Applications and Implications 
Assignment
Propose a final project masterpiece that integrates the range of units covered, answering:
- What will it do?
- Who's done what beforehand?
- What will you design?
- What materials and components will be used?
- Where will come from?
- How much will they cost?
- What parts and systems will be made?
- What processes will be used?
- What questions need to be answered?
- How will it be evaluated?
Your project should incorporate
- 2D and 3D design,
- additive and subtractive fabrication processes,
- electronics design and production,
- embedded microcontroller interfacing and programming,
- system integration and packaging
Where possible, you should make rather than buy the parts of your project.
Projects can be separate or joint, but need to show individual mastery of the skills, and be independently operable.
See more info and recording of the lecture here.
Final project proposal
What will it do?
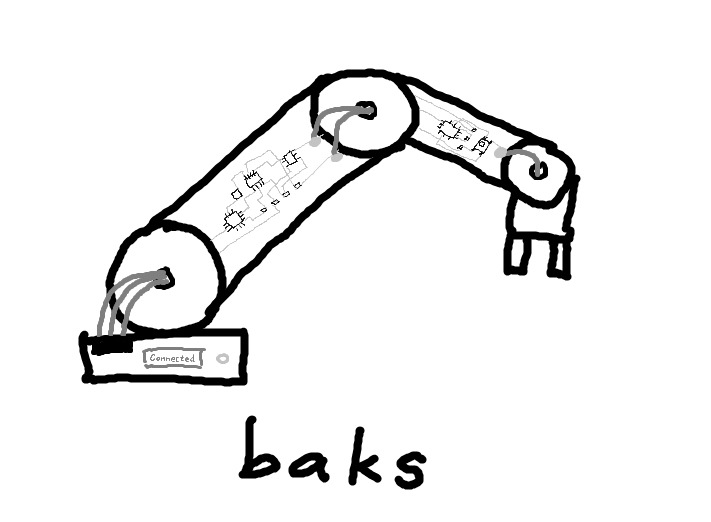
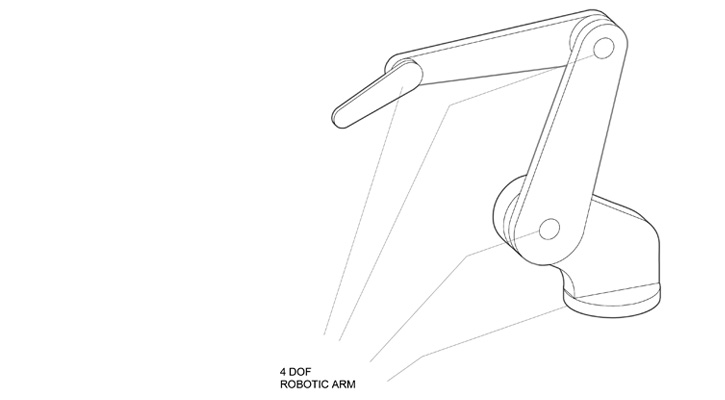
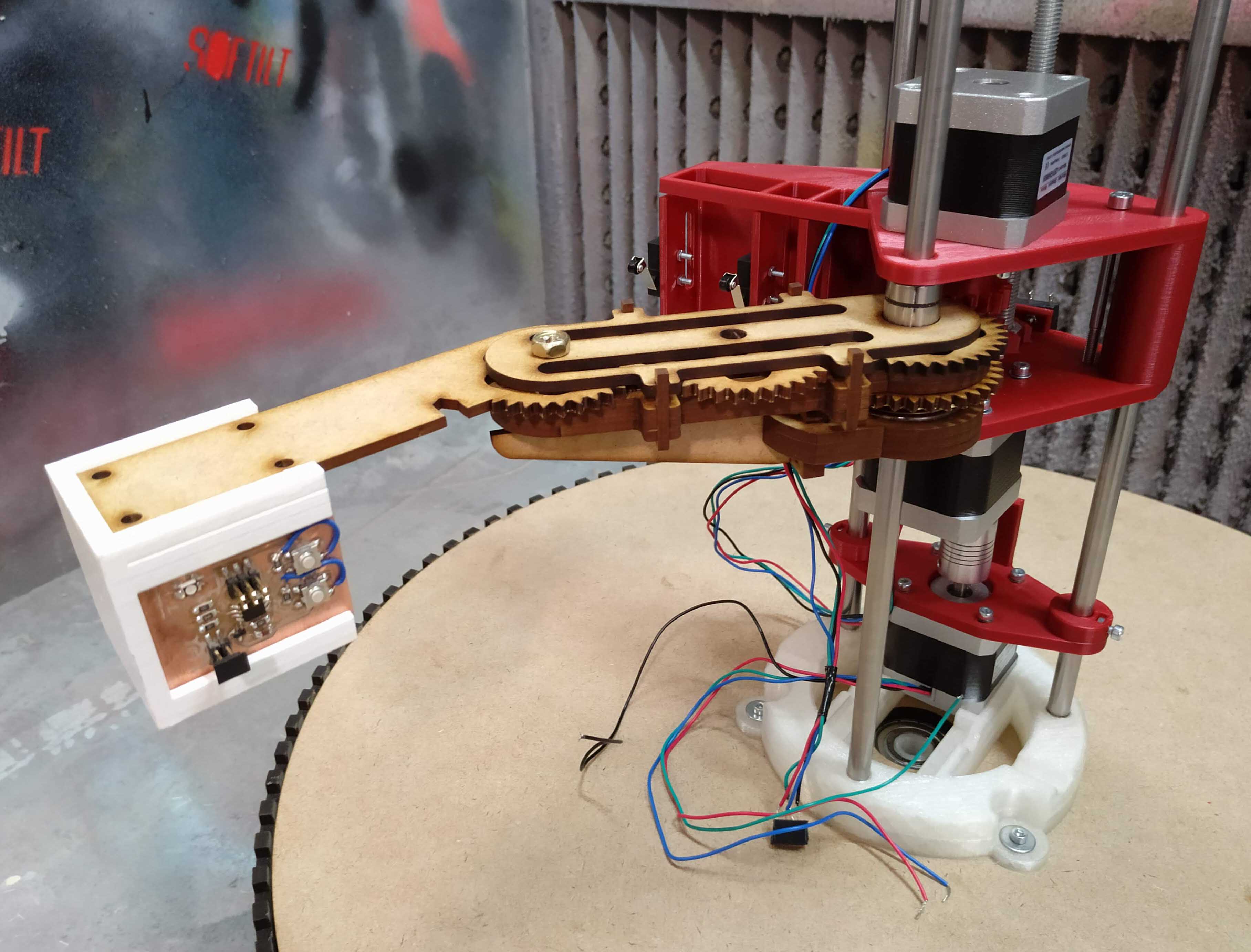
