
Final Project Build
Now it been a long and tedious journey and now we have something to show for it
Let pick up where we Left of (Mechanical)
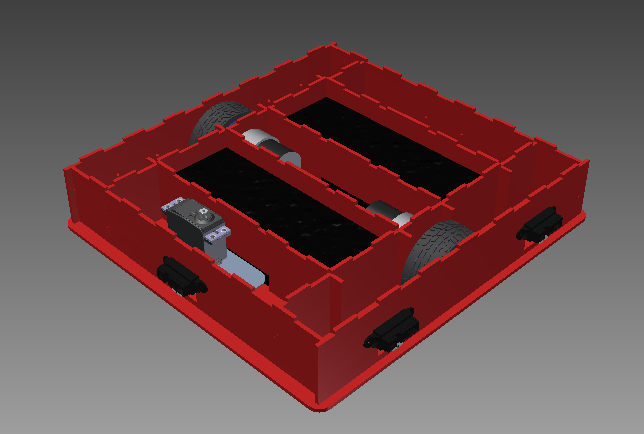

Now

and we have a working Mobile Base but only motors and batteries sensors are out of stock in the local store and i ordered them online cross your fingers they get here undamaged
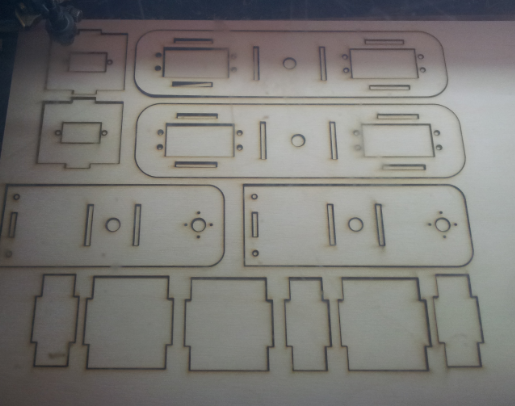
No for the Torso
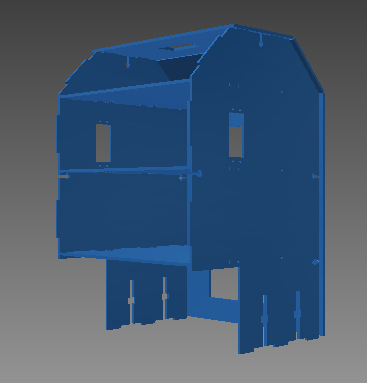
Not the most interesting part of the project but a critical one none the less
after a bit of laser cutting we get this

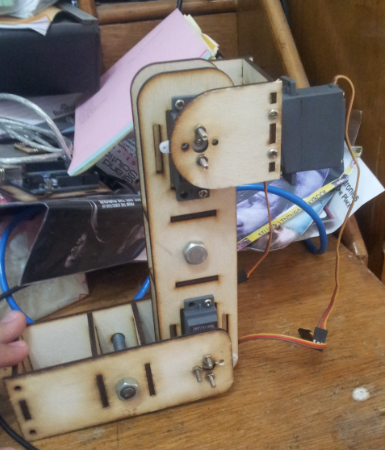
Now after attaching it to the base

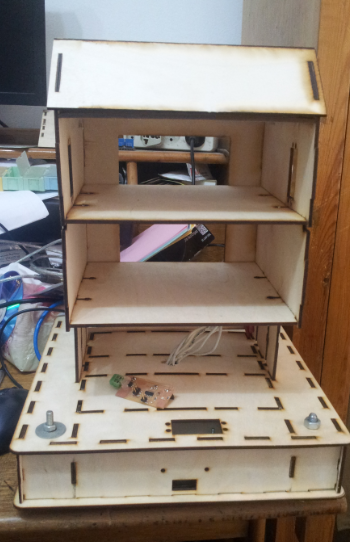
and that almost it for the Torso
Now for the Arms i think getting the arms to work correctly and still be able to lift something is going to be a bit tricky
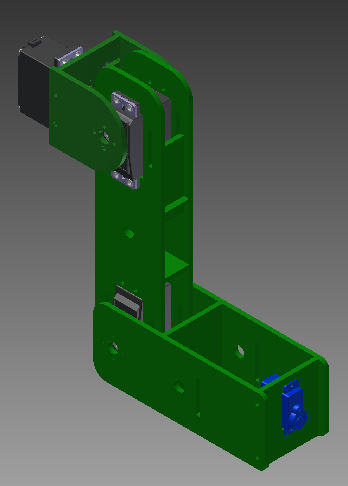
and After a bit of laser cutting
and after Assembly
and Now for the other one
Shoulder
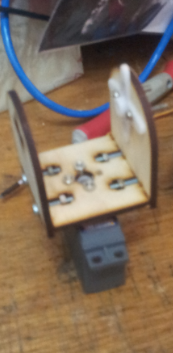
and then the rest of it next to the other one

