Week12
Week 12 Group assignment:¶
- Design a machine that includes mechanism + actuation + automation + application
- Build the mechanical parts and operate it manually
- Actuate and automate your machine
- Document the group project
Movie¶
machinebuilding.mp4, 1080p HTML5, < 1 minute, < ~25 MB
One page slide¶
 presentation.png, 1920x1080
presentation.png, 1920x1080
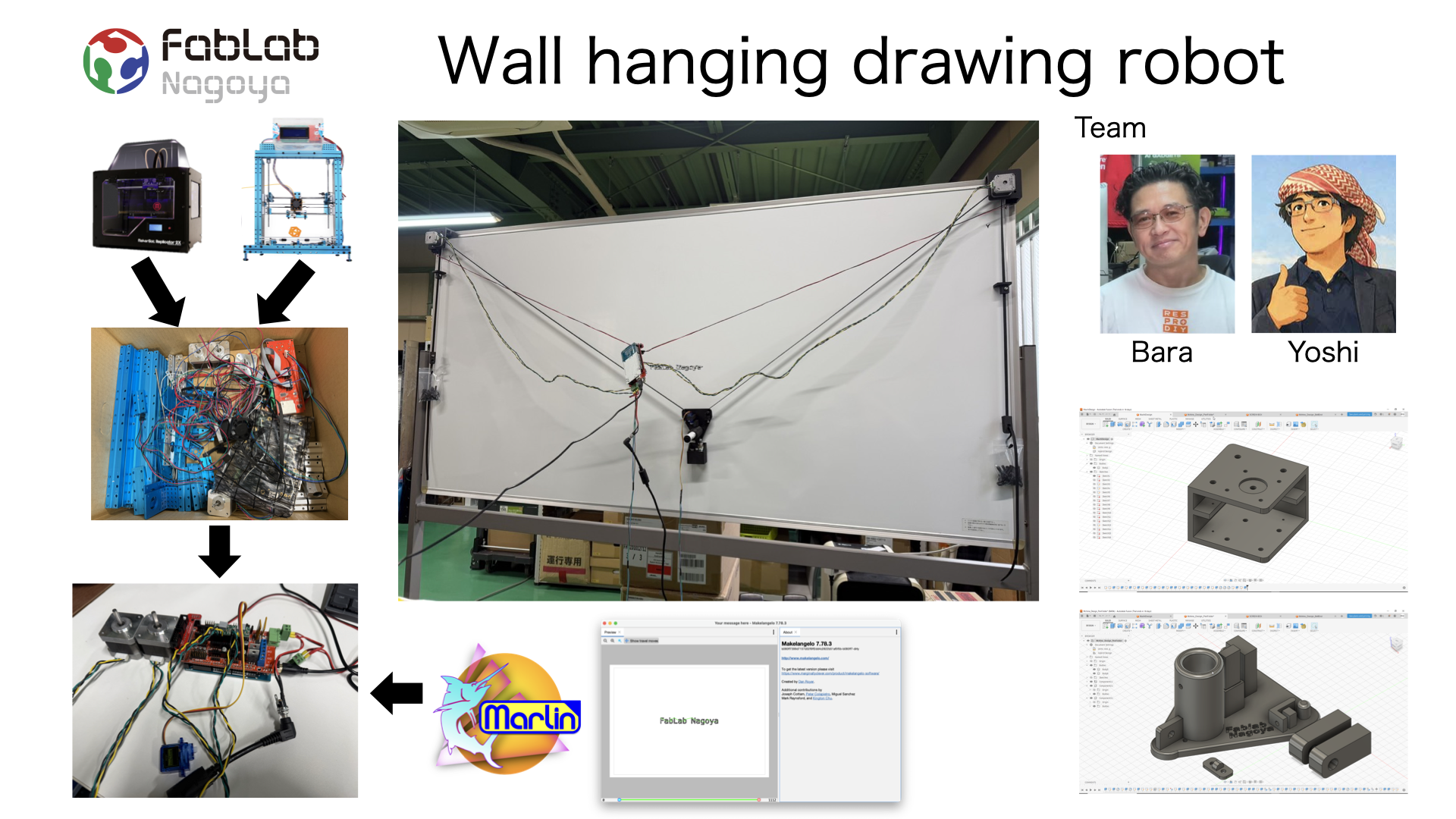
Wall hanging drawing robot¶
Since there are not so many dates to design and build, and we both are busy on Apr, we tried to find suitable size project. And finally agreed to go with “wall hanging drawing robot”.
