Build your own baksi
Here are instructions that you can follow to build your own baksi robot arm. This page is a work in progress.
| Part | Part no. | Amount | Price (USD) | Total (USD) | Link | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| GM2804 Gimbal Motor w/Encoder | G006983_2 | 3 | 38.99 | 116.97 | https://shop.iflight-rc.com/ipower-gm2804-gimbal-motor-with-as5048a-encoder-pro288 | |||||
| Gimbal Motor Slipring - OD 6.5mm | G006983_2 | 2 | 15.99 | 31.98 | https://shop.iflight-rc.com/6-5mm-slipring-for-ipower-motor-gm2804-gimbal-motor-pro302?search=Gimbal%20Motor%20Slipring%20-%20OD%206.5mm | |||||
| Yoctopuce Micro-USB-Hub-V2 | MHUB0002 | 1 | 32.4 | 32.4 | https://www.yoctopuce.com/EN/products/extensions-and-networking/micro-usb-hub-v2 | |||||
| Pololu Adjustable 4-12V Step-Up/Step-Down Voltage Regulator | S18V20ALV | 1 | 37.95 | 37.95 | https://www.pololu.com/product/2572 | |||||
| PLA filament | 10 | |||||||||
| Total | 256.42 |
Here are all the electronic components you need to assemble one baksi board:
| Id | Designator | Footprint | Quantity | Designation | Supplier and ref |
|---|---|---|---|---|---|
| 1 | U1 | TQFP-32_7x7mm_P0.8mm | 1 | SAMD21 | ATSAMD21E18A-AUTCT-ND |
| 2 | U3 | SOP65P640X120-29N | 1 | DRV8313PWP | 296-35540-5-ND |
| 3 | SW1 | Button_Omron_B3SN_6.0x6.0mm | 1 | Switch_Tactile_Omron | B3SN-3112P |
| 4 | U4 | SOT-223-3_TabPin2 | 1 | Regulator_Linear_3.3V_1A_DiodesIncorporated | AZ1117IH-3.3TRG1 |
| 5 | D1 | LED_RGB_CreeLED_CLV1A-FKB | 1 | LED_RGB_CreeLED_PLCC4 | CLV1A-FKB-CK1VW1DE1BB7C3C3 |
| 6 | D3 | LED_1206 | 1 | White LED 1206 | QBLP650-IW |
| 7 | R18,R13,R19,R1,R7,R14,R16,R15 | R_1206 | 8 | 0Ohm | RC1206FR-070RL |
| 8 | R5,R2,R4,R3 | R_1206 | 4 | 1kOhm | RC1206FR-071KL |
| 9 | R11,R9,R8,R12,R6,R10 | R_1206 | 6 | 10kOhm | RC1206FR-0710KL |
| 10 | C4 | C_1206 | 1 | 10nF | 1206 component book |
| 11 | C10,C7,C5 | C_1206 | 3 | 100nF | 1206 component book |
| 12 | C6 | C_1206 | 1 | 470nF | 1206 component book |
| 13 | C2,C8 | C_1206 | 2 | 1uF | C3216X7R1H105K160AB |
| 14 | C1,C3 | C_1206 | 2 | 10uF | GRT31CC8YA106ME01L |
| 15 | C9 | CP_Elec_D6.3mm_H6.1mm | 1 | 100uF | EEE-FN1E101UL |
You need to make three of these boards to make a baksi robot.
Here are all the electronic components that you need to make a sensing board for baksi:
| Id | Designator | Footprint | Quantity | Designation | Supplier and ref |
|---|---|---|---|---|---|
| 1 | M1 | SeeedStudio_XIAO_RP2040 | 1 | Module_XIAO-SAMD21 | SKU 102010328 |
| 2 | SW1 | Button_Omron_B3SN_6.0x6.0mm | 1 | Switch_Tactile_Omron | B3SN-3112P |
| 3 | D1 | LED_1206 | 1 | Red LED 1206 | SML-LX1206IC-TR |
| 4 | R2 | R_1206 | 1 | 10Ohm | RC1206FR-0710RL |
| 5 | R1 | R_1206 | 1 | 10kOhm | RC1206FR-0710KL |
| 6 | R3 | R_1206 | 1 | 10MOhm | RC1206FR-0710ML |
You need to make one sensing board.