Baksi will be a small, light and nimble SCARA-type robot arm with a structure made of PCBs (with 3D printed additions to stiffen the structure) and powered by brushless gimbal motors with angle sensors. It will be a motion platform that I will add end effectors to later. Its purpose is to teach robotics and perhaps automate some small tasks. I first called it Baks, but then I noticed that my son always asked if I was working on Baksi. The original plan was to make a traditional robot arm as shown in the sketch above, but that would involve balancing out the weight of the arm with springs. So to simplify the project I switched to a horizontal SCARA layout.
Who has done what beforehand?
This robot arm sketch by Masoud Akbarzadeh inspired the shape of spiral 1 of my robot arm joint.
Avishek Das made a small RC servo robot arm with a really nice simulation interface. I just don't like the jerkiness and imprecision of RC servos.

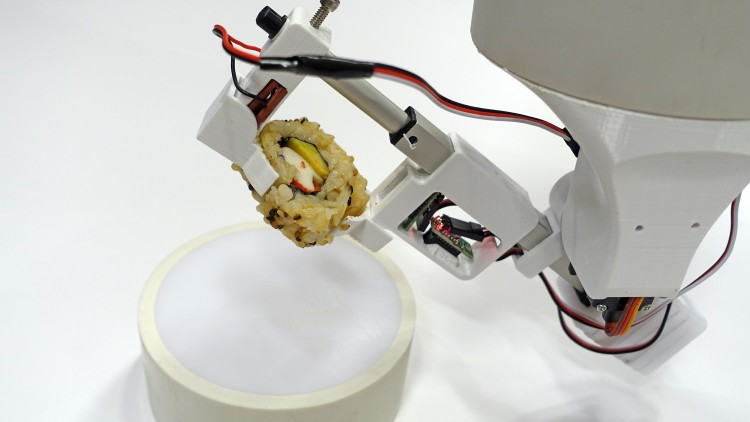
Dan Chen made a clean-looking modular robot that can grab sushi. It's also based on RC servos.
