
In some crutial situations such as when a live bomb is detected, A bomb squad is assigned to
deal with the situation. If any accidents occur, it may lead to human life.
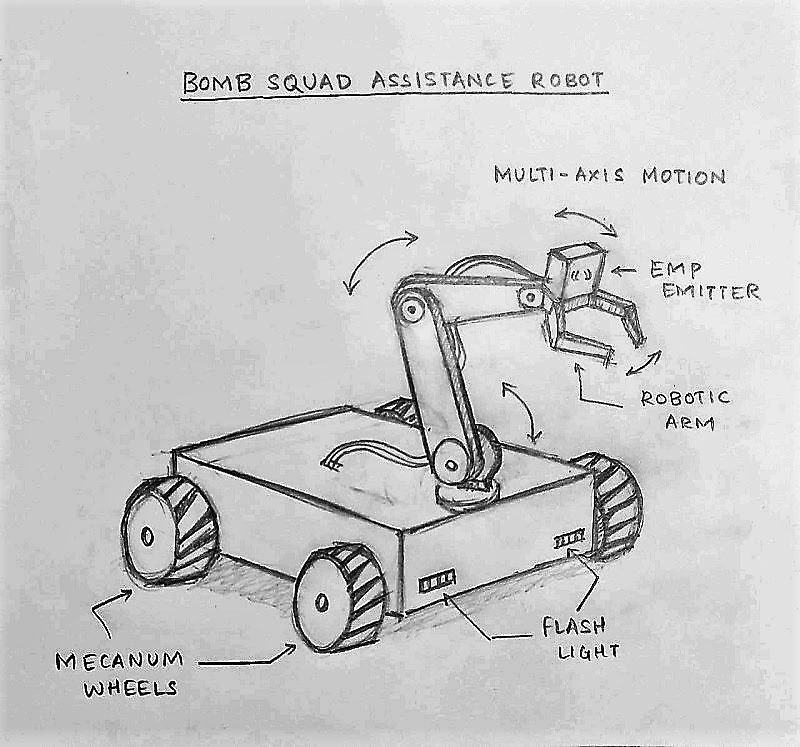
A solution needs to be designed in such a way that a robot deals with such situations.
They can be controlled Remotely by humans.
Also there should be some mechanism to pick the detected bomb and carry it to a safer place.
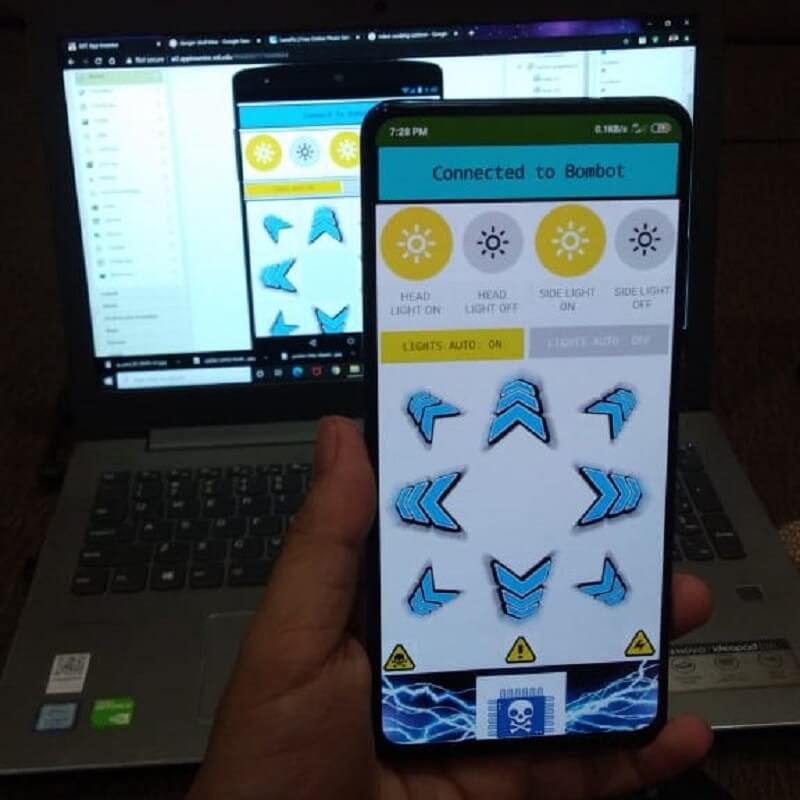
The Robot will be designed in such a way that it can be controlled
wirelessly using Radio communication or DTMF.
