1 - Principles & Practices¶
My Idea
Tools & Assignment
 Updated for 2019 evaluation standards!
Tasks
Updated for 2019 evaluation standards!
Tasks
- Plan and sketch a potential final project
Learning outcomes
- Communicate an initial project proposal
Have you?
- Sketched your final project idea/s
- Described what it will do and who will use it
2016¶
Copy of my 2016 website, with spelling corrections :)
Preamble¶
I am passionate about Artificial Intelligence, as such, after my gap year, I wish to study it at University.
For this reason I would like my last project to encompass and reflect this interest.
Thus I decided to make a Robotics oriented project.
The Idea¶
Programmable matter seems to hold a vast amount of potential for the future, from MIT to Intel, big corporations and researchers are striving to improve and implement this technology.
Distinguished between Claytronics & Modular Robots; my final project will concentrate on the latter.
So far I have not been able to find an open source, simple and cheap way to produce modular robots for private researchers (that fits my image of modular robots).
Thus I aim to make just that.
Plan & Sketch a Potential Final Project¶
Modular robots come in many different shapes, sizes, functionalities and abilities, using a wide verity of different forces and mechanisms to move them.
In this regard I have always been set on using magnetic (or electromagnetic) force to move them and connect them, as I believe it to be the most efficient and reliable way to hold modular robots together.
My knowledge of electromagnets is Secondary school level physics, therefore my first design might be elementary for those who know more about Physics.
I came up with my first design by imagining drilling holes in a dice and inserting iron neil’s with copper coils around them.
Sketch - Basic Working Principle
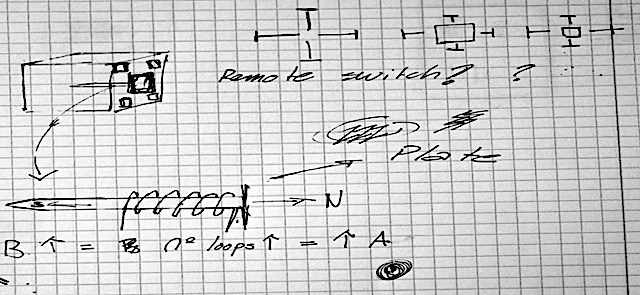
The head of the nail could act as magnetic surface for nail heads on other cubes, creating a chain. This design soon became obsolete as I researched more.
Firstly - there needed to be at least two magnetic surfaces to maintain a stable linear connection.
Secondly - a coil around an iron nail is not the most powerful and space efficient electromagnet which can be crafted.
Additional Explanation
A magnetic field is created by running electricity through a wire, and by coiling this wire around a metal core we can create a Solenoid (electromagnet).
This amplifies the strength of the magnetic field generated considerably.
The magnetic strength of a Solenoid is calculated using the following equation:
B: magnetic field strength μ: permeability of core I: current intensity flowing in the cable N: number of turns of the wire L: length of the solenoid
Therefore, the strength of an electro-magnet is variable on 2 (+1) parameters:
-
The magnetic permeability of the metal core:
