Fab-OmniBot | Presentation¶
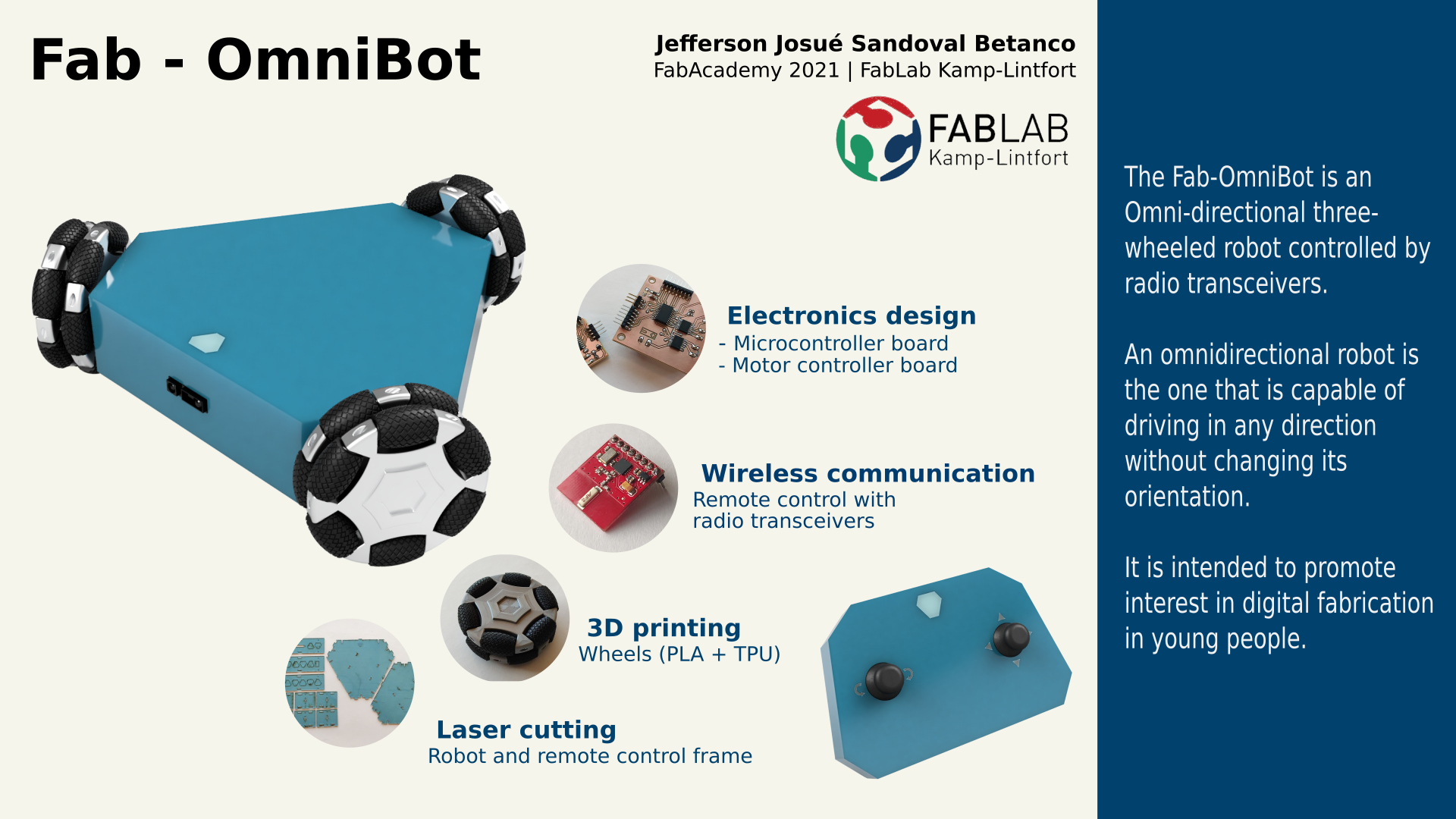
The Fab-OmniBot is an Omni-directional three-wheeled robot controlled by radio transceivers.
An omnidirectional, also known as “holonomic”, robot is the one that is capable of driving in any direction without affecting its orientation; this can be achieved using either Mecanum-wheels or Omni-wheels (the type that I used).
It is intended to promote interest in digital fabrication in young people, then making a transparent case is a key point in terms of aesthetics.
My future plan with the robot is learning autonomous navigation with the application of ROS, subject I have an interest in learning.
Slide¶
Video¶
License¶
This section has been pre-worked during my Invention, Intellectual Property and Business Models assignment.
My key points for the final project are covered by the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International Public License:
NonCommercial — You may not use the material for commercial purposes.
ShareAlike — If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
![]()
This project is is not intended to be profitable, only for learning purposes. It is for every person in the FabLab community, but specially is aimed at the young people in order to awaken interest in digital fabrication.
The development of this project has been possible thanks to the machinery, materials and time provided by FabLab Kamp-Lintfort, Green FabLab Kamp-Lintfort, my instructors (Ahmed B.Abdellatif, Daniele Ingrassia and Ferdinand Meier) and my own.