Download 3D print with internal channels
Download baks_joint2_traces.png
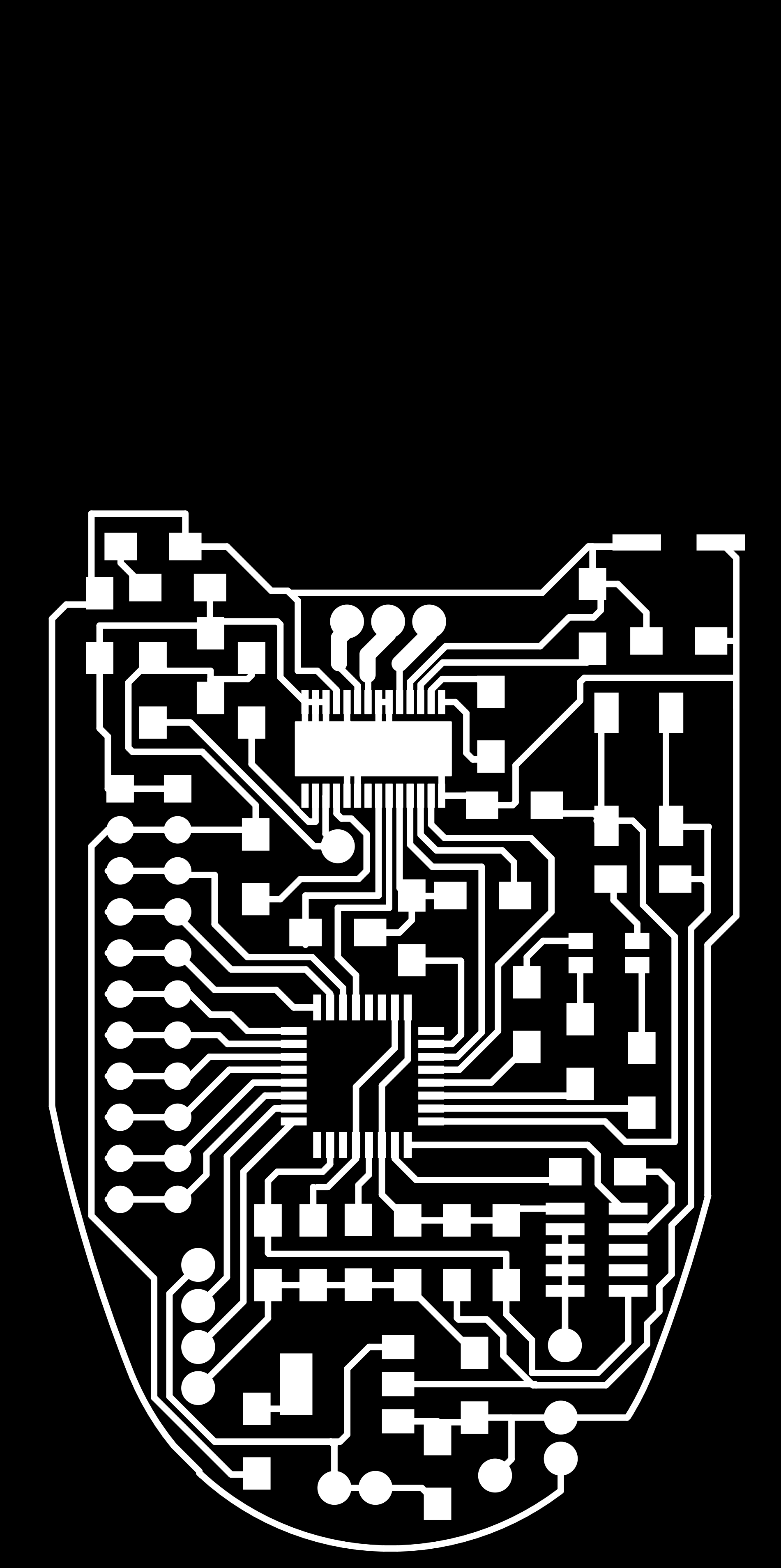{kind=link}