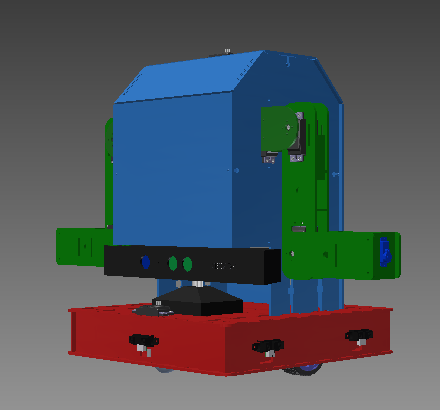
Awesome now to put everything together

now comes the Electrical Systems
The basic Control Scheme of the electrical System is based around what i like to call distributed layer processing where every part of a sub system has its own MCU which does all the low the relay low level processing and then send out over a communication protocol the usable data for the CPU to do all the High Level Process
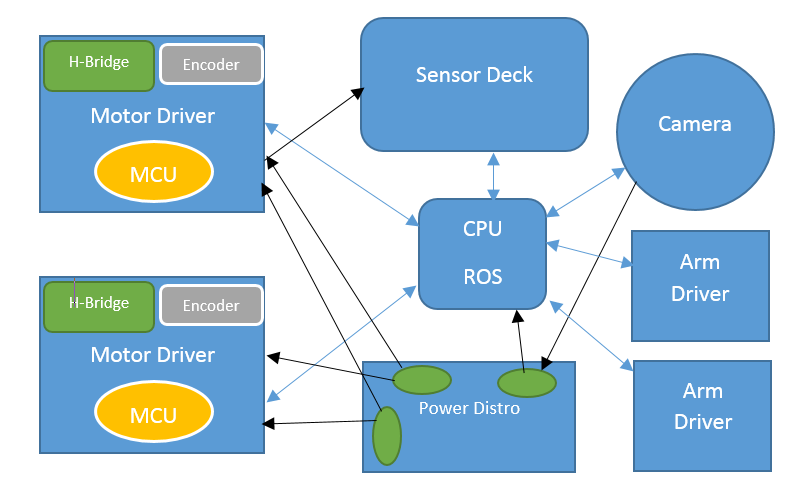
and going back to Input Devices Output device and Project Development you can find most of the board found block diagram above
Proximity Sensor Deck Board:
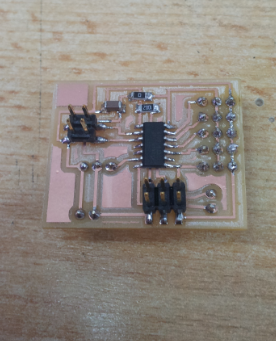
Arm Controller
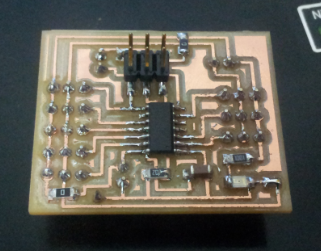
And the Motor Driver
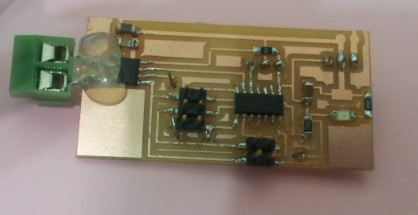
as for the power Distribution Board i used 2 linear regulators on each Board a 5v for the electronics and a 6V for the Servo motors and the input power form the batteries is already 12V perfect for the motors of source adding a capacitor
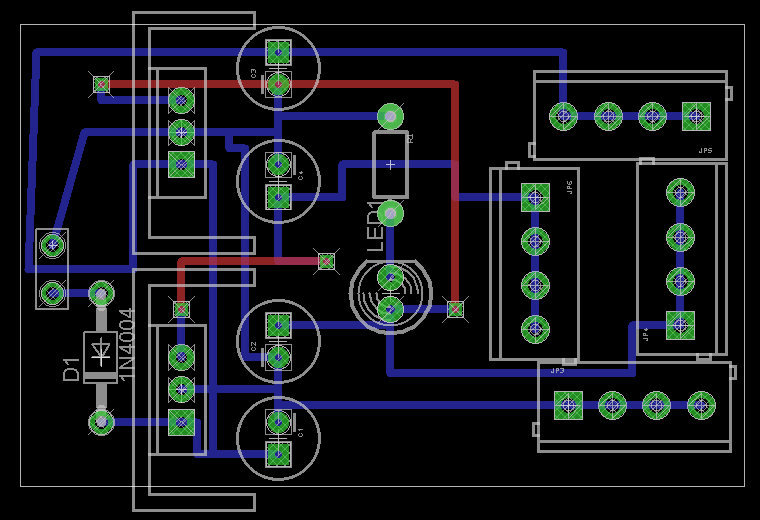
these components plus the raspberry pi and a camera make up the main Electrical scheme and thus the main task for building the software is build interfaces for all these elements
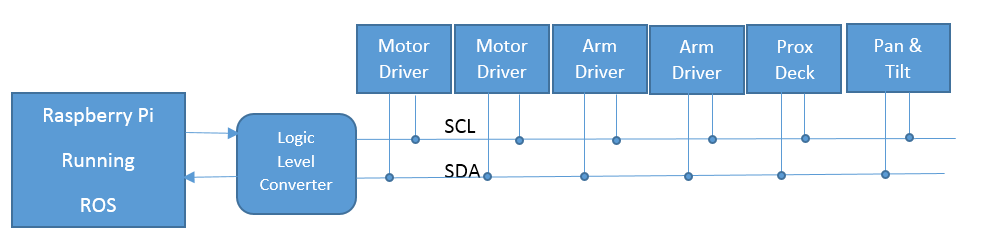
But since the Ras Pi has built in I2C so it is just a matter of creating data translator layers in the software basically small scripts that take in the data from the i2c port and organize them up into readable data packets and sends to there intended distention