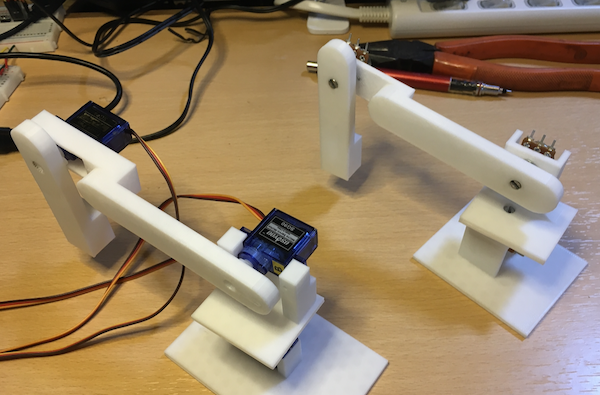
A group at Fab Lab Oulu made a cardboard robot arm in machine week in 2020. It's also based on RC servos.
Hiroaki Kimura made a simple RC-servo arm and controlled it with a smaller arm with potentiometers in the joints.
Kenny Phay Ngiap Peng made a stepper and RC-servo robot arm.

A group at Fab Lab IED Madrid made a stepper-based SCARA arm in Machine Week in 2019.
A group at Super Fab Lab Kochi made a nice stepper based SCARA arm in Machine week 2023.

Jules Topart made a promising robot joint actuator.
Xiaomeng Liu made a very nice iPhone camera gimbal with brushless motors. These are the actuators I want to work with and this is the smoothness of motion that I want. Light and nimble, like a gimbal!
Christian Schmidt made a very compact GoPro camera gimbal but it was a little jittery.
Adam Bäckström hacked hobby servos in an amazing way and created a super-precise robot arm. His simple optical encoder design is inspiring.
A fellow with the username Pinaut created a surprisingly smooth-moving rc servo arm with a learning function.
The electronics blogger Electron Dust created this simple stepper robot arm with a learning function. I love the look of the arm, it's inspiring.
Youtube user 稚晖君 created the most sophisticated DIY robot arm I've ever seen. It's incredible, but also impenetrable. I mean, it is open source but I wouldn't know where to begin trying to understand any of the design files.
 Image credit Datatang.
Image credit Datatang.
John Lauer created a geared stepper robot arm which is really sleek. More interesting to me, he also created a geared brushless motor robot arm. John also created Chilipeppr, which I talk about in Interface and Application Programming.
Damian Lickindorf created Atlas, a crazy cool robot arm which also looks crazy complicated to build. Ooh look, he's using ROS and Moveit for motion planning:
The MeArm is probably the best open source DIY kit for beginner roboticists. I'd like my robot arm to move more smoothly and be a bit more capable than this arm.
The AR4 is probably the best open source DIY kit for more advanced roboticists. I think the world hasn't quite caught up to its significance. I think it's important, in the way that the RepRap is important. I'd love to build one some day. I want my robot arm to be smaller and less expensive than this arm.
More robot arm inspiration (I had to split this up because the image carousel couldn't handle more than 20 entries):
Skenkir. This was a university project with Guðjón Bergmann and Baldur Björnsson. Our task was to lift a wine glass and give the professor a sip. And because I'm Gyro Gearloose's biggest fan, I wanted the robot to have a hand in a white glove.
The uArm from Ufactory. My plan was to make it fry doughnuts, but then I accidentally fried its control board.
The Nyrio One. We borrowed this one from Karítas in Fab Lab Sauðárkrókur and I had a lot of fun with it until it got stuck trying to make a move and fried a motor control board. I replaced it and we returned it to Sauðárkrókur. I vowed to make my robot arm incapable of damaging itself!
The Dexter robot arm by Haddington Dynamics is the original reason why I wanted to make a robot arm. It was open source in the beginning, but not anymore. Their hyper-precise optical encoder design is phenomenal, there's nothing else like it in the world. They use this advanced sensor to create precise motion from imprecise parts, which is exactly what we need for a proper robotics revolution, in my opinion. I'd love to try to make something like their optical encoder using a microcontroller instead of an FPGA. Dexter costs $15.000 now and is probably worth it, but it's still inaccessible to most people. Had I known about their Kickstarter, I would have thought seriously about the $2000 early bird kit.
The KUKA-style stepper robot arm from Youtube user ZeroBacklash is a really clean build. When it's ready, they will sell the design files.