measure of the ability of a material to support the formation of a magnetic field within itself1 -
The number of coils around the metal core
-
The number of layers in the metal core (like an onion)
not in the equation but it’s due to reducing eddy-current losses
Type-1¶
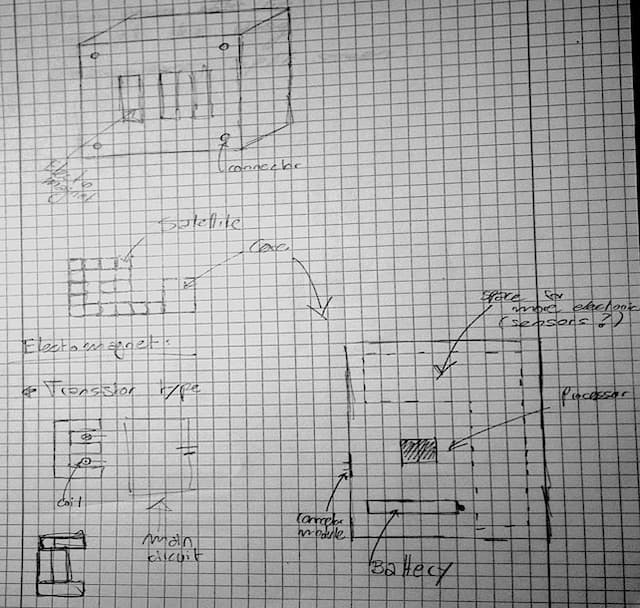
My research led me to my Type-1 satellite module:
Sketch of Type-1 External Appearance & Design
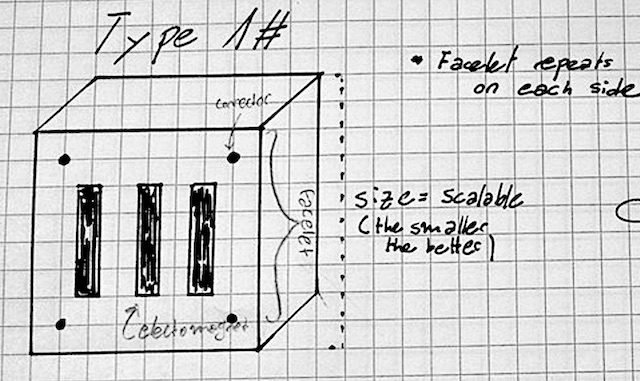
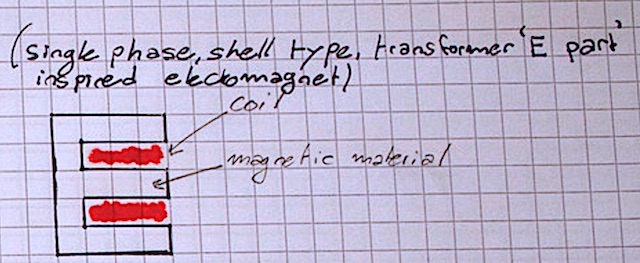
The ‘E‘ part of a transformer can become an extremely powerful electromagnet, this is mostly due to industrial construction of transformers.
It’s made of laminated (aka many layered) magnetic steel, which has a higher magnetic permeability then iron.
Additionally the primary coil of a tiny transformer contains a vastly larger amount of coils then I could every wind by hand.
Meaning it’s the ideal electromagnet for my purpose.
Type-1 Electromagnet Design
Type-2¶
The second Type-2 satellite module, I designed with inspiration from the research on modular robots by MIT students.2
Sketch of Type-2 External Appearance & Design
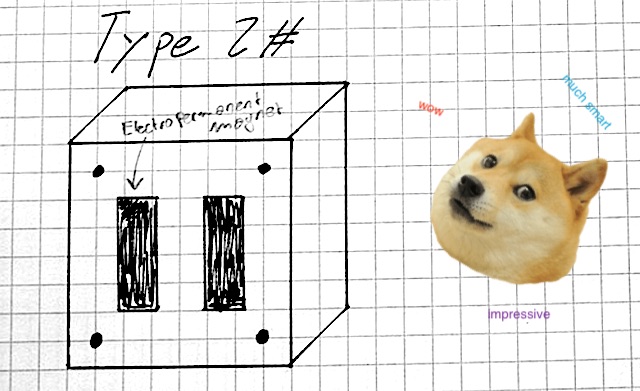
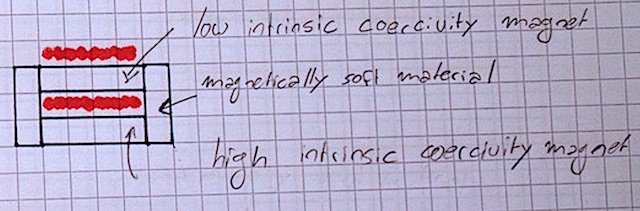
The thesis by Ara Nerses Knaian, of which Neil Gershenfeld is the supervisor, goes to great depth in explaining why Electro-permanent magnets as connectors for modular robots are far superior to Electromagnets.3
Using what I could learn about Electro-permanent magnets in about three days since I discovered them, I made a simple design for the electromagnet.
Type-2 Electromagnet Design
Until I understand what building both type entails I will not settle for one design.
…
“Legend says he’s still searching” ~ Confucius
Core VS Satellite¶
The reason why I call them satellite modules is that I wanted to bring some innovation to the world of modular robots so when I was checking out some of the videos that display or explain the existing modular robot I could not help but notice a general trend.
Everyone seems to be mimicking biological swarm behaviour, such as schooling fish, bees or ants (a form of bio-mimicry).
They therefore create small robots, each with a limited processing capacity, which are capable of acting independently of the entire group. They then make these swarms of robots perform tasks such as moving object, each robot being aware only of his closest counterparts.
To me that sounds highly inefficient since, for example, schools of fish only perform simple actions such as escaping predators or for protection.
To move an objects there are far better biological systems we can mimic, such as us humans.
My overall design is not to give each cube module any independence, they will only be part of a single unity. The Core will contain the battery, processor and transmitter, and will feed current and information to the satellite modules by the connectors.
