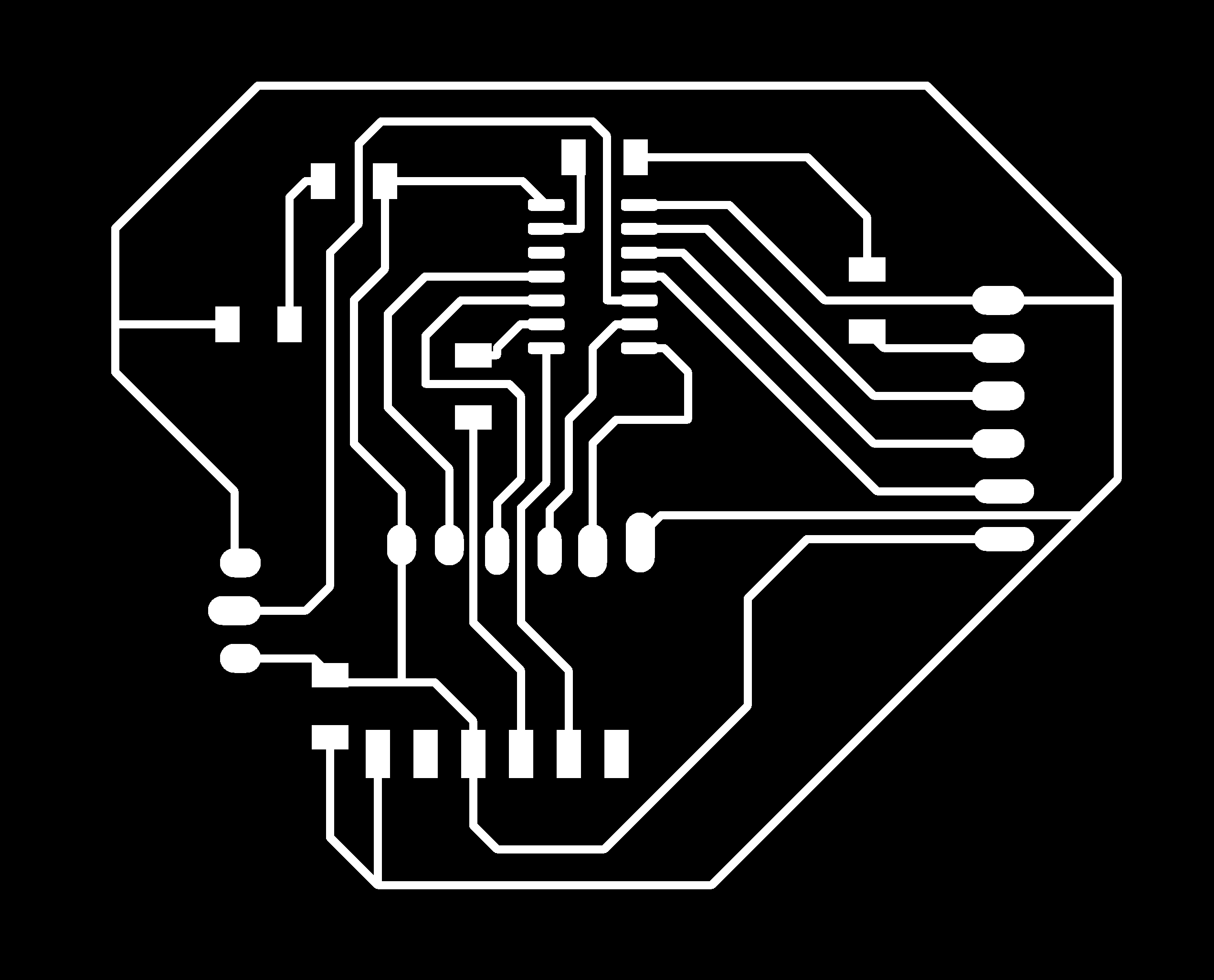
At that point I decided to make an ATtiny1614 generic board, so I could control the OLED display and other devices. The board will have UPDI and FTDI interfaces, and 8 input/output pins, along with VCC and GND on every connector. Also a LED to check power and a capacitor to filter high frequencies and stabilize the power supply.

