Week 12
Mechanical Design, Machine Design
Have you answered these questions?
- I. Documented the machine building process to the group page ✅
- II.Documented your individual contribution to this project on your own website ✅
- III.Linked to the group page from your individual page as well as from group page to your individual pages ✅
- IV.Shown how your team planned, allocated tasks and executed the project (Group page)✅
- V. Described problems and how the team solved them (Group page) ✅
- VI.Listed possible improvements for this project (Group page)✅
- VII.Included your design files (Group page)✅
- VIII.You need to present your machine globally and/or include a 1 min video (1920x1080 HTML5 MP4) + slide (1920x1080 PNG) (Group page)✅
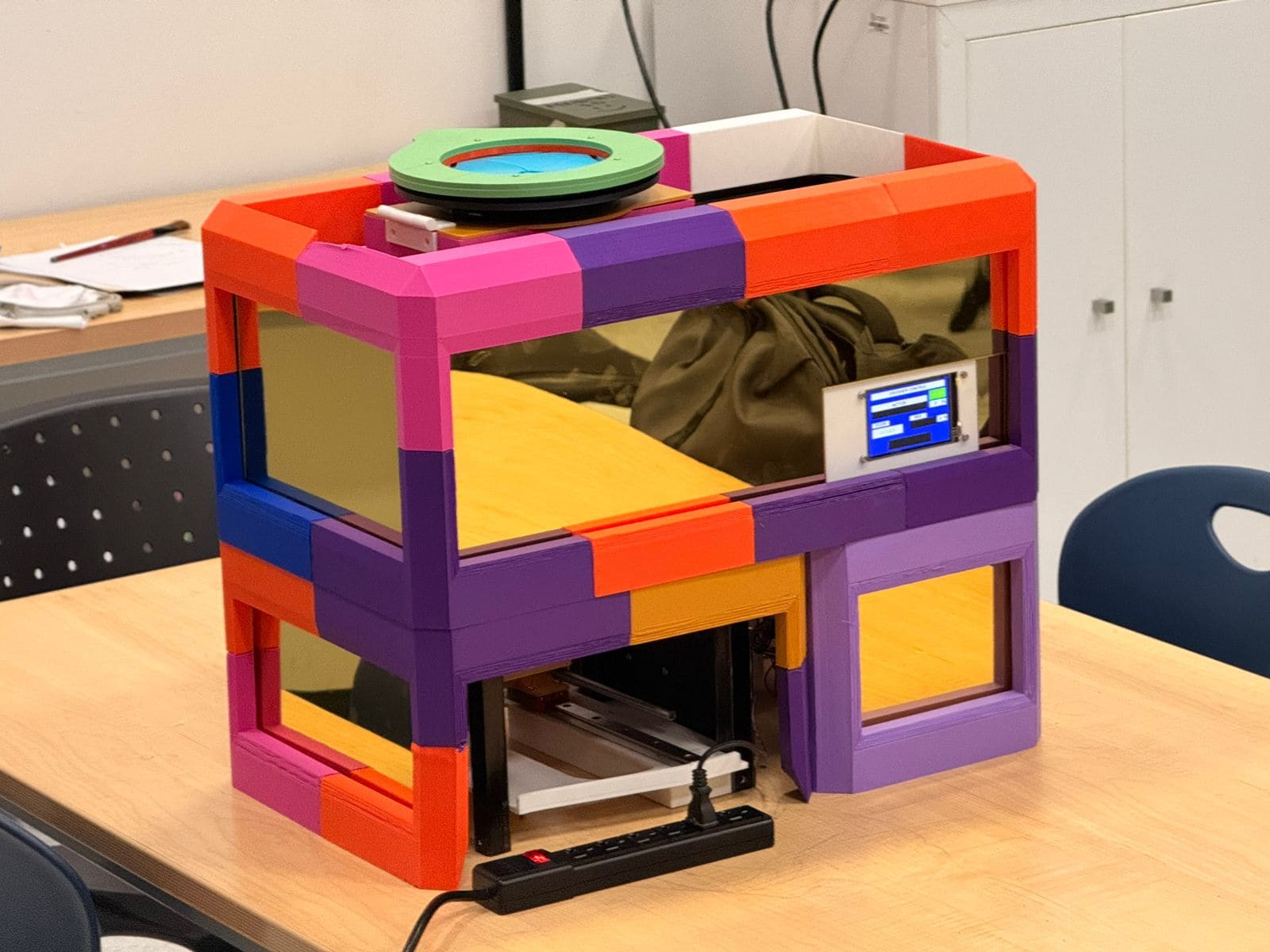
Hero Shot
The Hero Shot presents the final integrated BIOCRUSHER machine, showcasing the combination of mechanical structure, shredding system, electronics, sensors, automation, and biomaterial processing workflow. The machine integrates custom-designed shredding blades, transmission mechanisms, an ESP32-based control system, and structural components fabricated using digital manufacturing technologies such as 3D printing and CNC machining. This final prototype demonstrates the successful integration of mechanical engineering, electronics, automation, and sustainability into a functional biomaterial production system.
The final machine reflects the collaborative work of the entire team in developing a complete engineering solution capable of processing Amazonian fibers into Bio-Paper. BIOCRUSHER was designed not only as a functional prototype but also as an educational and open-source platform that promotes circular economy principles and sustainable fabrication. The Hero Shot highlights the project as a finished product ready for testing, demonstration, and future development.
