✦ Interface and Application Programming
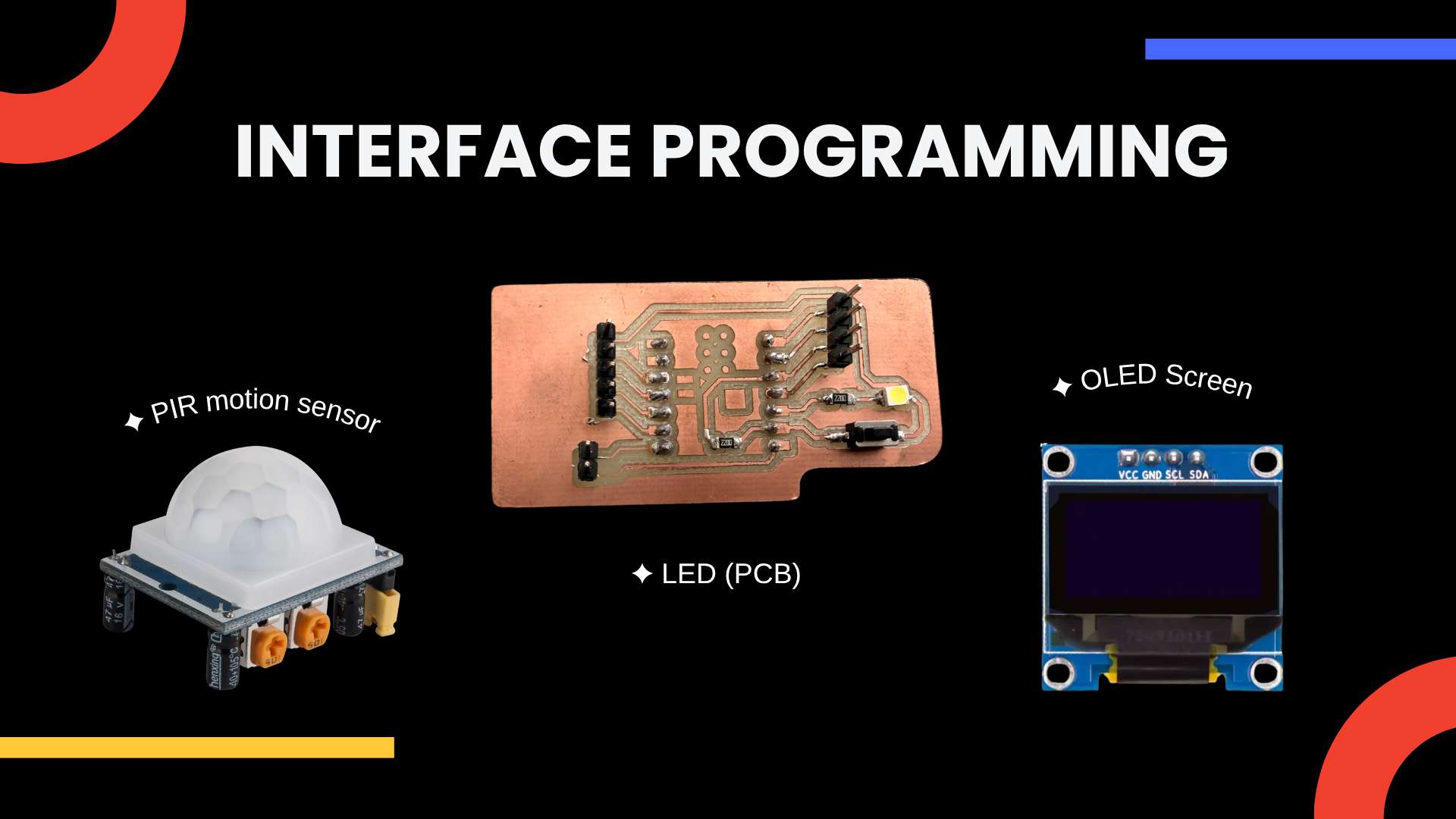
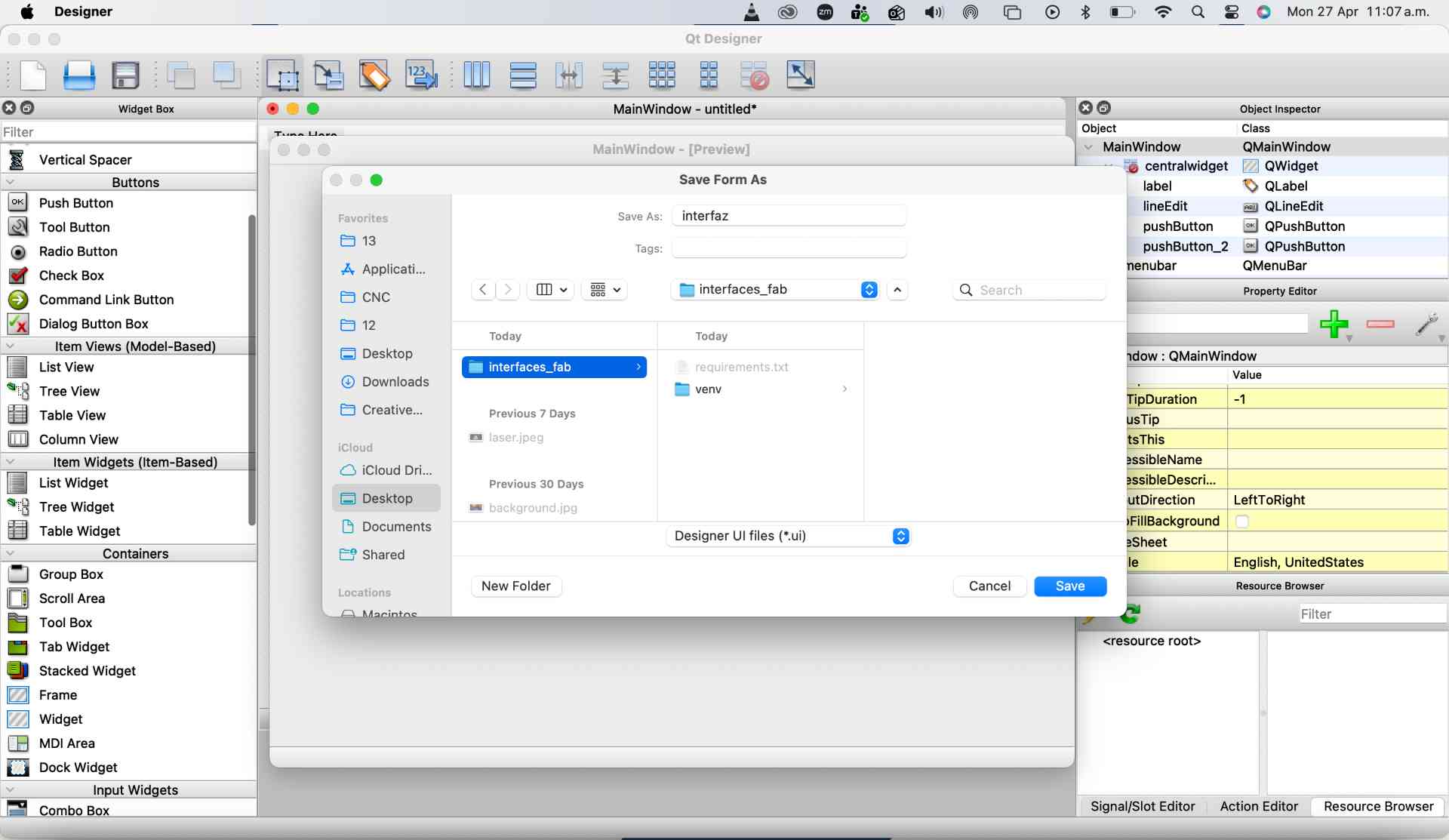