I like to have GND all around the circuit, so it's easier to connect everything to it, and the MCU in the center:
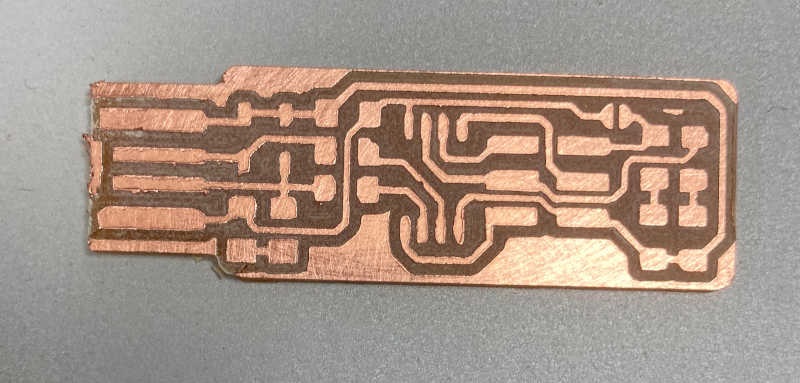
As I was at home, I used the Genmitsu 3018 ProVer to make the board. This time I had it well calibrated and with a setup I knew it was going to work:
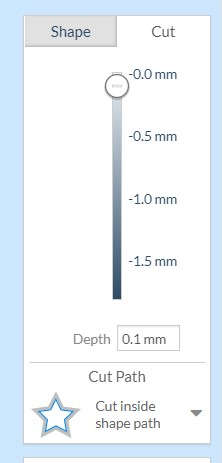
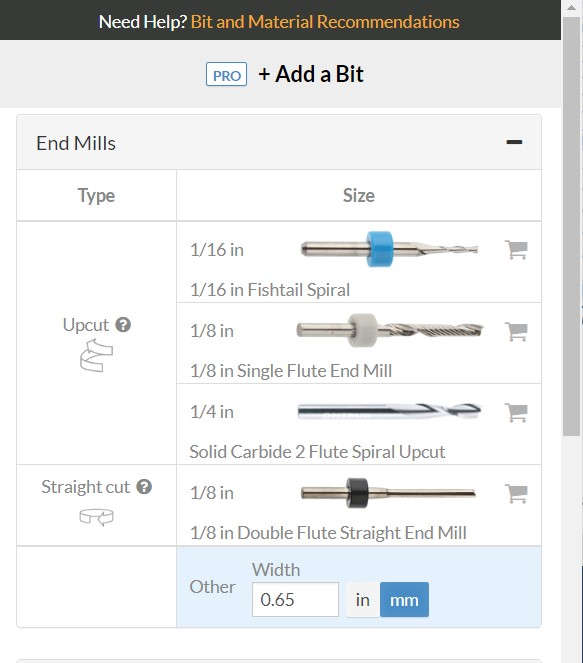
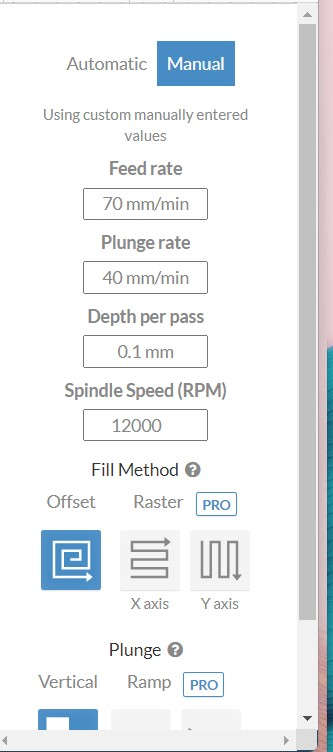
A cut depth of 0.1 mm, a "simulated" end mill of 0.65 mm (I was using a V-shaped mill) and a feed rate of 70 mm/min.