Group Assignment:
°Design a machine that includes mechanism + actuation + automation + application
° Build the mechanical parts and operate it manually
° Actuate and automate your machine
° Document the group project
1. Introduction
BIOCRUSHER is a semi-automated bio-machine designed for processing Amazonian natural fibers to produce sustainable biomaterials such as Bio-Paper. The project combines digital fabrication, biomaterials research, electronics, and automation to create an accessible and low-cost machine capable of transforming agricultural waste into reusable ecological materials. Inspired by the Peruvian Amazon ecosystem, the machine processes fibers such as banana trunk, coconut fiber, yuca, and pineapple residues through shredding, cooking, blending, and sheet formation stages.
The project integrates mechanical systems, custom electronics, embedded programming, and digital manufacturing processes including 3D printing, CNC machining, laser cutting, and PCB fabrication. BIOCRUSHER was developed collaboratively to promote sustainability, education, circular material use, and technological accessibility for communities interested in biomaterial production. This assignment allowed our team to explore how engineering and digital fabrication can support environmental innovation and local resource utilization.
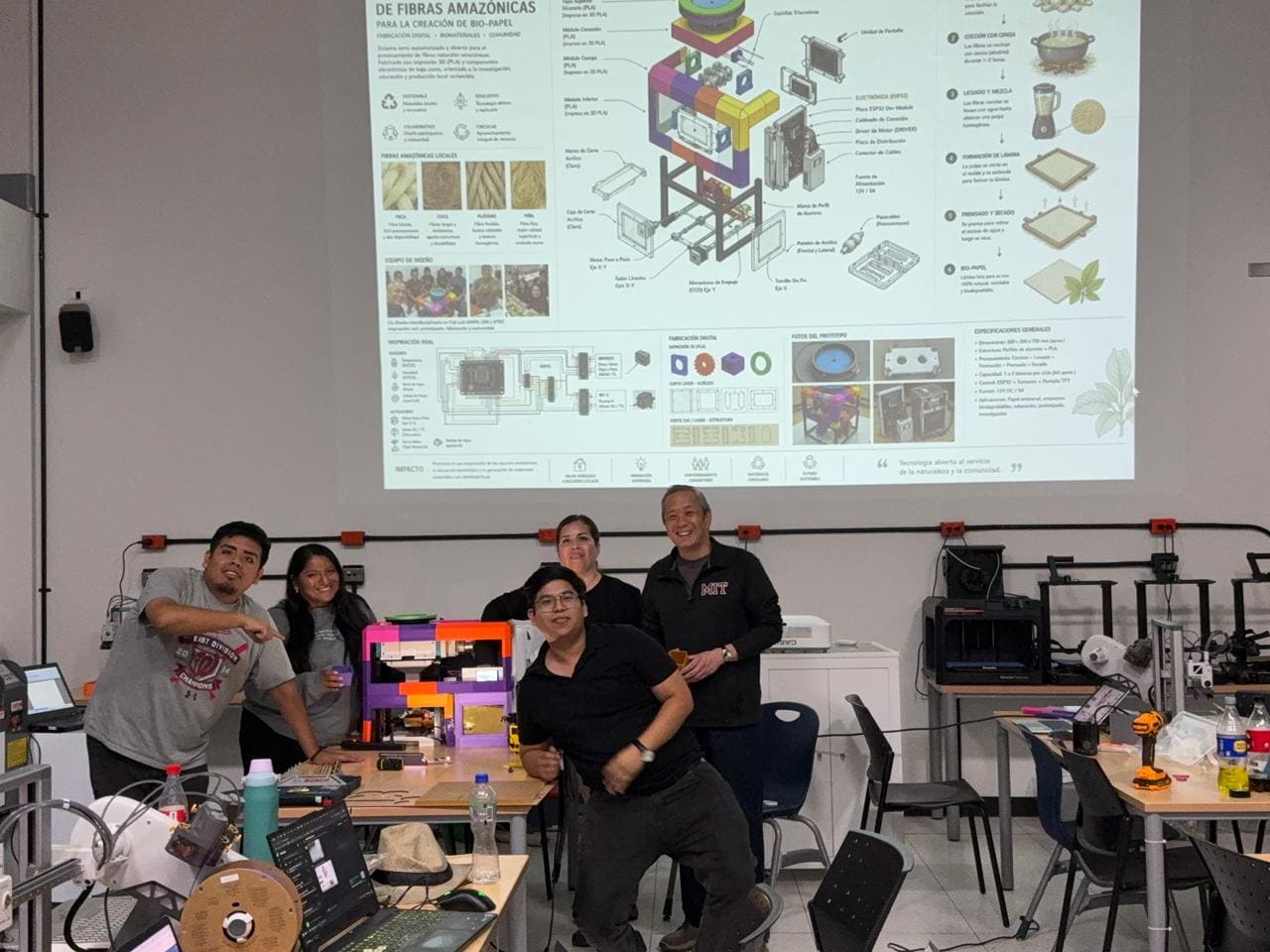
2. Group Assignment Sumary
The BIOCRUSHER project was developed collaboratively as part of the Mechanical Design and Machine Design assignments, with the objective of creating a machine capable of transforming organic fibers into sustainable biomaterials. During the early stages, the team organized brainstorming sessions to define the machine workflow, sustainability goals, and technical requirements. Ideas focused on creating a modular, affordable, and accessible machine capable of supporting local biomaterial production using natural fibers from the Peruvian Amazon.