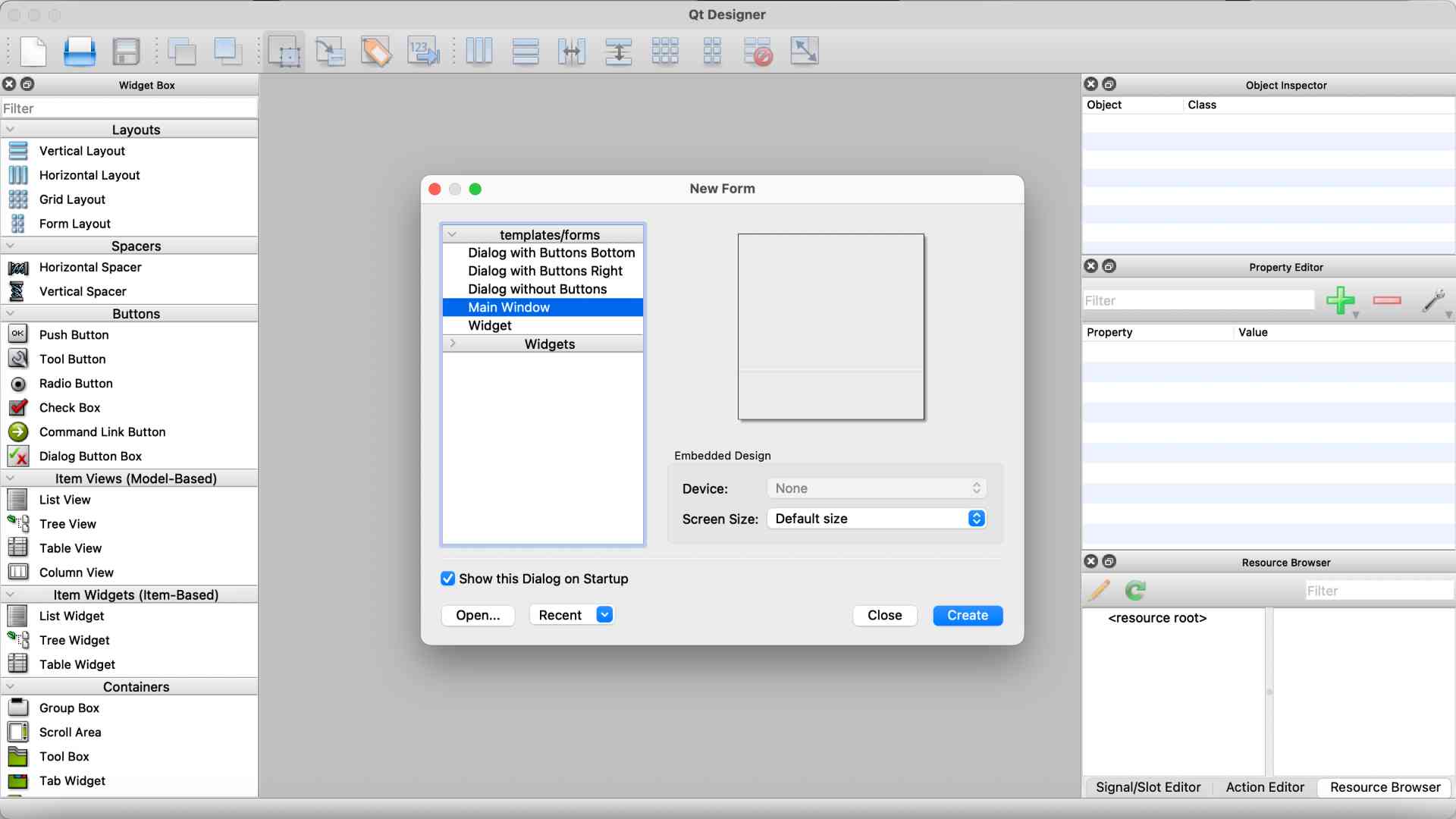
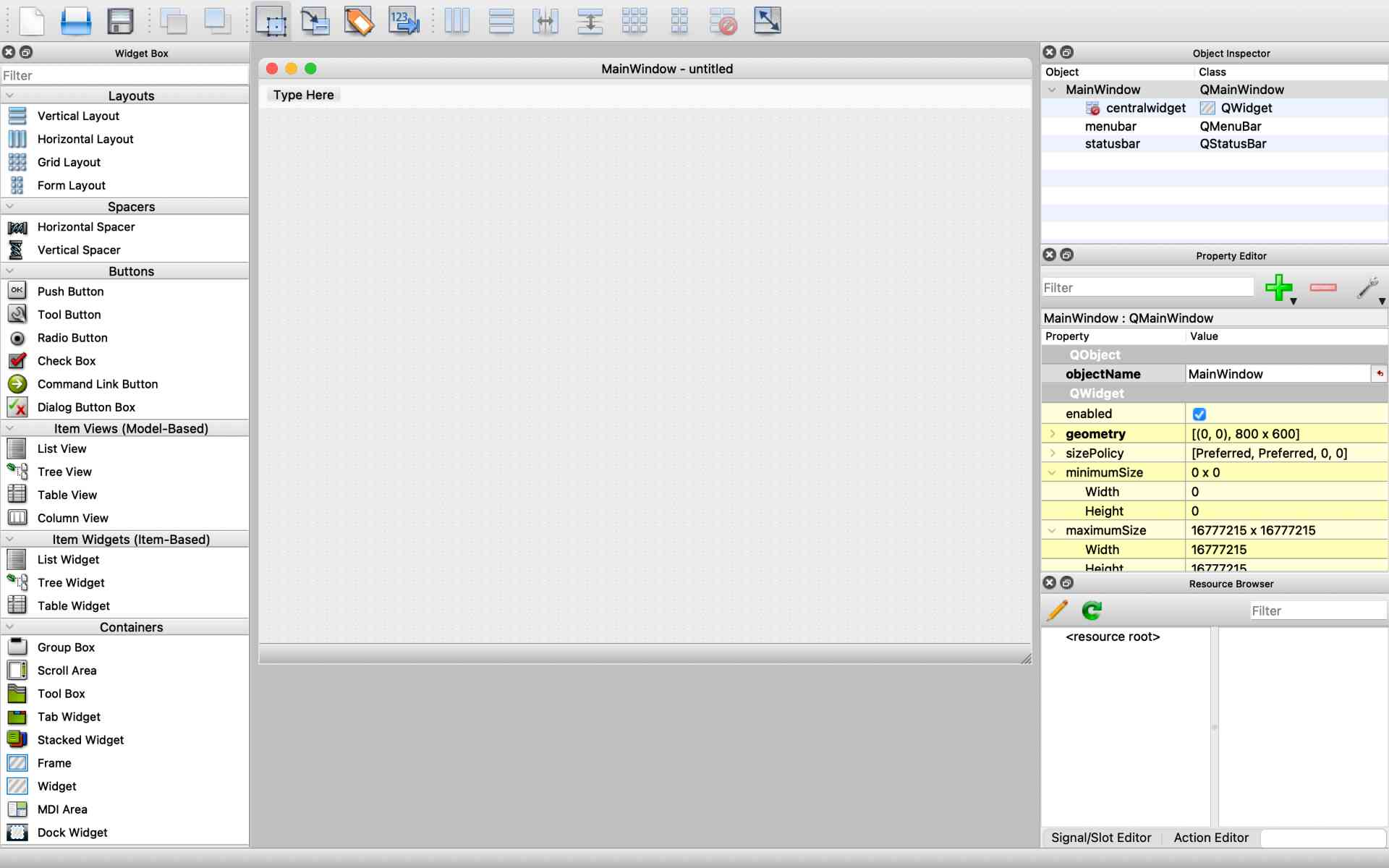
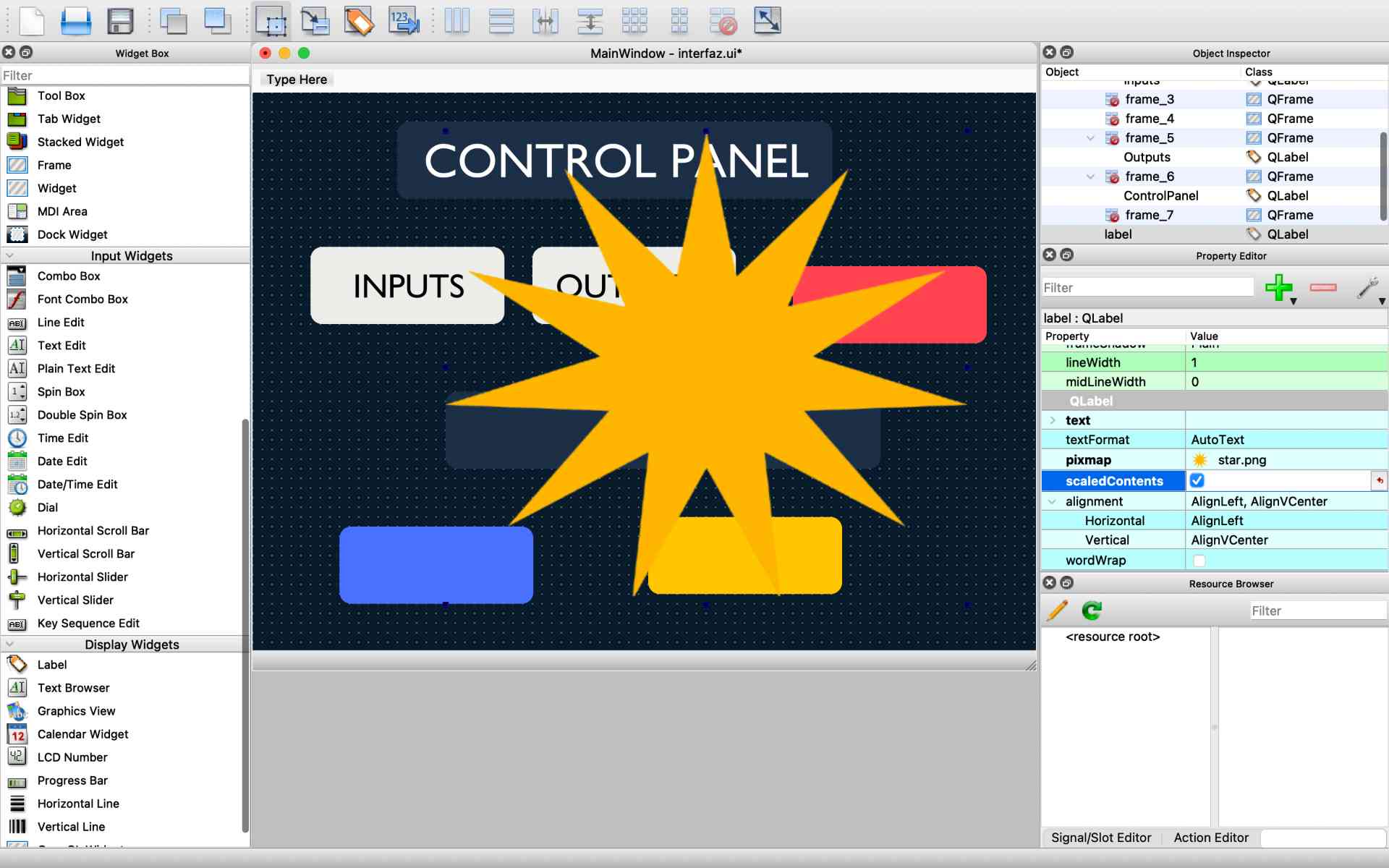