The result was a pretty good board:
Using Atmel ICE to program the 1614 board
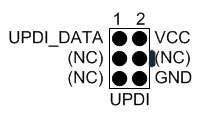
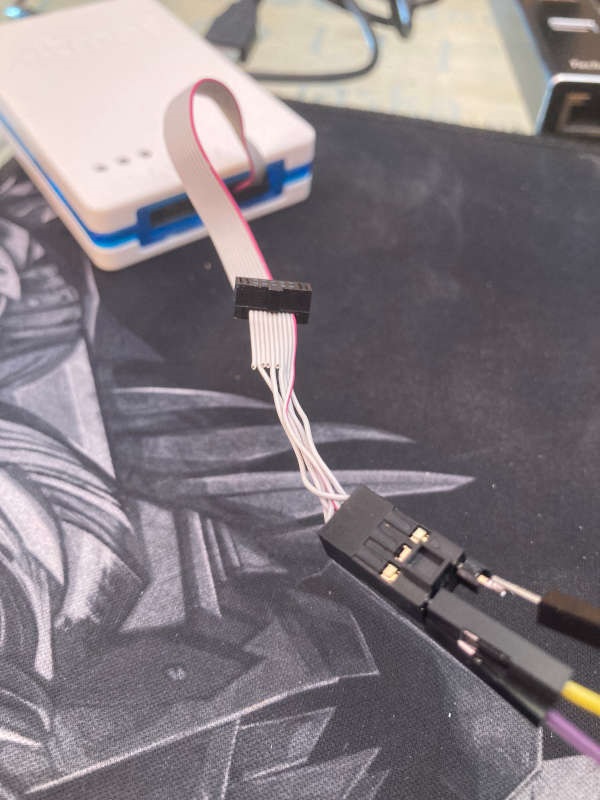
This time I hadn't the programmer we have at the lab, so I think it could be programmed by the Atmel-ICE. To power to the board I used a power supply of 5V. The most difficult thing for me was to set the correct pins of the UPDI interface on the Atmel ICE side:
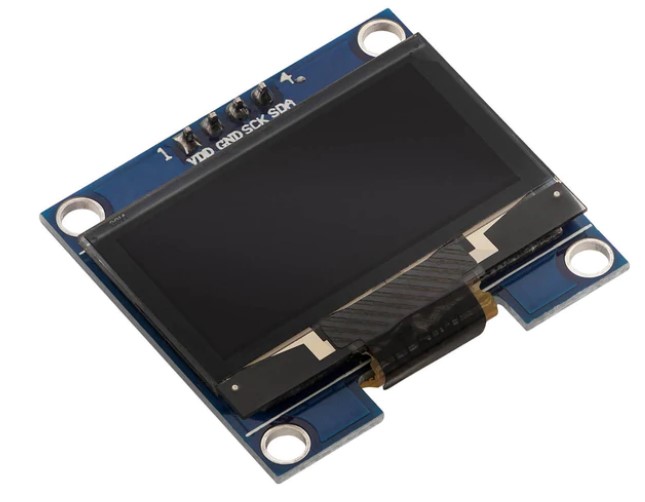
After that I programmed the board with the simple led-blinking program and it worked well. So I tried to program the OLED display. I connected VCC, GND, SCL and SDA and programmed it with a "Hello world" program, but nothing happened. Then I changed the adress of the I2C interface from 0x3C to 03D, and even 0x78, because the last one was printed on the OLED display as the I2C address. Nothing.
Then I used a program to scan I2C address:
// I2C address scanner program#include <Wire.h>void setup(){Wire.begin();Serial.begin(9600);Serial.println("I2C Scanner");}void loop(){byte error, address;int nDevices;Serial.println("Scanning...");nDevices = 0;for(address = 1; address < 127; address++ ){Wire.beginTransmission(address);error = Wire.endTransmission();if (error == 0){Serial.print("I2C device found at address 0x");if (address < 16)Serial.print("0");Serial.print(address,HEX);Serial.println(" !");nDevices++;}else if (error==4){Serial.print("Unknown error at address 0x");if (address < 16)Serial.print("0");Serial.println(address,HEX);}}if (nDevices == 0)Serial.println("No I2C devices found");elseSerial.println("done");delay(5000); // wait 5 seconds for next scan}
But the scanner couldn't find any device. So I thought perhaps the OLED display was wrong. As it was Sunday I decided to try another display on monday morning.
When I arrived at the lab I tried another OLED display and I worked without problems. This is the hello program I used:
#include <Wire.h>#include <Adafruit_GFX.h>#include <Adafruit_SSD1306.h>#define SCREEN_WIDTH 128 // OLED display width, in pixels#define SCREEN_HEIGHT 64 // OLED display height, in pixels// Declaration for an SSD1306 display connected to I2C (SDA, SCL pins)Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, -1);void setup() {Serial.begin(115200);if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3D for 128x64Serial.println(F("SSD1306 allocation failed"));for(;;);}delay(2000);display.clearDisplay();display.setTextSize(1);display.setTextColor(WHITE);display.setCursor(0, 10);// Display static textdisplay.println("Hello, world!");display.println("Fab Academy 2022");display.println("Jon Merino");display.display();}void loop() {}


{kind=link}
{kind=link}