Throughout the development process, the group collaborated on mechanical design, CAD modeling, electronic integration, automation, fabrication, and system validation. Different members contributed to the design of the shredding system, structural chassis, transmission components, PCB development, and embedded programming. Through iterative testing and collaborative problem-solving, the BIOCRUSHER evolved into a functional prototype capable of processing fibers for Bio-Paper production while integrating digital fabrication and sustainable engineering principles.
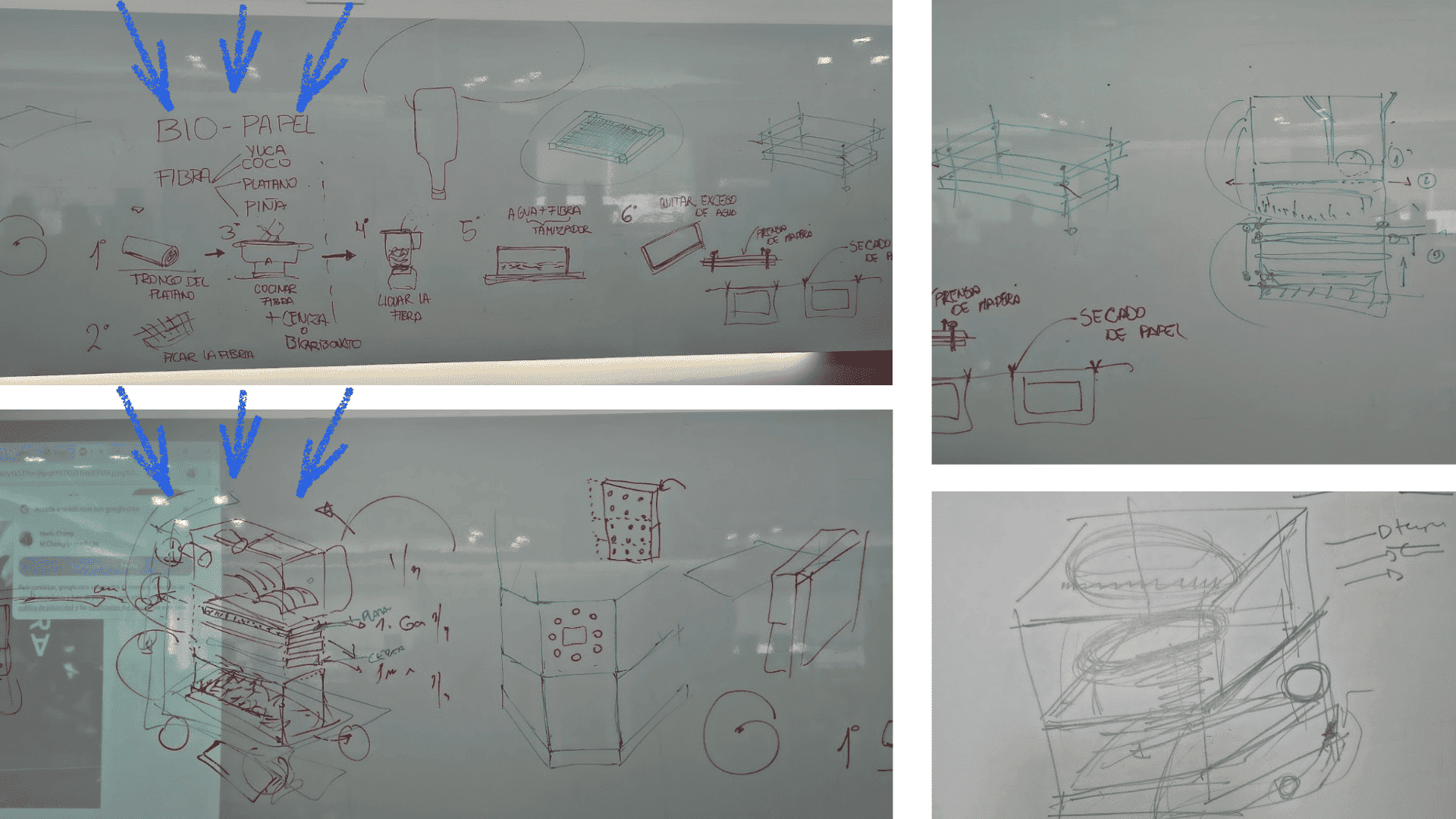
3. Brainstorming and Concept Development
The project started with a collaborative brainstorming process where the team discussed how to design a machine capable of processing natural fibers for biomaterial production. Different ideas related to sustainability, accessibility, modularity, and automation were explored to define the purpose and functionality of BIOCRUSHER. The team analyzed how local Amazonian fibers such as banana, coconut, pineapple, and yuca could be transformed into Bio-Paper through a controlled mechanical and thermal workflow.
This conceptual phase also allowed the team to define the machine workflow stages including fiber cutting, ash cooking, blending, sheet formation, and drying. Discussions focused on identifying the mechanical requirements, motor torque, blade geometry, electronic control systems, and fabrication methods necessary to achieve reliable fiber processing. These brainstorming sessions established the technical direction of the project and guided the following design stages.

