13. Applications and implications¶
I am moving forward with the data visualization project.
What it will do?¶
The project will spin a propeller of RGB LEDs creating a circle of light bue to persistance of vision. The circle will change colors and size to visualize the changes in water height of the water at Lake Houston.
Who has done what beforehand?¶
My Fab Academy project is inspired by many different artist. I haven’t seen any projects exactly like this before but I like projects that use real information. I might try to make my own water sensor although in Neil’s words the water sensor is a potential second project. For the sake of Fab Academy I am going to focus on the data visualization robot and stream the lake level from a the USlake.info site.
Physically converts waves to sounds. Waterfront Step Organ
Converts an image to low-fi wooden pixels. Daniel Rozin
{kind=link}
Creates designs with large round pixels. Lighting Design Collective
Final Project Requirements¶
- Create your own integrated design
- Demonstrate 2D & 3D modelling capabilities applied to your own designs
- Select and apply appropriate additive and subtractive techniques
- Demonstrate competence in design, fabrication and programming of your own fabbed microcontroller PCB, including an input & output device
Below I describe how the project contains each aspect required to demonstrate my proficiency with all the Fab Academy processes.
What will you design?¶
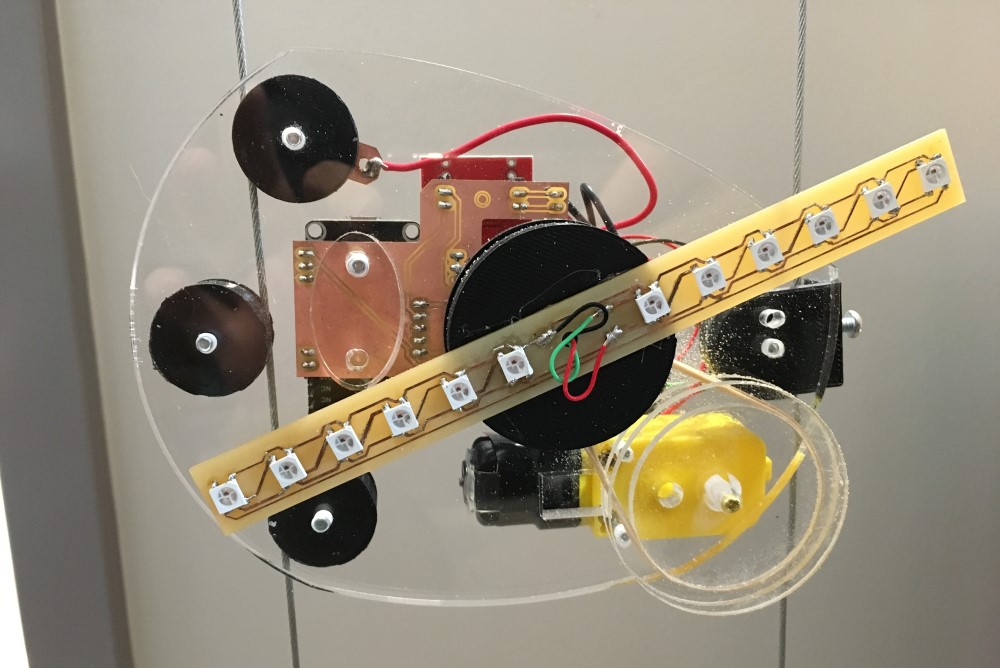
In the image below you can see what I have started designing for the visualization bot. The project contains a custom PCB propeller with neo pixels, black 3D printed parts to pull power from the metal cables with v-groove bearing, clear laser cut acrylic body, and a wifi board to pull reading from a database. I want the propeller to have RGB capabilities and th neo pixels will allow me to only need to route a power, ground, and data toeach LED. If I used a basic RGB LED I would need to run seperate data pins to each color and would make the propeller too bulky.
This image is a prototype I started after I designed all the parts in the computer aided design week. I used a motor driver and premade ESP8266 to test the functionality of the slip ring and LED propeller.
I’m excited to experiment with the bearings as a way to transfer power. These robots are static on the cables but I hope in a future project I will be able to use the bears to transfer power when objects are moving.
What materials and components will be used?¶
Material Per Bot¶
Acrylic - $1
PLA filament - $0.10
ESP8266 - $3.34
v-groove bearing - $0.40
Metal Cable & Turn Buckles - $1.80
NeoPixels - WS2812B - $5.94 for 12 ($4.95 per 10 pack)
FR1 Copper Clad - $.75 (50% - 4x6 sheet)
3/4” Sanded Plywood - $4 (1/8 - 1 sheet)
DC Motor - $3.75
Total cost per bot: $21.08
2D & 3D Modeling¶
I started by modeling everything in SOLIDWORKS and exporting some of the model faces as DXF file to cut on the laser cutter. The spacing of all the screw holes was done in SOLIDWORKS. Then, I imported the screw hole measurements into Corel Draw 2D vector program to create the more organic shape of the body that was cut on the laser.
Additive and Subtractive¶
I thin it will be critical to use both additive and subtractive processes for this project.
The small bearing holders and plastic v-groove bearings will be 3D printed. The 3D printing shoud be a huge cost savings.
The wooden frame to stretch the cables to suspend the robots will be made via subtractive processes on the shopbot. The Roland mill will also be used to make the PCB propeller and board to hold the ESP8266 and control the motor.
Programming¶
Finally, the programming will probably be the most complicated part. IIt looks like this article might be a goodonline tutorials showing me how to stream data from the internet. One benefit of using the esp8266 is that there are a ton of tutorials online. I am planning to use get http protocol to post and retrieve information from the database.
How will it be evaluated?¶
For this project to be successful in my eyes, the robotic installation will need to seemlessly connect to the internet, read data and make real-time changes to the LEDs. Ultimately, I hope the project can be documented well enough that this project can be used to teach other people about digital fabrication.
Big Questions¶
Will the bearing and cables conduct enough electricity to power all bots?
Can I read the data from exhisting water level data online?
How long will the slip rings last spinning?
Will people be able to understand the changes and connect it to the change in water level?
Project Plan¶
Use networking week to start developing a ESP8266 board that read information, control NEO pixels and control a motor.
Use the group project to expand on Output week and develop a better understanding of servo or DC motors.
Use application programming week to explore controlling hardware with variable through serial.
These are the main parts of the projects I am foggy on and could stand to learn more in order to accomplish my final project.