applications and implications
.
lecture / slide: Fabacademy 2015 05.13D Lesson15: Applications and Implications MIT CBA Applications and Implications.
topics: electronics, consumer electronics, musical instruments, robots, inflatables, boats, bicycles, drones, cars, environment, agriculture, biology, prosthetics, shoes, clothes, art, furniture, houses, cities.
assignment: plan and document the final project that integrates the range of units covered: what will it do? who's done what beforehand? what materials and components will be required? where will they come from? how much will it cost? what parts and systems will be made? what processes will be used? what tasks need to be completed? what questions need to be answered? what is the schedule? how will it be evaluated? where possible, you should make rather than buy the parts of your project!.
experimentation: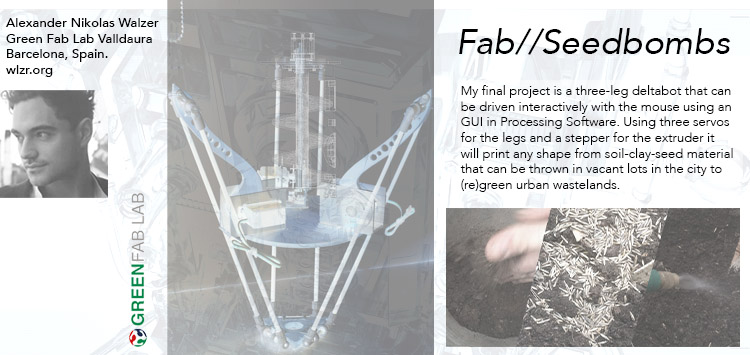
Delta what?
A delta robot is a parallel robot that is designed for precise and fast movements of light payloads, generally used for pick-and-place/pack operations. The deltabot is composed of three two-segment arms/legs mounted in 120 degree intervalls. The arms/legs use parallelograms to restrict the motion of the "wrist", the end effector. Wrist and elbow use ball magnets in order to keep the distance but not an certain angle, that is the magic of the kinematics and it's beautiful to watch how to position of the effector is actually constantly being negotiated between the three servos.What will it do?
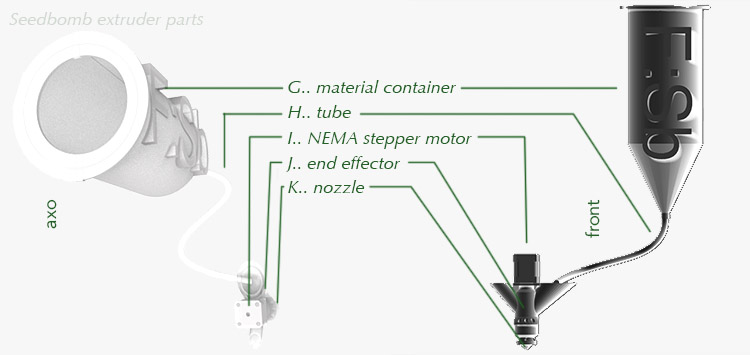
My intention is to create a platform for Deltabots that are entirely fab-able (apart from servos and ball magnets probably). My very first ideology was also to use second hand parts but since I still change the design, I might run out of time but I am sure it is possible! I aim for an exchangeable end effector and choose a Moineau extruder that will squeeze a mix of soil, clay and seeds so that the machine is eventually printing seed bombs, interactively. The interface will be done via Processing Software and use serial communication to drive the servos and motors. I am aiming for a scale bigger than desktop 3D printers and I can see also purpose in academia for an interactive machine like this.Who's done what beforehand?