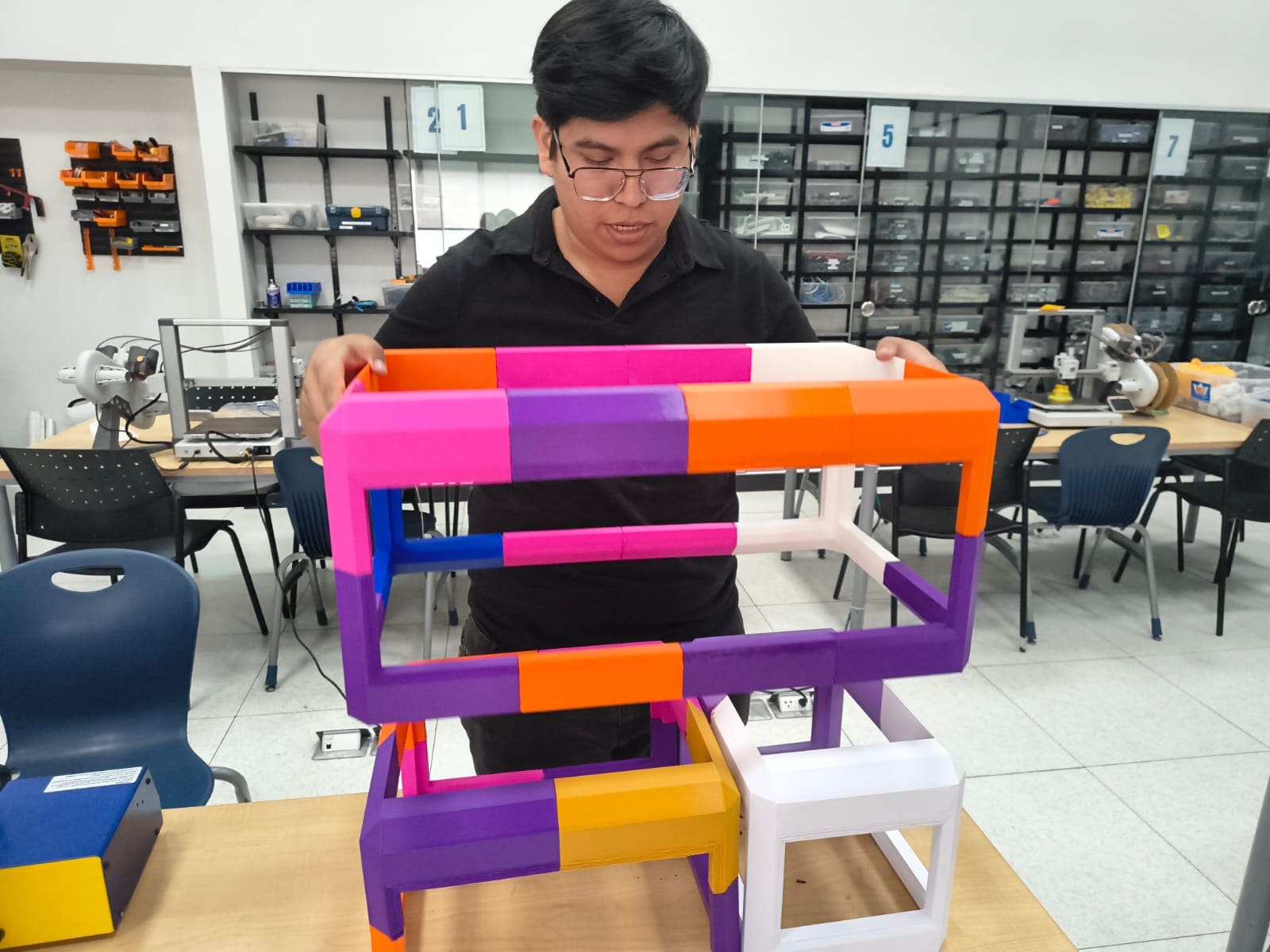
4. Mechanical Design and CAD Modeling
The mechanical design of BIOCRUSHER focused on developing a shredding system capable of efficiently processing organic fibers without blockage. Using CAD software, the team designed modular shredding blades, rotating shafts, transmission systems, structural supports, and protective enclosures. The blade geometry was optimized to improve cutting efficiency while maintaining continuous material flow during operation.
The CAD development also included the design of the main cutting chamber, linear guide systems, motor supports, pushing mechanism, acrylic enclosures, and structural frame. Exploded axonometric views were created to visualize how each mechanical and electronic component interacts within the machine. This design stage helped validate dimensions, tolerances, assembly alignment, and overall machine integration before fabrication.