Sketch - Core Design
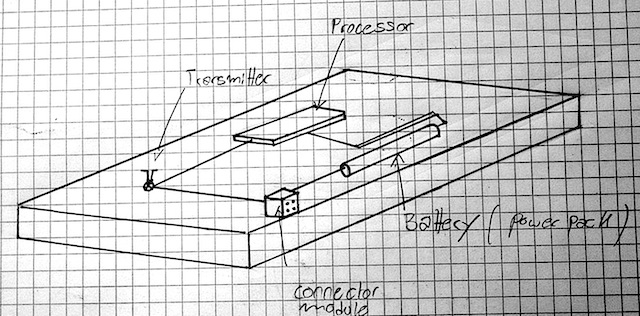
This is a very simplistic design of what my core module might look like and what it will contain. Unfortunately I am not very capable at brining out my ideas in the form of sketches
The transmitter will be needed to control which Electromagnet to switch on and off within each cube (I have not yet figured out how I will be able to remotely switch the magnets on and off).
Sketch - Switch Layout
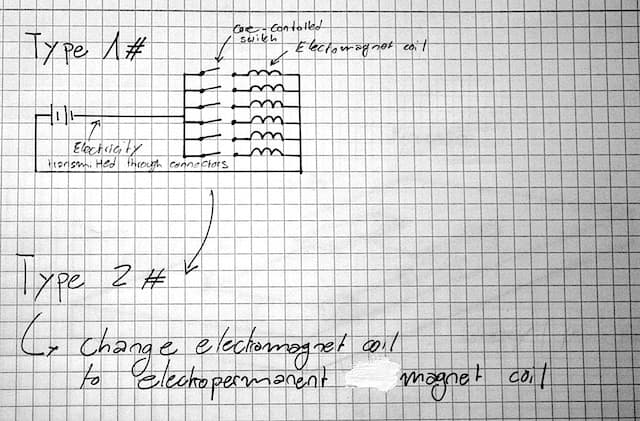
Early design of the switch layout that controls the electromagnets
The modular robot will not be the modules by themselves, but rather the entirety of the core plus all the satellites. The Core will be much larger then the satellites and will act like the Brain, while the satellites will be the limbs.
Sketch - Function overview
Early graphical representation of how the robot will function
This will decrease the size of the satellite modules significantly, increase power efficiency (I think its probably cheaper to power one large processor than many tiny ones, but I am not sure. It is definitely more convenient to charge one unit though).
Overall it will be much more intelligent, with a larger processor comes the possibility to install a stronger A.I. to guide the robot, meaning it will be much more elaborate and useful.
Sketch - Structure
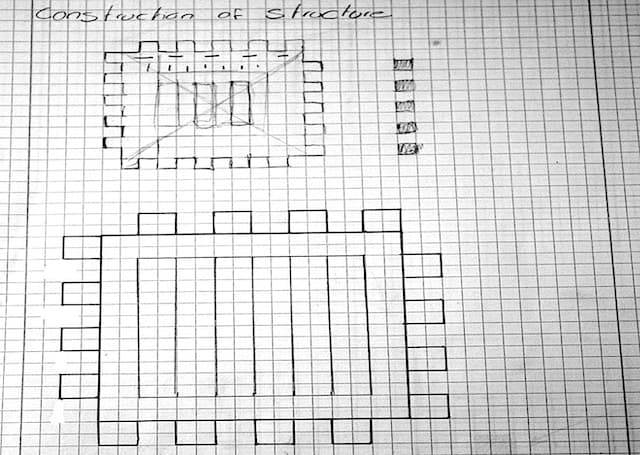
Design of panel to construct the six sides of the cubes easily
Design Flaws
-
Scale
If you’re thinking “but swarm scales well!” - you’re absolutely right.
More robots is roughly equal to more capability, in a linear fashion.
Whereas if you have a control center, like I suggest here, you hit a limit pretty early on. -
Independence
If you’re thinking “what happens when one cube breaks off the group?” - good question.
Independent cubes, with their own internal power supply, with more compute power or functionality could aid recovery.
In contrast loosing a cube in a centrally-controlled system means it’s up to the control center to do the recovery. Which may prove a lot more difficult then if the satellite could output some form of distress signal -
Failure
If you’re thinking “what happens when one cube fails?” - even better question.
Like with distributed systems, tight master-slave coupling means that if the master (in this case the core) fails, the entire system goes down, this wouldn’t be the case on a “peer-to-peer” network, where an individual failure doesn’t take down the entire system.