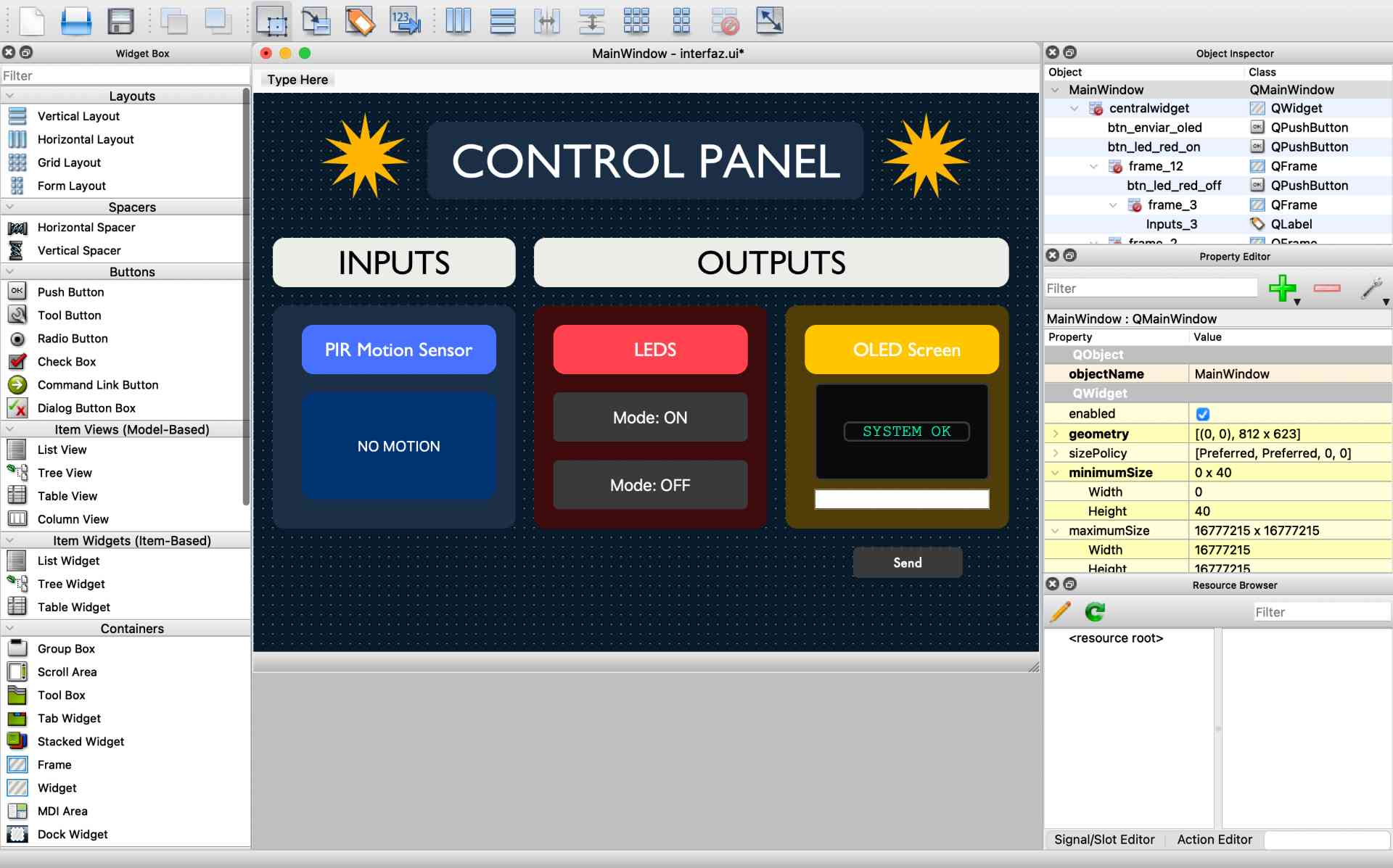
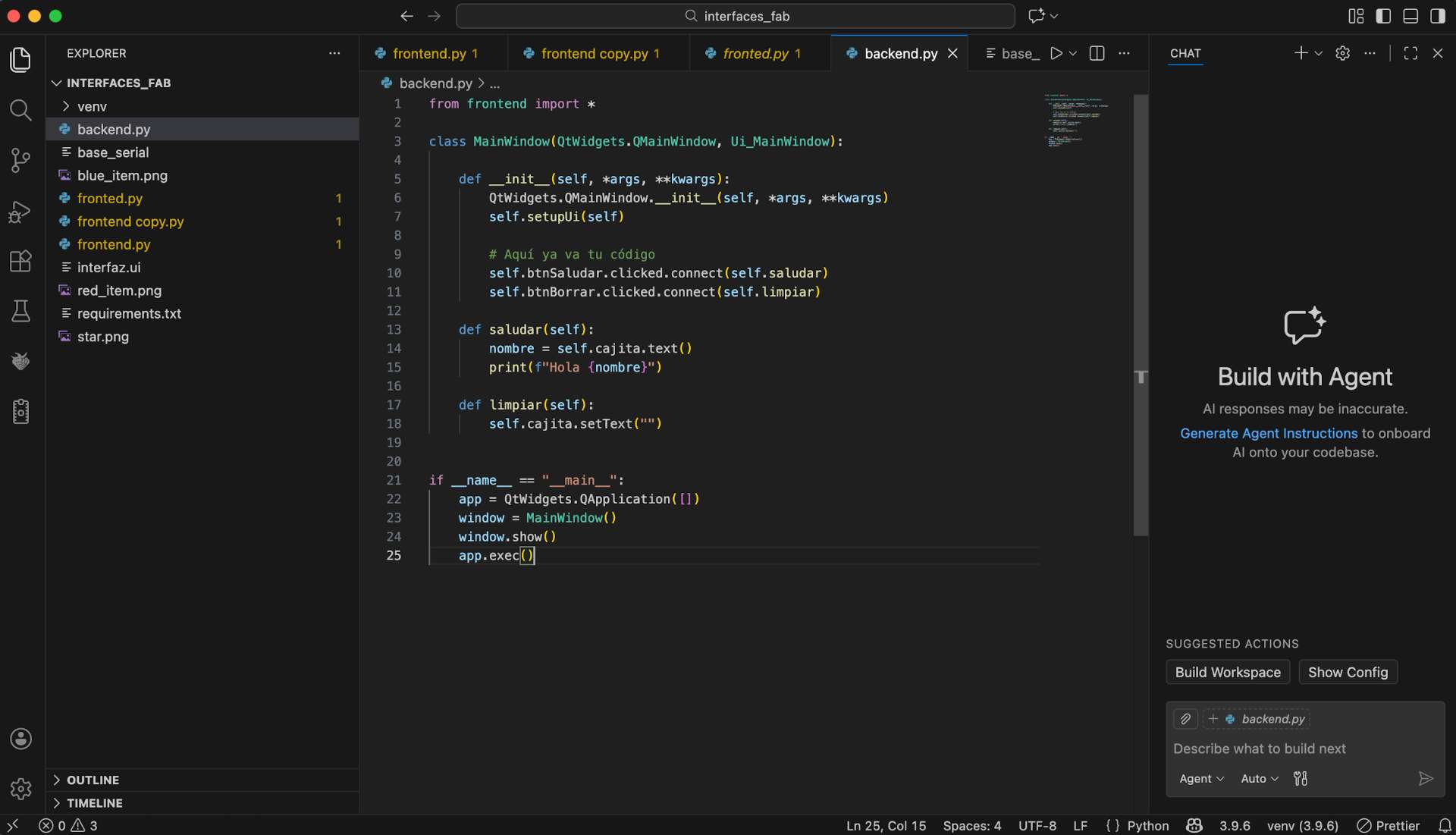
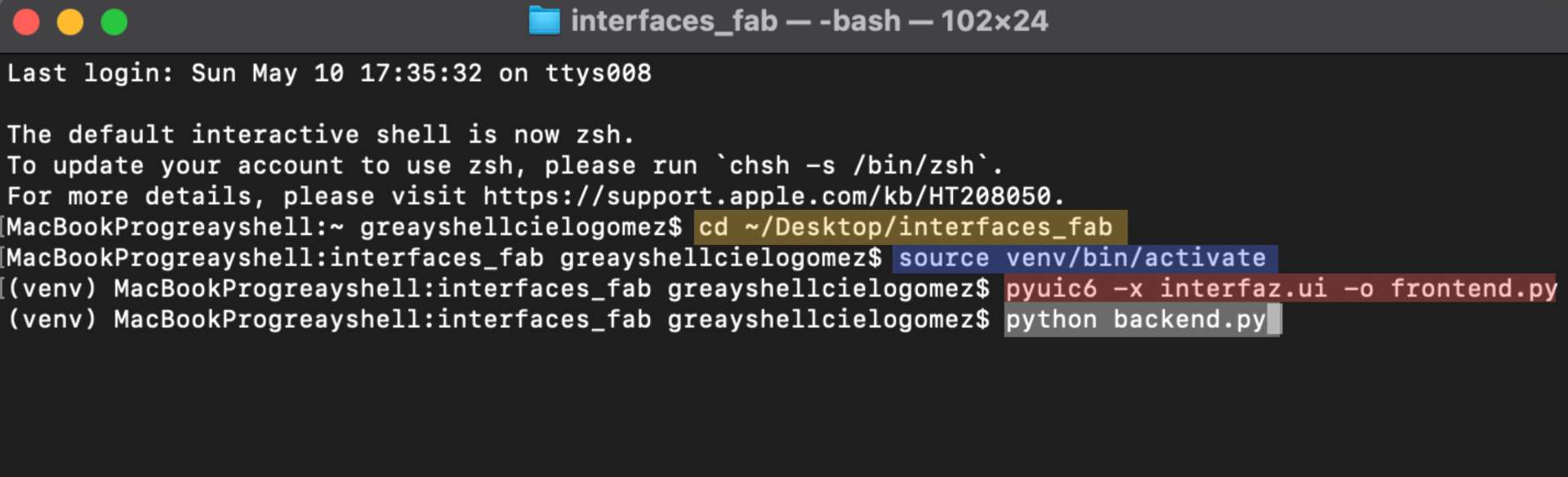