All of that is great and all but half way during testing i blew a motor driver something got stuck and the motor spiked destroying the small H-Bridge IC the solution to me is to re-design the motor board with a MOSFET based H-Bridge
also the Sensors are camera are still in the mail so i think because of all the holidays they are going to get delayed a bit more so with out them i am still blind
Weer are we :
- Mobile Base 80%
- Arms 70%
- Head 30%
- Torso 85%
- Gripper(s) 50%
- Motor Driver (V03 70%) V04 60%
- Distance Sensor Deck 70% "Working on Embedded Firmware"
- Arm Driver 65% "Working On Embedded Firmware"
- Power System 80% "Working on built in Charging System"
- Camera 0%
- Main CPU 10%
- OS 10%
- Mapping 0%
- Roaming 30%
- Kinematics (Motion Control) 0%
- Translators 30%
- Computer Vision 0%
- PCL(?) 0%
What are the next step in advancing :
- Fix Urgent Problems
- Motor Driver Board
- turn better motor wheel Couplers
- 3d print servo back support for arm actuators
- Cable housing
- smoothing servo jitter
- Complete CAD Model
- Draw up all screws nuts and bolt to dims
- run animation and contact analysis to find problematic areas in arm range of motion
Videos from testing :
Testing the arm
https://www.youtube.com/watch?v=0RFNRoVNA5w&feature=youtu.be
Testing The mobile base
https://www.youtube.com/watch?v=yu3Tw0X5mDk&feature=youtu.be