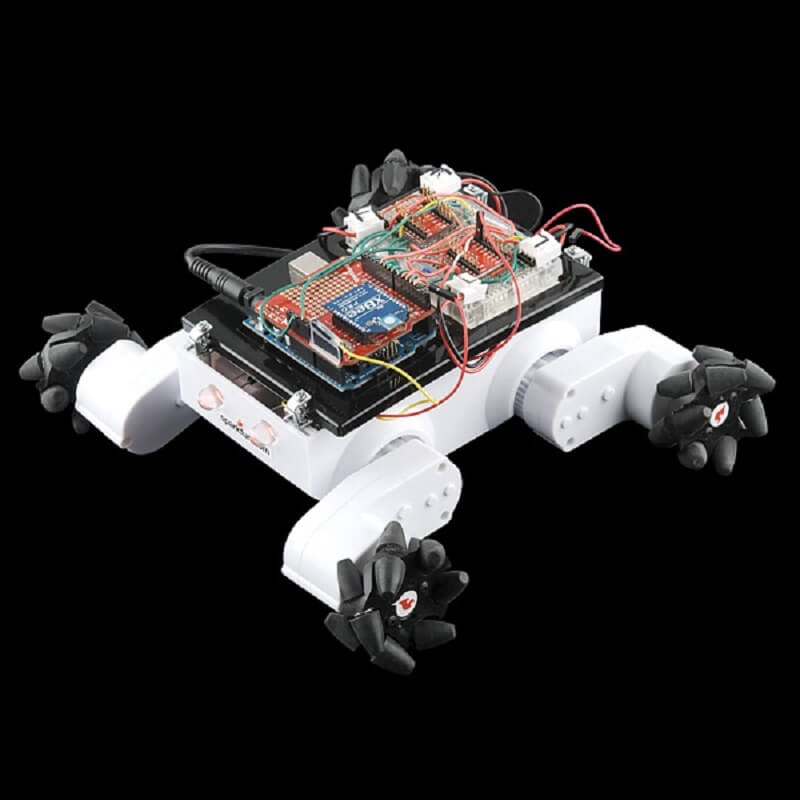
It will have Mecanum wheels which increases its mobolity to 8 Directions.
A Robotic Arm is Embedded on top of it to Pick and Place small objects.
The Robotic Arm will be controlled using Servo Motors.
An EMP Generator will be placed on the top of Robotic Arm.
It will generate an High Voltage Electo-Magnetic-Pulse through a coil.
If this pulse is transmitted in any circuit, it will currupt/destroy the circuit.
| Wheels | Regular (Normal directions) | Mecanum (Omni directional) 💎 |
| Motors | DC geared (cheaper) 💎 | Stepper (precize motion) |
| Motor Driver | L298 module (in-built regulators & heatsink) 💎 | L293d (smaller size) |
| Connectivity | Bluetooth (short range, fast) 💎 | DTMF (long rang, little lag) 💎 |
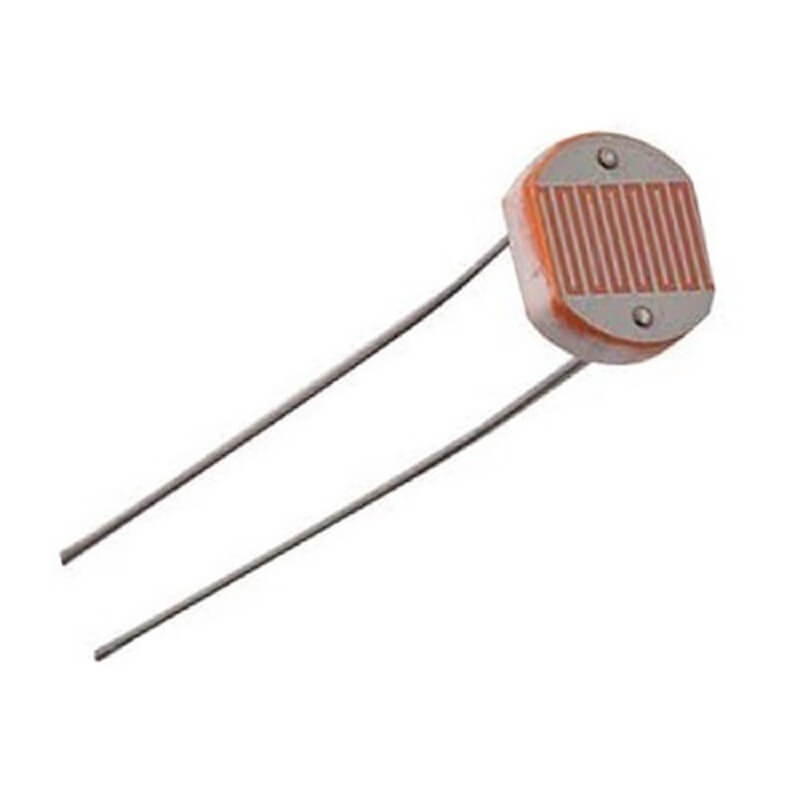
| Input sensor | IR/ Ultrasonic (depth, obstacle detection) | LDR (automatic lights) 💎 |
| Lights | Head Light (increase visibility) 💎 | other lights (Decoration) 💎 |
| Camera | Phone camera 💎 | Wifi camera |
| Battery | Li-ion 💎 | Lead Acid |
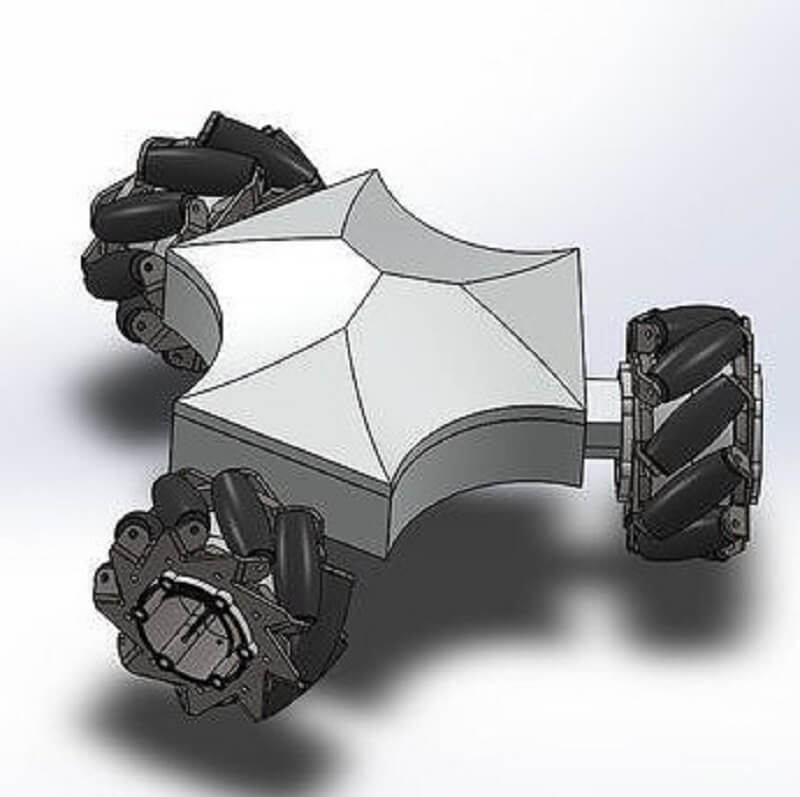
The Mecanum wheel is a omnidirectional wheel design for a land-based vehicle to move in any direction.
The Mecanum wheel is based on a tireless wheel, with a series of rubberized external rollers obliquely
attached to the whole circumference of its rim. These rollers typically each have an axis of rotation at 45°
to the wheel plane and at 45° to the axle line. Each Mecanum wheel is an independent non-steering drive wheel
with its own powertrain, and when spinning generates a propelling force perpendicular to the roller axle,
which can be vectored into a longitudinal and a transverse component in relation to the vehicle.
Running all four wheels in the same direction at the same speed will result in a forward/backward movement,
as the longitudinal force vectors add up but the tranverse vectors cancel each other out;
Running (all at the same speed) both wheels on one side in one direction while the other side in the opposite
direction, will result in a stationary rotation of the vehicle, as the transverse vectors cancel out but the
longitudinal vectors couple to generate a torque around the central vertical axis of the vehicle;
Running (all at the same speed) the diagonal wheels in one direction while the other diagnoal
in the opposite direction will result in a sideway movement, as the transverse vectors add up but the longitudinal
vectors cancel out.
A mix of differential wheel motions will allow for vehicle motion in almost any direction with any rotation.
An electromagnetic pulse (EMP), also sometimes called a transient electromagnetic disturbance,
is a short burst of electromagnetic energy. Such a pulse's origin may be a natural occurrence or
man-made and can occur as a radiated, electric, or magnetic field or a conducted electric current,
depending on the source.
EMP interference is generally disruptive or damaging to electronic equipment, and at higher
energy levels a powerful EMP event such as a lightning strike can damage physical objects such as
buildings and aircraft structures.
About this circuit
more..