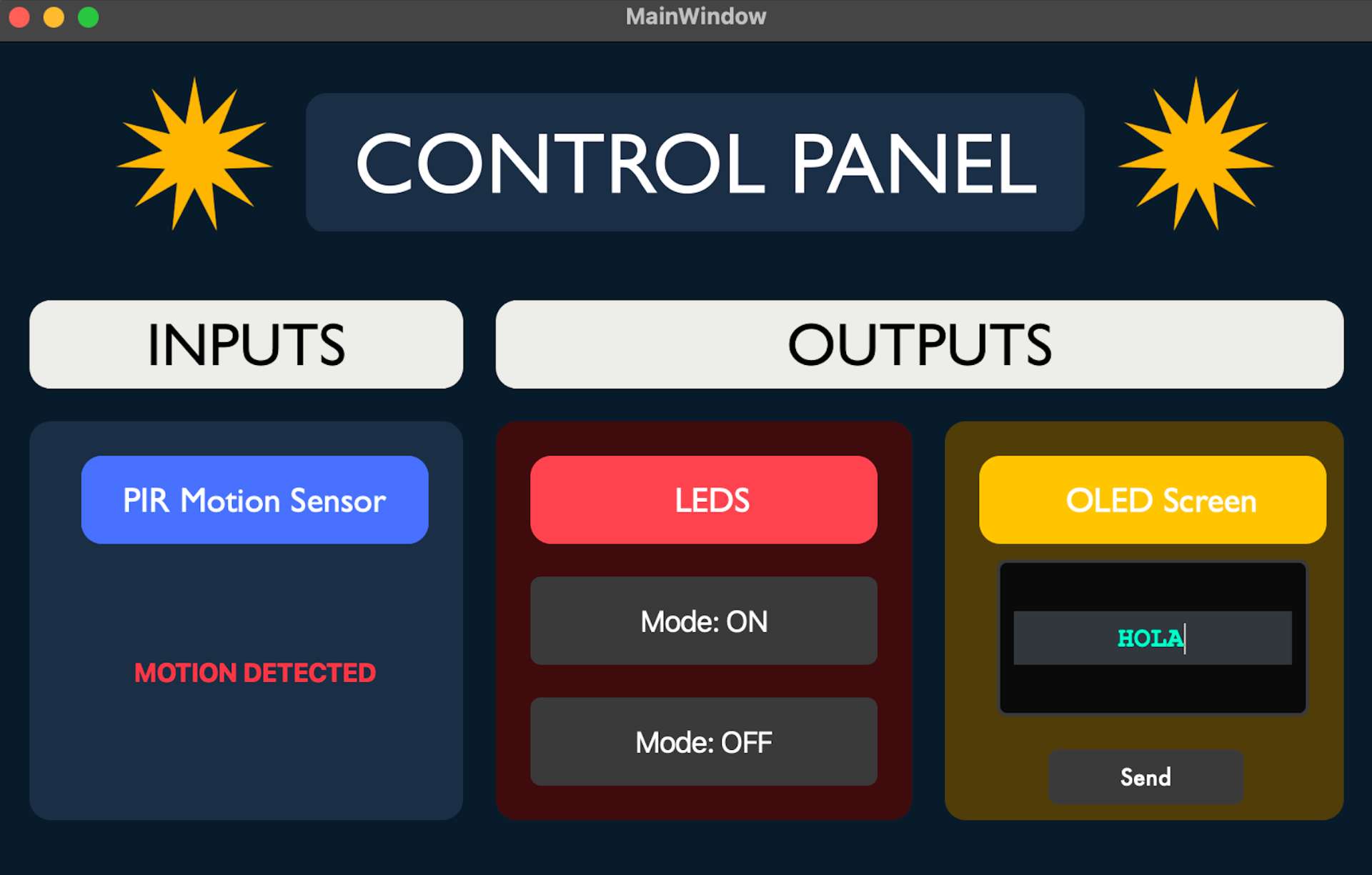
For this week, I developed a custom control panel using Python and Qt Designer to interact with my Seeed XIAO ESP32-C6 board that I designed in Week 11. The interface was designed to read input data from a PIR motion sensor and control different outputs, including a LED and an OLED screen. The goal was to create a visual interface that could communicate with the physical circuit through serial communication, allowing the computer and the microcontroller to exchange information in real time. For this week I will be consulting our Group Assignment.