The Mirobot is another clean build, but it's not open source. Coy Beardmore managed to make the robot solder circuit boards.
Skyentific. His video on brushless motors is a major reason why I chose to use brushless motors in my robot arm.
Ben Katz created the MIT Mini Cheetah. His bilateral teleoperation video is just an intermediate stage in the build, but it's still the best example of a haptic interface between robots that I've seen.
This is the first BLDC control system that I tried to build, but it was too complicated for me to replicate. Check out the project's Hackaday.io page.
Juan Pablo at Random Access Projects has excellent videos on sinusoidal BLDC control. This was the first BLDC control system that I managed to get working. I supported his Patreon page and got access to his Arduino code. In this video he demonstrates his own BLDC control board that uses three half-H-bridge chips instead of a ready-made brushless motor driver chip. This might be an interesting direction for spiral 3 of my robot arm.
SimpleFOC Community user Valentine has designed some interesting BLDC control boards. Of interest to me are the Mosquito (which contains a knockoff of the DRV8313 motor driver that I'm using) and the Lepton 1.0, 2.0 and 3.0.
 The Lepton 1.0 field-oriented control board for brushless motors.
The Lepton 1.0 field-oriented control board for brushless motors.
Shay Sackett has one of the smoothest slow control demos of a brushless motor that I've seen:
Mizuhai Yukkie created an interesting small BLDC driver board that works with the SimpleFOC library:
The blog Berryjam posted a BLDC motor being driven at super slow speeds with an L6234 driver chip (too bad they aren't available now). The blog post has good graphs of different BLDC motor control techniques.
Youtube user RoTechnic made a Bowden tube robot arm. The stepper motors are not on the arm but on the table, which makes the robot much, much lighter and able to lift more weight. The motor movements and forces are routed to the arm joints with strings that go throught plastic tubes, just like the brakes lines on a bicycle. It works remarkably well, I can see this being a popular design in hobby robot arms soon and quite possibly in small professional robots as well.
Hackaday user Xavi Cano made an educational five-bar parallel robot:
What will you design?
A robot joint controller board that I can replicate to make all the joints on the robot. I'll also design a 3D printed part that hides all the wires.
What materials and components will be used, where will they come from, how much will they cost?
| Part | Part no. | Amount | Price (USD) | Total (USD) | Link | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| GM2804 Gimbal Motor w/Encoder | G006983_2 | 3 | 38.99 | 116.97 | https://shop.iflight-rc.com/ipower-gm2804-gimbal-motor-with-as5048a-encoder-pro288 | |||||
| Gimbal Motor Slipring - OD 6.5mm | G006983_2 | 2 | 15.99 | 31.98 | https://shop.iflight-rc.com/6-5mm-slipring-for-ipower-motor-gm2804-gimbal-motor-pro302?search=Gimbal%20Motor%20Slipring%20-%20OD%206.5mm | |||||
| Yoctopuce Micro-USB-Hub-V2 | MHUB0002 | 1 | 32.4 | 32.4 | https://www.yoctopuce.com/EN/products/extensions-and-networking/micro-usb-hub-v2 | |||||
| Pololu Adjustable 4-12V Step-Up/Step-Down Voltage Regulator | S18V20ALV | 1 | 37.95 | 37.95 | https://www.pololu.com/product/2572 | |||||
| ATSAMD21E18A-AUT | ATSAMD21E18A-AUTTR-ND | 3 | 4.23 | 12.69 | https://www.digikey.com/en/products/detail/microchip-technology/ATSAMD21E18A-AUT/4878871 | |||||
| DRV8313PWP | 296-35540-5-ND | 3 | 4.81 | 14.43 | https://www.digikey.com/en/products/detail/texas-instruments/DRV8313PWP/3790947 | |||||
| PLA filament | 10 | |||||||||
| Total | 256.42 |
What parts and systems will be made?
I will make the control boards and 3D printed structure.
What processes will be used?
PCB milling, 3D printing.
What questions need to be answered?
Can I find an Arduino core for the SAMD21 that both the OSAP and SimpleFOC libraries can compile to? Can these two libraries coexist on the same microcontroller? Can I get the closed loop control working? Can I tune the PID? Can I mill the fine traces for the SAMD21 microcontroller and the DRV8313 brushless motor driver? Can I design such a complicated board?
How will it be evaluated?
If I manage to get one robot joint working, then I consider the final project a success. I will keep working on the robot after the final presentation.