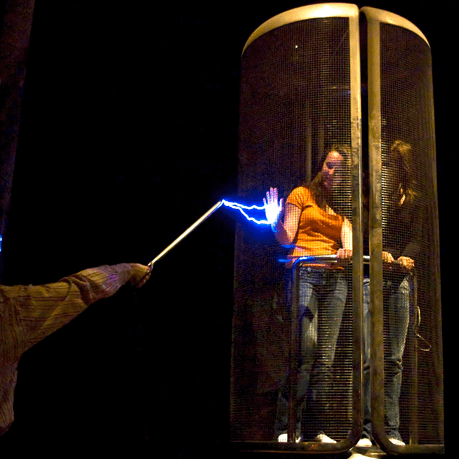
A Faraday cage or Faraday shield is an enclosure used to block electromagnetic fields.
A Faraday shield may be formed by a continuous covering of conductive material, or in the
case of a Faraday cage, by a mesh of such materials. Faraday cages are named after
scientist Michael Faraday, who invented them in 1836.
A Faraday cage operates because an external electrical field causes the electric
charges within the cage's conducting material to be distributed so that they cancel the
field's effect in the cage's interior. This phenomenon is used to protect sensitive electronic
equipment (for example RF receivers) from external radio frequency interference (RFI) often
during testing or alignment of the device. Faraday cages are also used to enclose devices that
produce RFI, such as radio transmitters, to prevent their radio waves from interfering with nearby
sensitive equipment. They are also used to protect people and equipment against actual electric
currents such as lightning strikes and electrostatic discharges, since the enclosing cage conducts
current around the outside of the enclosed space and none passes through the interior.
Bluetooth is a wireless technology standard used for exchanging data between fixed and mobile devices
over short distances using short-wavelength UHF radio waves in the industrial, scientific and medical radio bands,
from 2.402 GHz to 2.480 GHz, and building personal area networks (PANs). It was originally conceived as a
wireless alternative to RS-232 data cables.
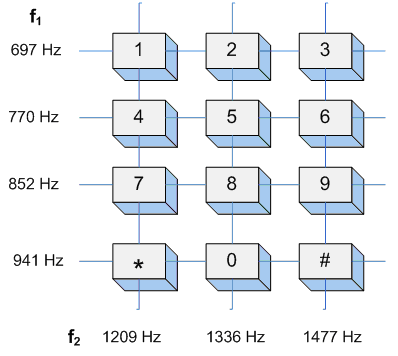
Dual-tone multi-frequency signaling (DTMF) is a telecommunication signaling system using the voice-frequency band over telephone lines between telephone equipment and other communications devices and switching centers. DTMF was first developed in the Bell System in the United States, and became known under the trademark Touch-Tone for use in push-button telephones supplied to telephone customers
A light-emitting diode (LED) is a semiconductor light source that emits light when current flows through it. Electrons in the semiconductor recombine with electron holes, releasing energy in the form of photons. The color of the light (corresponding to the energy of the photons) is determined by the energy required for electrons to cross the band gap of the semiconductor. White light is obtained by using multiple semiconductors or a layer of light-emitting phosphor on the semiconductor device.
Photoresistors are less light-sensitive devices than photodiodes or phototransistors: the two latter components are true semiconductor devices, while a photoresistor is an active component that does not have a PN-junction. The photoresistivity of any photoresistor may vary widely depending on ambient temperature, making them unsuitable for applications requiring precise measurement of or sensitivity to light photons.
elit
acc
| HC-05 bluetooth | with 3.3v for Rx | Rx, Tx pins |
| Motor Driver A | enable shorted | 4 Digital Output pins |
| Motor Driver B | enable shorted | 4 Digital Output pins |
| EMP emitter | with Relay circuit & LED indicator | 1 Digital Output pin |
| DTMF | with mobile + active simcard | 4 Digital Input pins |
| Head Lights | with transistor as switch | 1 Digital Output pin |
| Other Lights | with transistor as switch | 1 Digital Output pin |
| LDR | with 10k resistor | 1 Digital Input pin |
| Extra | for future addition | SCL, SDA |
| Microcontroller | On board | |
| Bluetooth | On board | |
| DTMF module | On board | |
| Relay with driver | On board | |
| Motor Driver A | On board | |
| Motor Driver B | On board | |
| Motors | out (with Extension) | |
| Head Led | out (with Extension) | |
| Other Led | out (with Extension) | |
| LDR | out (with Extension) | |
| SCL, SDA pins | out (with Extension) | |
| Power Switch | out (with Extension) |








{kind=link}
{kind=link}
{kind=link}