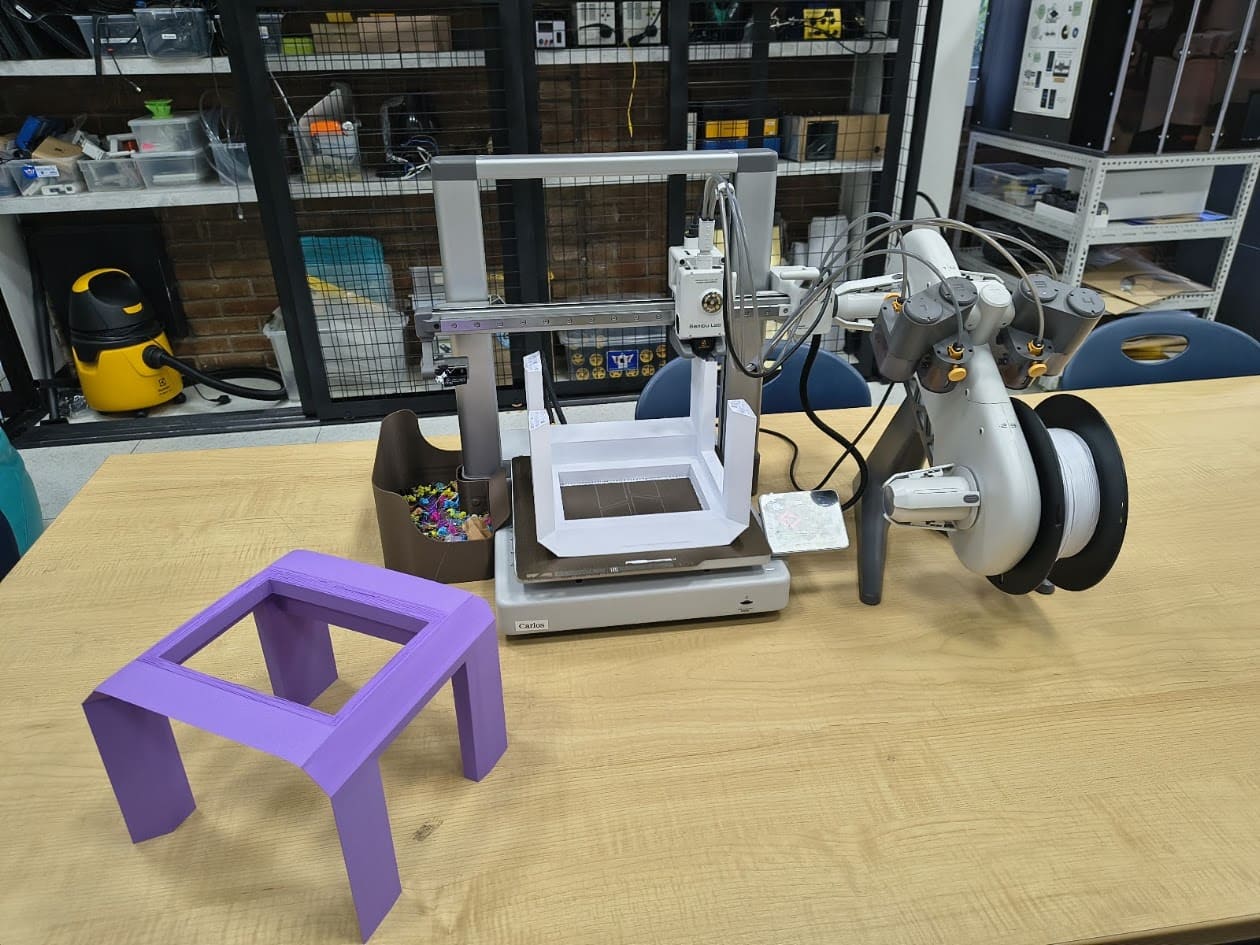
5. Digital Fabrication Process
The BIOCRUSHER project integrated multiple digital fabrication technologies including 3D printing, CNC machining, laser cutting, and PCB fabrication. Structural components, transmission systems, and custom supports were manufactured using additive manufacturing techniques with PLA and ABS materials. CNC and laser processes were also used to fabricate precision structural parts and acrylic panels for the machine enclosure.
The digital fabrication workflow allowed rapid prototyping and iterative improvements throughout the project development. CAM software was used to generate machining strategies and optimize manufacturing parameters for each fabrication process. This combination of fabrication technologies enabled the team to produce custom mechanical, structural, and electronic components efficiently while maintaining design flexibility and precision.
6. Cutting and Transmission System
The cutting system of BIOCRUSHER consists of counter-rotating blade assemblies designed to shred organic fibers into smaller pieces suitable for biomaterial processing. The shredding blades were organized into modular cutting arrays to maximize efficiency while reducing clogging during operation. Bearings, reinforced mounts, and structural supports were integrated to improve shaft stability and maintain smooth rotational movement under mechanical load.
The transmission system converts the motor’s rotational speed into the torque required for shredding dense organic materials. Custom gears, shafts, couplings, and motor integration components were designed to ensure reliable torque transfer and efficient mechanical performance. This power transmission configuration allowed the machine to process different types of fibers while maintaining operational stability and consistent shredding performance.