Download baks_joint2_traces_exterior.png
{kind=link}
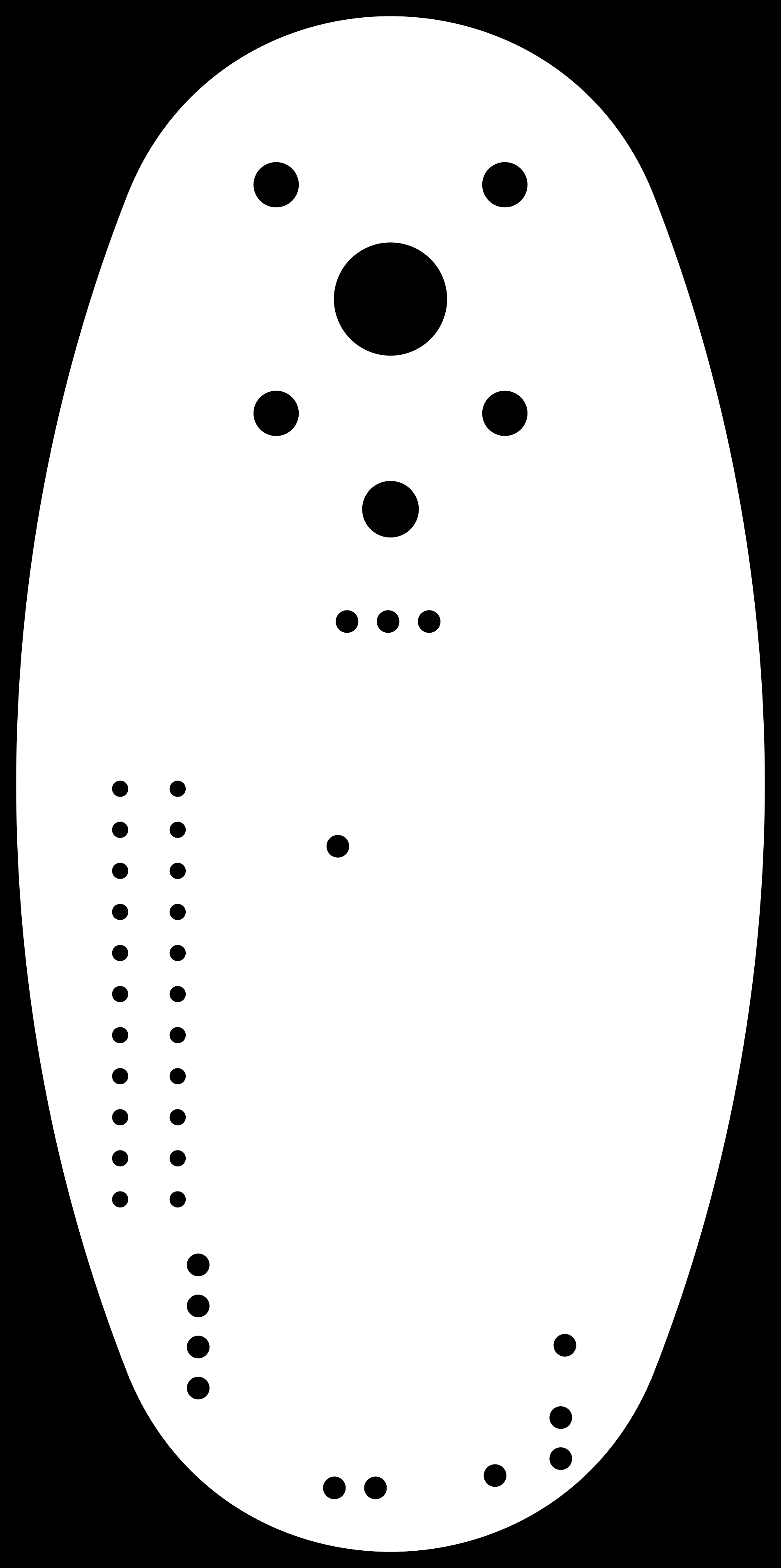{kind=link}