Yoshi have a knowledge about NC machine through his RepRap building experience. So Yoshi is in charge of Electronics and firmware building. Bara have enough experience to edit movie, so Bara is in charge of making movie and 3D printed parts.
Schedule¶
| Item | Responsible | Planned | Actual |
|---|---|---|---|
| Idea, Task assaign | Both | - | 25 Feb |
| Recycling | Yoshi | - | 28 Mar |
| 3D printed parts | Bara | - 16 Apr | 21 Apr |
| Electronics | Yoshi | - 16 Apr | 14 Apr |
| Firmware | Yoshi | - 16 Apr | 16 Apr |
| Integration testing | Both | 20 Apr | 21 Apr |
| Documentation | Both | 21 Apr | 22 Apr |
Process¶
First, we decided to divide the tasks according to each person’s strengths. Bara is in charge of 3D printed parts and making movie. Yoshi is in charge of electronics and firmware, software.
We proceeded with the plan of each of us completing our assigned tasks, and then performing integration testing and making minor adjustments at the end.
Preparing - Yoshi¶
We don’t want to buy components just for one time project. So Yoshi brought his discarded 3D printer as parts donor. So steppers, Arduino Mega, RAMPS, stepper drivers was took from that discarded printer. We only purchased timing belt.
Details are here.
Software, Wiring - Yoshi¶
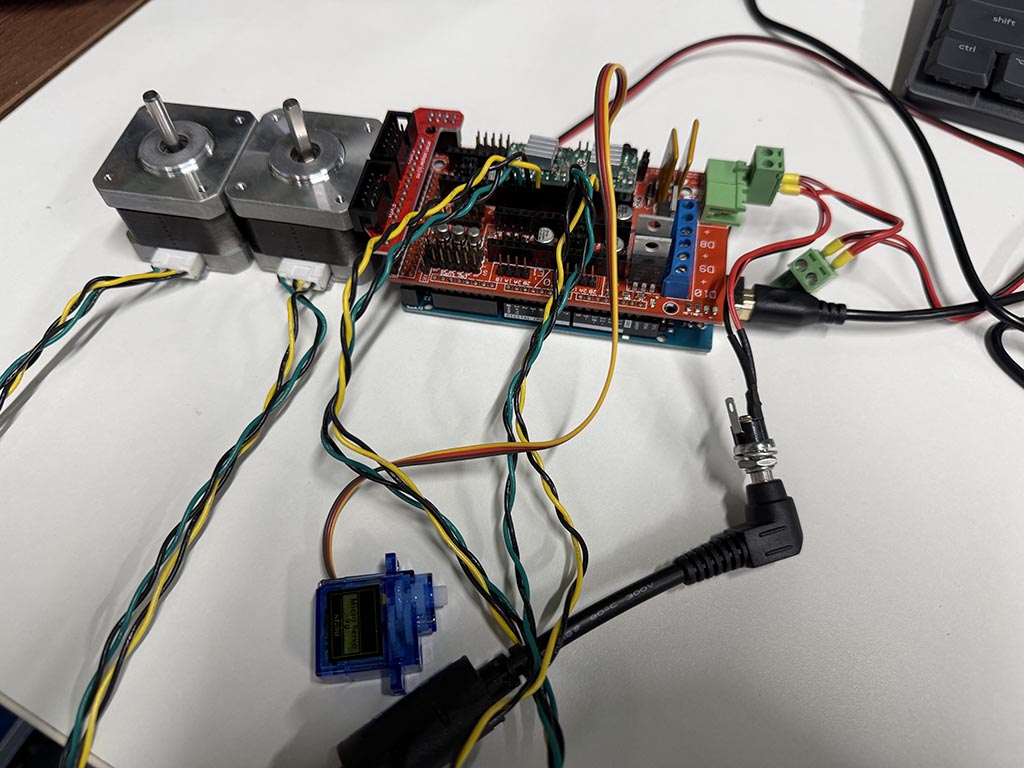
Yoshi tried to find solution and here are we use.