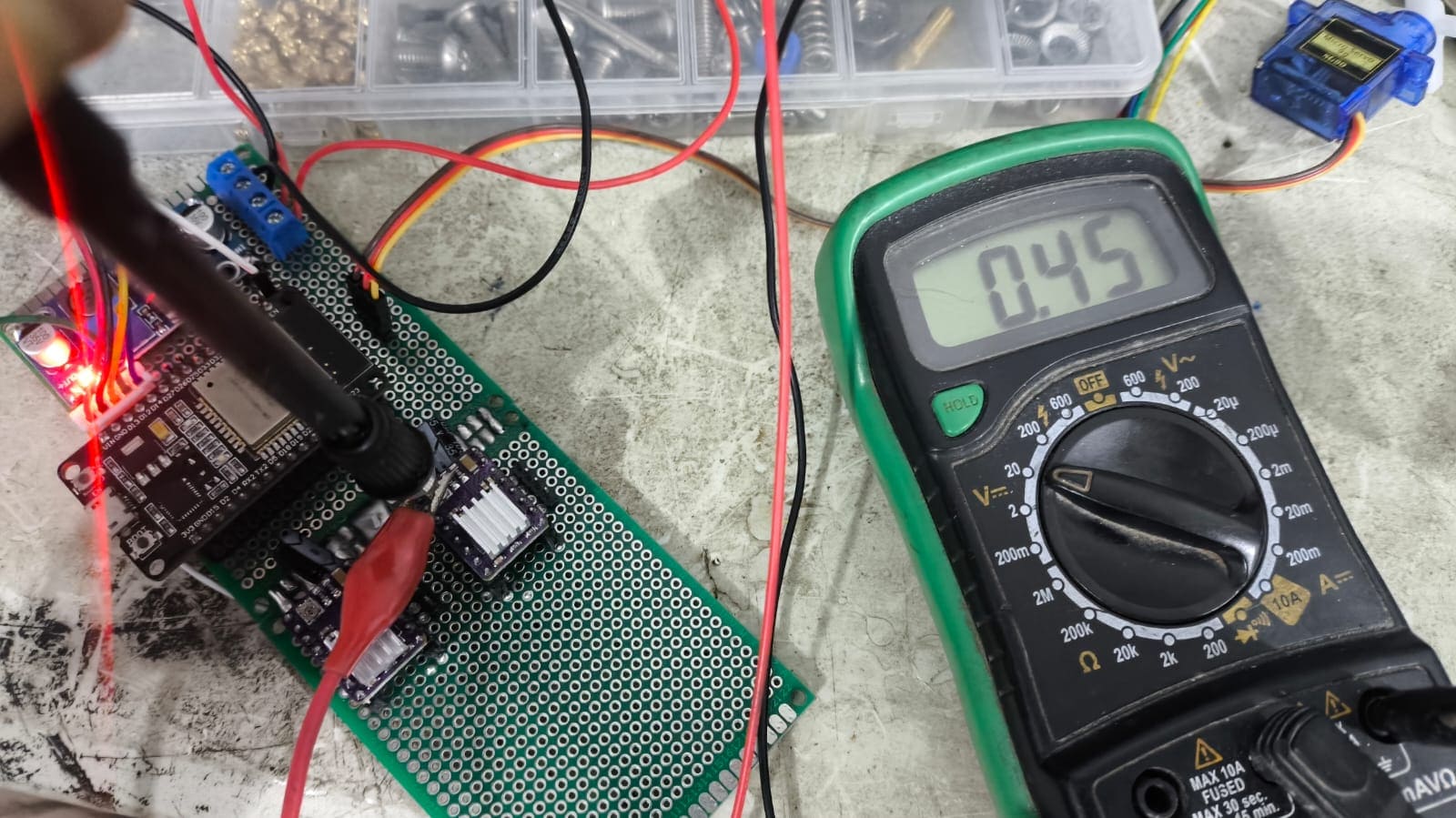
7. Electronic Integration and Control System
BIOCRUSHER integrates an ESP32-based electronic control system responsible for managing sensors, motor drivers, automation logic, and power distribution. The custom PCB connects temperature sensors, humidity sensors, LDR modules, water level sensors, and motor control systems to automate different stages of the biomaterial production process. The electronic system was designed to provide stable communication and efficient machine control during operation.
The machine also incorporates stepper motors, DC motors, motor drivers, and monitoring systems to regulate shredding behavior and process automation. Wiring organization, power regulation, and electronic protection components were integrated to improve reliability and safety. This electronic architecture transformed BIOCRUSHER into a semi-automated biomaterial processing platform capable of intelligent monitoring and control.
8. Programming and Automation
The automation system of BIOCRUSHER was programmed using Arduino IDE to control motors, sensors, and processing sequences. Embedded programming allowed the ESP32 microcontroller to coordinate shredding operations, sensor monitoring, and process regulation for the biomaterial workflow. Automation improved operational consistency by enabling controlled motor behavior and real-time monitoring during fiber processing.
The programming stage also included the implementation of variable motor control, temperature regulation, sensor feedback, and user interaction systems. Through iterative debugging and testing, the automation logic was optimized to improve machine responsiveness, operational stability, and overall efficiency. This stage demonstrated how embedded systems and programming can enhance sustainable fabrication technologies.
