Final Project First idea¶
This is my first idea for final project!
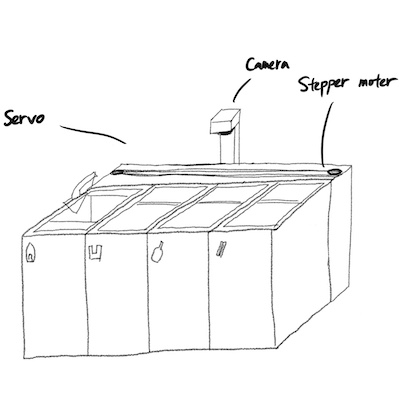
This is a trash box that automatically sort trash. I’m thinking of making a trash box for use at home or at Fablab Kuriyama.

-
WHY…you chose to do this project?
- As a requirement for taking the Fabacademy at Fablab Kuriyama, the goal of the final project is to find a problem in Kuriyama Town and solve it.
- Kuriyama Town has a very strict garbage separation policy.There are many types of garbage to be separated,
- household trash segregation
- Food Waste
- Garbage that can be made into charcoal
- Garbage that cannot be made into charcoal
- Plastics
- Cans, bottles and PET bottles
- Paper
- Iron, metal, aluminum foil
- Wooden chopsticks
- Glass
- household trash segregation
You can check this website to find out what type of garbage is covered by this site.
https://www.town.kuriyama.hokkaido.jp/site/trash/196.html
Even if it is the same plastic, there are different types of garbage depending on whether it has a mark on it or not.

If it is marked with this symbol, you can dispose of it in a plastic trash box.
-
HOW…you think you will make your Final Project (what sensors? Output? Etc)
I’m going to keep working on this project for three years after FabAcademy ends!
I would like to do image classification of all garbage in Kuriyama Town.
Due to the time schedule, I am thinking of creating each spiral.
 In the first spiral, I would like to create a machine that recognizes trash with a camera and opens the lid of the target trash box according to the type of trash.
In the first spiral, I would like to create a machine that recognizes trash with a camera and opens the lid of the target trash box according to the type of trash. In the second spiral, I’m planning to make a trash box that uses a camera to recognize trash and a servo motor to dump the trash into the target trash box according to the type of trash.
In the second spiral, I’m planning to make a trash box that uses a camera to recognize trash and a servo motor to dump the trash into the target trash box according to the type of trash. In the third spiral I would like to improve the Second Spiral machine and make a machine using servo motors and stepper motors.
Also, this mechanism is scalable, as you can put several trash boxes next to each other!
In the third spiral I would like to improve the Second Spiral machine and make a machine using servo motors and stepper motors.
Also, this mechanism is scalable, as you can put several trash boxes next to each other! If there is enough time, I would like to install a meter on each trash box to show the amount of trash.
If there is enough time, I would like to install a meter on each trash box to show the amount of trash.Also if time permits, I am thinking of installing other sensors along with camera image recognition. For example, a soil sensor can recognize wet garbage and prevent it from being thrown in the trash.

I’m considering the following flow.

ESP32 (self made board): Controlling servo motors and stepper motors
RaspberryPi & Pi camera: Use for image recognition
Soil sensor: measuring moisture content
Servo moter: putting the trash into the trash box
Stepper moter: putting the trash into the trash box.
updated 3/19 JST – version 1.0.2¶
- External Form
-
What and how will you design & fabricate? What material? What processes?
-
The design of the box has not been finalized yet, but it will be processed with a shopbot or, if the shopbot is not available due to the pandemic, with a laser cutter
-
The lids and hinges of the trash box will be made using a 3D printer.
-
-

-
Mechanical System
-
Will your project have this? What and how will you design & fabricate?
-
This trash can system is divided into two main parts trash box and sorting machine.
- Each trash can will have an indicator to check the amount of trash

- The sorting machine uses a camera to recognize the image of the trash and takes the trash to the target trash box.

The end-effectors for each of the spirals shown above operate differently, but I would like to implement all of them using servo motors or stepper motors.
-
-
-
Electronics
-
What and how will you design & fabricate? What components are do you think you might need (MCU, sensors, output devices, power supply, etc.)?
-
Trash box indicator
- MCU: ESP-WROOM-32
- Input: Ultra Sonic Sensor
- Output: LED
-
Sorting machine
- MCU: ESP-WROOM-32
- Input: camera (trhough raspberry pi)
- Output: Servo moter, Stepper moter
-
-
-
End Effector
-
What will it be and how will you design & fabricate? Programming/ What will you ask the MCU to do? What programming language are you thinking of using?
-
programming language
- Trash box
- Arduino language (C++)
- Sorting machine:
- image recognition: Python
- moter: Arduino language (C++)
- Trash box
-