19. Project Development¶
What tasks have been completed, and what tasks remain?¶
At this point I already:
- Frames.
- Remote control board.
- Omniwheels.
- Robot board.
- Communication between the boards is working.
What has worked? what hasn’t?¶
- Everything I have done so far is working.
- There’s one thing that I that I have not been able to finish yet: the collision avoidance part. I had an accident with the original motor drivers for the robot. I was using the TB6612FNG, but they burned during a test then I made a designed a new board with the L298N (which needs diodes, contrary to the others), so I spent my time on that new design, tests and adjusting the code for the new drivers.
- A quick comment… Eventually, I realized that the nRF24 radio transceiver modules are not really the best in this case. I lose connection from ~2 meters, a better option would be a radio transceiver wit external antenna or ☝🏼 moving the electronics to the outside so the case doesn’t block the signal.
What questions need to be resolved?¶
- Is the acrylic a good material for the robot?
- Will the design+materials of the wheels be good enough to work indoor and outdoor?
- Will the torque of que motors (1.4Kg*cm each) be enough to work on no-flat surfaces (which are inevitable in outdoor environments)?
- Since I plan controlling the robot using ROS after the FabAcademy… Is my project going to be completely and easily adaptable for that purpose? Will I need to change/add something else?
What will happen when?¶
For my time management, at the beginning, I tried to make it very formal and clean with a digital schedule that I into small tasks that I made during the assignments, whose deadlines would be the end of the week:
| Week | Task |
|---|---|
| Principles and practices | Propose and sketch the final project idea. |
| Computer Aided design | Draft Model of the final project. |
| Input devices | I made a first test with the Joysticks that I used later for the remote control. |
| Output devices | I made a motor controller board to test with the L298N drivers that I used later for the robot. |
| Embedded Networking and Communications | I the board Version#1 of the remote control the remote control using nRF24 modules. |
| Applications and Implications week | - I cut the Frames for the robot and remote control. - I made the final version of the remote control board. |
| Invention, Intellectual Property and Business Models | -I made a draft of the Slide and video. - I stablished the license for my project. - I printed the OmniWheels |
| Project Development | I made the board for the robot. |
Later I found that this method doesn’t really work for me, it’s a bit tedious and I don’t really like digital ways to manage the development of a project (unless it’s a group project, but still for my very personal tasks I wouldn’t do it digitally).
I tried an old school way. I have used a printed calendar that I keep on my desk so I can check it every time:
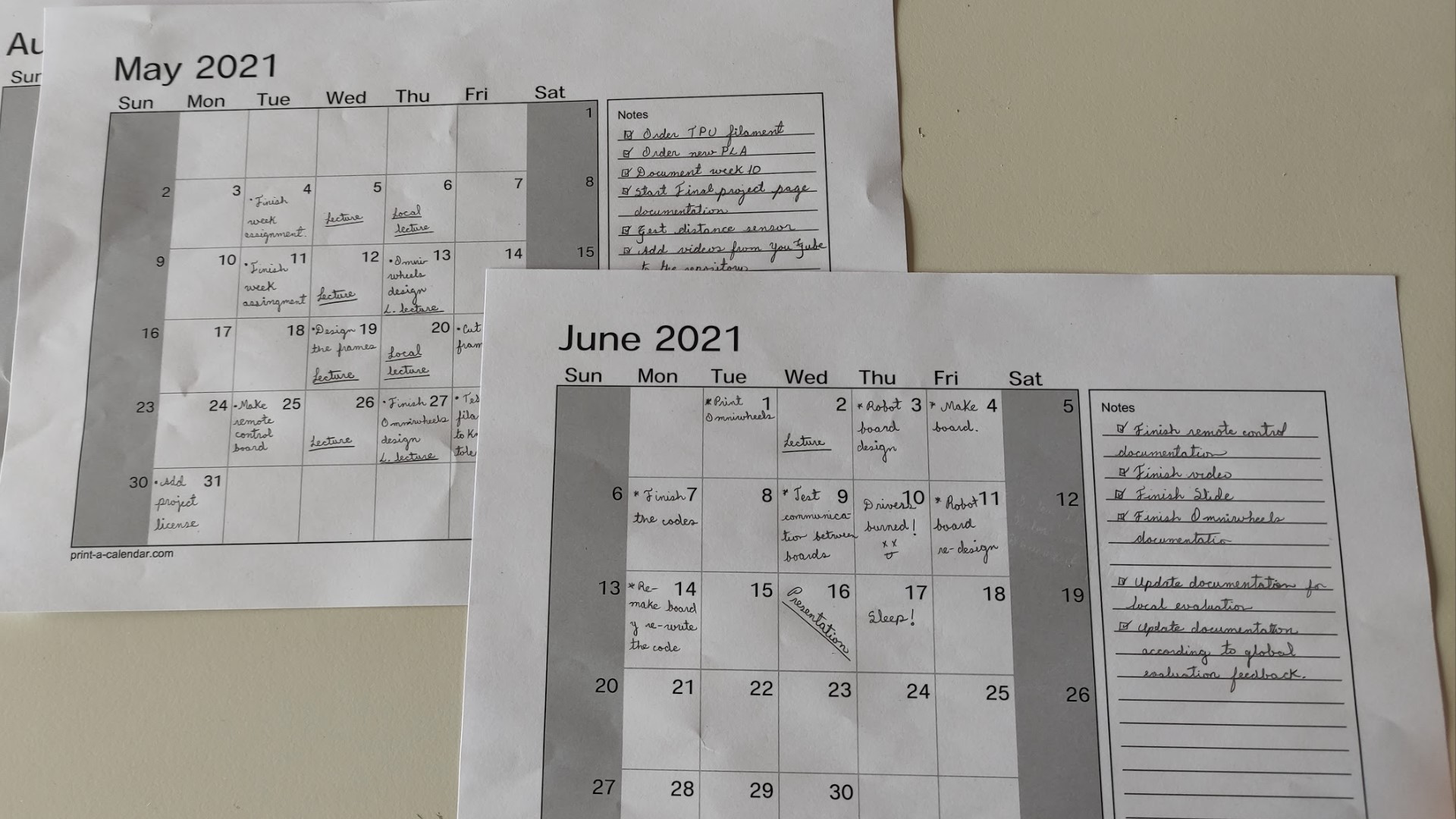
I have made it using print-a-calendar.com.
- I wrote each assignment on its deadline.
- I also made some extra notes and reminders for every task.
This method really helped me a lot cause every time I was aware of the whole current stage and the missing tasks. I found a paper + a pencil very easy and simple to make notes anytime, regardless of whether I am using the computer or not.
What have you learned?¶
Even when I already had basic knowledge on most the covered techniques, there’s always new learning. Besides all of the technical learning I can remark a couple of things during this process: time management and documentation aspect.