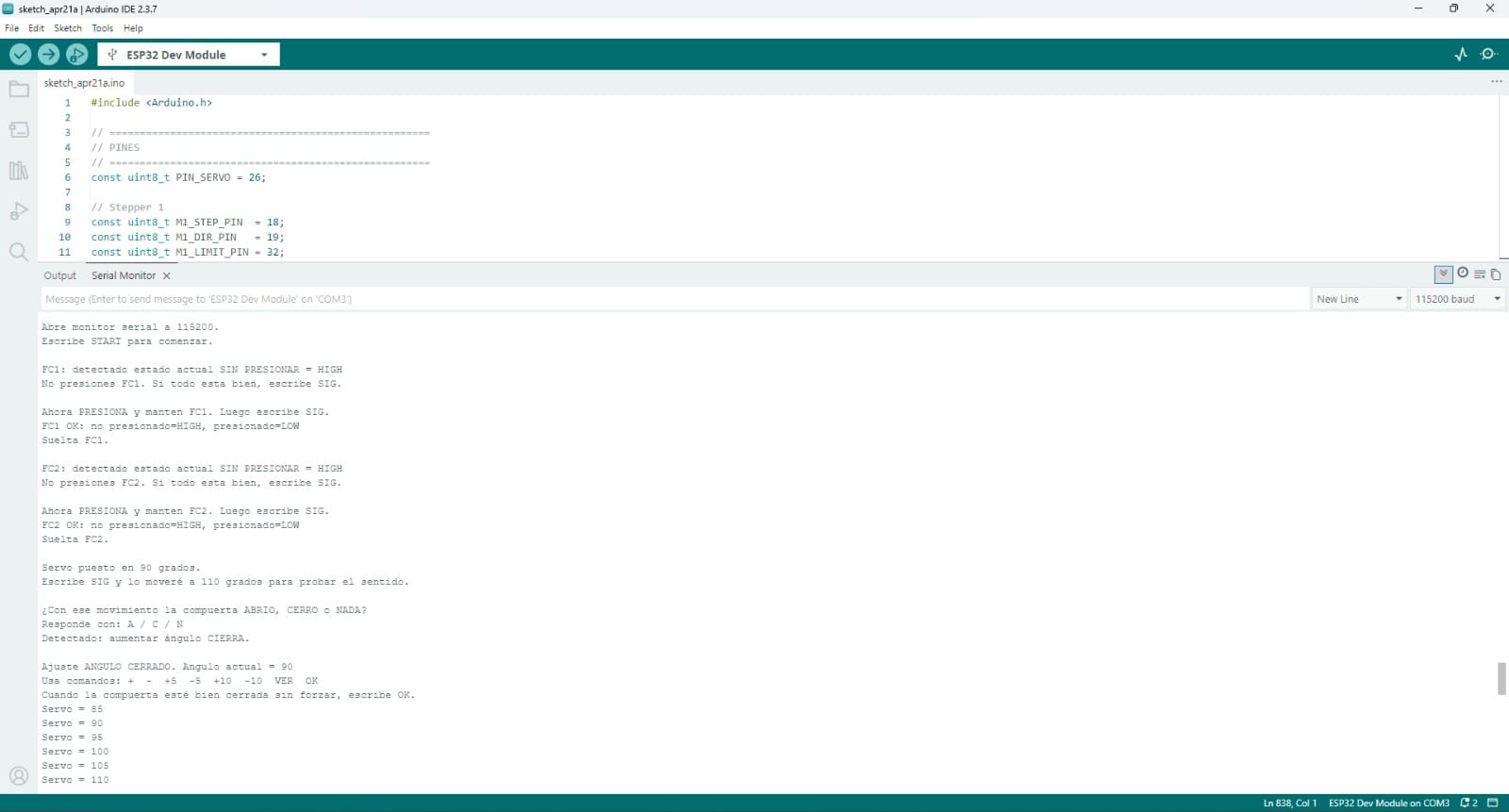
8.1 Arduino IDE Code-Programming and control logic
The control logic was programmed using Arduino IDE for the ESP32. The code manages the safety door, material selection, motor speed, iris mechanism, shredding time, container movement and status messages sent to the Nextion HMI.
#include
#include
// =====================================================
// PROTOCOLO NEXTION / ESP32
// =====================================================
// Nextion -> ESP32
// \n
// motorPct: 0..100
// dir: 0 = CRUSH, 1 = REVERSE
// irisPct: 0..100
//
// \n -> REMOVE CUP (pulso/evento)
// \n -> RETURN CUP (pulso/evento)
//
// ESP32 -> Nextion
// SOLO comandos válidos de Nextion ASCII + 0xFF 0xFF 0xFF
// Ejemplo mínimo:
// vaDoor.val=0 -> puerta cerrada
// vaDoor.val=1 -> puerta abierta
// =====================================================
// PINES
// =====================================================
// --- Motor DC con IBT-2 ---
const uint8_t PIN_RPWM = 13;
const uint8_t PIN_LPWM = 14;
// --- Sensor de puerta ---
const uint8_t PIN_PUERTA = 27;
const bool PUERTA_CERRADA_NIVEL = LOW;
// --- Servo compuerta / iris ---
const uint8_t PIN_SERVO = 26;
// --- Stepper 1 (DRV8825) ---
// Eje Z (recorrido corto, final de carrera 1)
const uint8_t M1_STEP_PIN = 18;
const uint8_t M1_DIR_PIN = 19;
const uint8_t M1_LIMIT_PIN = 32;
// --- Stepper 2 (DRV8825) ---
// Eje Y (recorrido largo, final de carrera 2)
const uint8_t M2_STEP_PIN = 21;
const uint8_t M2_DIR_PIN = 22;
const uint8_t M2_LIMIT_PIN = 33;
// --- Nextion UART ---
const uint8_t NEXTION_RX_PIN = 23; // ESP32 RX <- TX Nextion
const uint8_t NEXTION_TX_PIN = 25; // ESP32 TX -> RX Nextion
const uint32_t NEXTION_BAUD = 9600;
// UART2 para Nextion
HardwareSerial NextionSerial(2);
// =====================================================
// CALIBRACION FINAL
// =====================================================
bool SERVO_AUMENTAR_ANGULO_ABRE = false;
int SERVO_ANGULO_CERRADO = 180;
int SERVO_ANGULO_ABIERTO = 0;
const bool LIMIT1_ACTIVE_LEVEL = LOW;
const bool LIMIT2_ACTIVE_LEVEL = LOW;
int8_t M1_HOME_DIR = 1;
int8_t M2_HOME_DIR = 1;
// =====================================================
// MICROSTEPPING 1/16
// =====================================================
const long MICROSTEP_FACTOR = 16;
// Valores calibrados originalmente en paso completo
const long M1_RANGE_STEPS_FULL_BASE = 700;
const long M2_RANGE_STEPS_FULL_BASE = 3600;
const long M2_RETURN_CUP_Y_STEPS_FULL_BASE = 300;
// Escalados
long M1_RANGE_STEPS = M1_RANGE_STEPS_FULL_BASE * MICROSTEP_FACTOR; // 11200
long M2_RANGE_STEPS = M2_RANGE_STEPS_FULL_BASE * MICROSTEP_FACTOR; // 57600
long M2_RETURN_CUP_Y_STEPS = M2_RETURN_CUP_Y_STEPS_FULL_BASE * MICROSTEP_FACTOR; // 5760
// =====================================================
// CONFIG PWM MOTOR DC
// =====================================================