3D printed parts - Bara¶
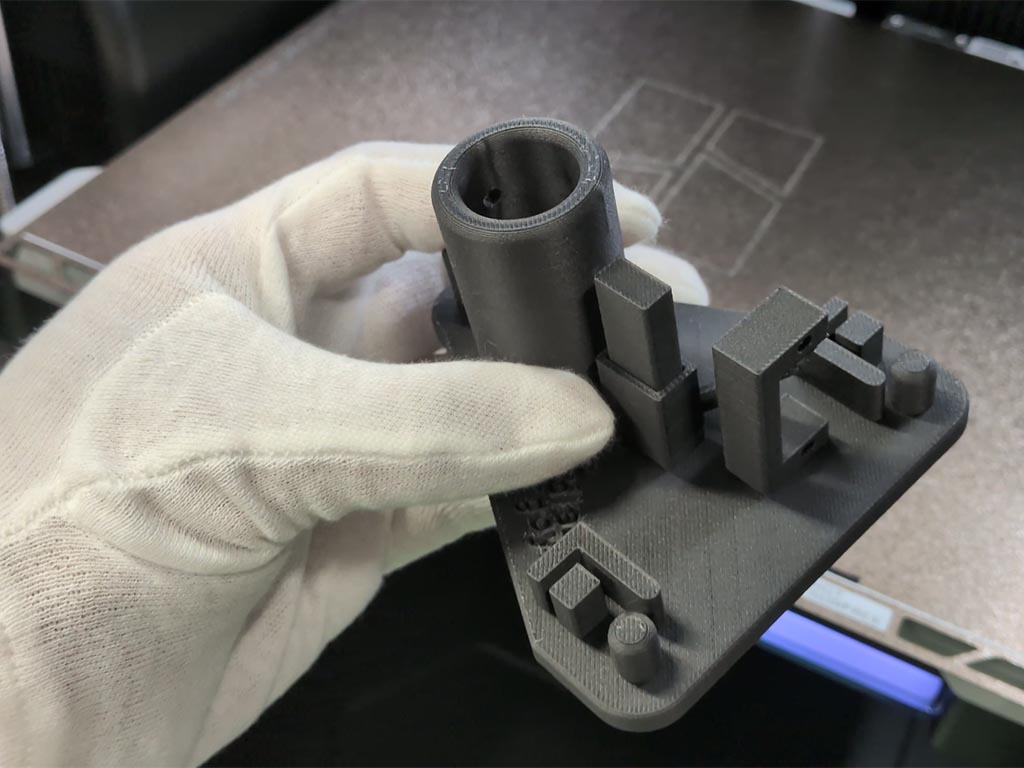
Bara design and 3D printed stepper mount, pen holder and other required parts.
Details are here
Integration testing - Both of us¶

It was so smooth. It works at first time.
Problems¶
It worked at first integration testing!!
Possible improvements¶
- Because the head shakes during movement, the plot also shakes.
Solution: Better to suppress shaking by parameter tune and weight balance. - Pen up move too quick.
Solution: Changing material and looking for parameter.
Design files¶
- Fusion: W12_MachiDesign.f3d, W12_SCREW-BOX.f3d, W12_Mchine_Design_PenFolder.f3d, W12_Mchine_Design_BeltEnd.f3d
- Marlin source: W12_Marlin.zip