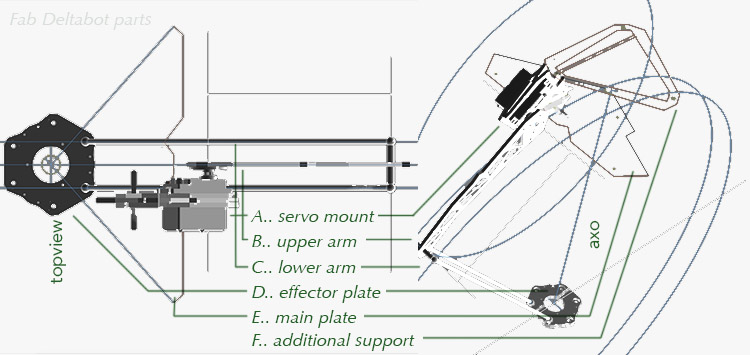
There are quite some Deltabots out there, 3d-printer or not, three of four legged, servo and stepper motor based. I decided to go for a servo based one because it doesn’t require those massive pillars on each corner. Three legs will do their job. I based the design upon many references I found around the internet and I will provide all the sources within the code or design files! The basic idea of establishing this platform is also that it’s hard to loose track in between the different designs and softwares. My machine will run on free software and work smoothly - hopefully.What parts and systems will be made? See this graphics:
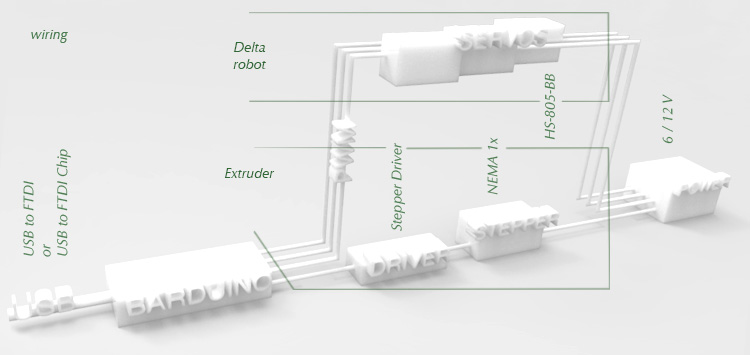
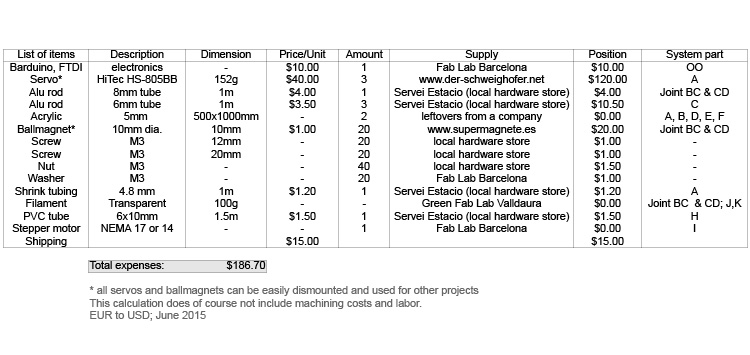
What materials and components will be required? Where will they come from? How much will it cost? Here is a small list of components that I imagine to use:
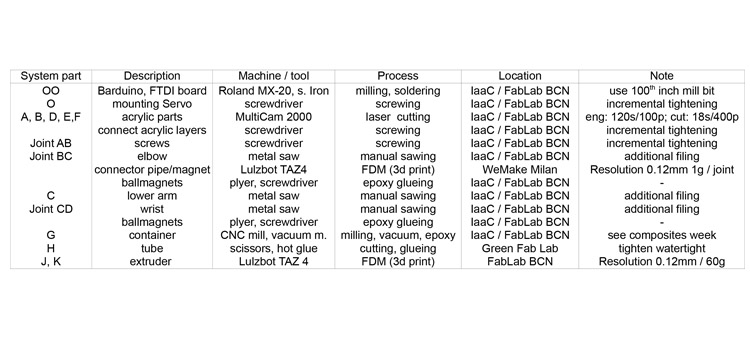
What processes will be used? See here:
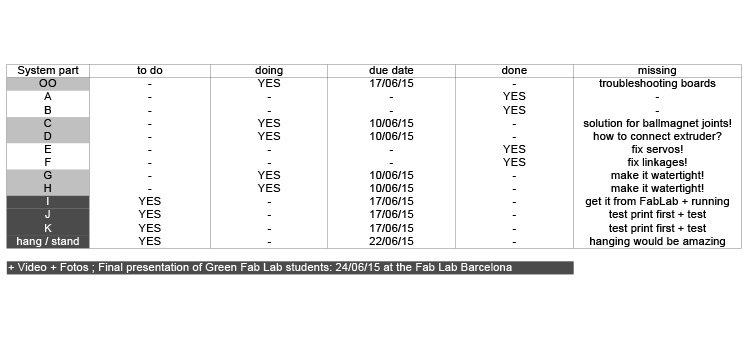
What tasks need to be completed? What questions need to be answered? What is the schedule? See this list:
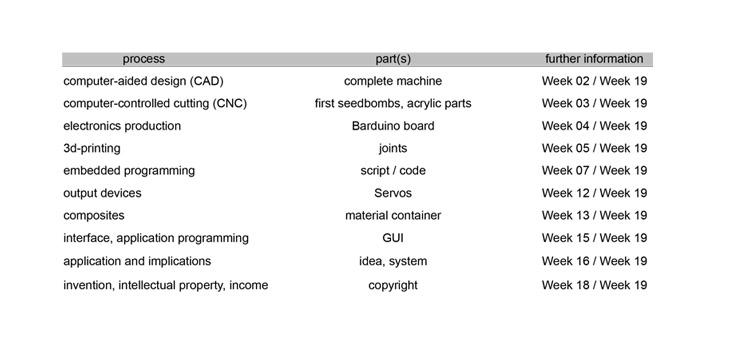
Production processes tackled within the making of the project:
How will it be evaluated?
I developed the project in a spiral kind of way, most of the parts were adapted at least once, either before I fabricated them or afterwards. The very final evaluation will be done when everything is assembled and the connection between software and hardware is working fine. A small scale prototyped helped me a lot so far, it made the development much easier and I am looking forward to show the project to a broader audience..
feedback session:.
files: Files wlzr Fab Academy '15 // w16.
bookmarks / links: Delta robot Wikipedia Progressive cavity pump or Moineau extruder Processing Software Arduino Platform Fab Lab Inventory Fab Lab Barcelona / IaaC supplier map MIT Sloan Professional Standards OCW Toggl Time Tracking Software and App-

Any content on these pages by Alexander Nikolas Walzeris licensed under a Creative Commons
Attribution-NonCommercial-ShareAlike 4.0 International License