const uint32_t PWM_FREQ_MOTOR = 20000;
const uint8_t PWM_RES_MOTOR = 8;
const uint16_t PWM_MAX_MOTOR = (1 << PWM_RES_MOTOR) - 1;
// =====================================================
// CONFIG PWM SERVO
// =====================================================
const uint32_t PWM_FREQ_SERVO = 50;
const uint8_t PWM_RES_SERVO = 16;
const uint32_t PWM_MAX_SERVO = (1UL << PWM_RES_SERVO) - 1;
const uint32_t SERVO_PERIODO_US = 20000;
int SERVO_MIN_US = 500;
int SERVO_MAX_US = 2500;
// Servo un poco más rápido que antes, pero aún suave
unsigned long INTERVALO_SERVO_MS = 25;
int PASO_SERVO = 1;
// =====================================================
// MOTOR DC / PUERTA
// =====================================================
unsigned long TIEMPO_CAMBIO_SENTIDO_MS = 1000;
unsigned long INTERVALO_RAMPA_MS = 20;
uint8_t PASO_RAMPA = 2;
unsigned long DEBOUNCE_PUERTA_MS = 60;
unsigned long INTERVALO_REPORTE_MS = 1000;
// =====================================================
// CONFIG STEPPERS CON ACCELSTEPPER
// MÁS LENTO PARA EVITAR PÉRDIDA DE PASOS
// =====================================================
const float M1_MAX_SPEED = 400.0f * MICROSTEP_FACTOR; // 6400
const float M2_MAX_SPEED = 400.0f * MICROSTEP_FACTOR; // 6400
const float M1_ACCEL = 700.0f * MICROSTEP_FACTOR; // 11200
const float M2_ACCEL = 700.0f * MICROSTEP_FACTOR; // 11200
// Homing normal
const float M1_HOME_FAST_SPEED = 120.0f * MICROSTEP_FACTOR; // 1920
const float M2_HOME_FAST_SPEED = 120.0f * MICROSTEP_FACTOR; // 1920
const float M1_HOME_SLOW_SPEED = 40.0f * MICROSTEP_FACTOR; // 640
const float M2_HOME_SLOW_SPEED = 40.0f * MICROSTEP_FACTOR; // 640
const float M1_HOME_BACKOFF_SPEED = 80.0f * MICROSTEP_FACTOR; // 1280
const float M2_HOME_BACKOFF_SPEED = 80.0f * MICROSTEP_FACTOR; // 1280
// Homing de arranque aún más silencioso
const float STARTUP_HOME_FAST_SPEED = 90.0f * MICROSTEP_FACTOR; // 1440
const float STARTUP_HOME_SLOW_SPEED = 30.0f * MICROSTEP_FACTOR; // 480
const float STARTUP_HOME_BACKOFF_SPEED = 60.0f * MICROSTEP_FACTOR; // 960
const long HOME_SEARCH_STEPS = 200000L;
const long HOME_RELEASE_MAX_STEPS = 5000L;
// Si inviertes esto, recalibra homeDir
bool M1_INVERT_DIR = false;
bool M2_INVERT_DIR = false;
// =====================================================
// NEXTION RX BUFFER
// =====================================================
char nextionRxBuf[80];
uint8_t nextionRxIdx = 0;
// =====================================================
// SERIAL USB BUFFER
// =====================================================
char bufferRx[40];
uint8_t idxRx = 0;
// =====================================================
// SOLICITUDES Y ESTADOS APLICADOS (HMI / CONTROL)
// =====================================================
uint8_t requestedMotorPct = 0;
uint8_t requestedDir = 0; // 0=CRUSH, 1=REVERSE
uint8_t requestedIrisPct = 0;
uint8_t appliedMotorPct = 0;
uint8_t appliedDir = 0;
uint8_t appliedIrisPct = 0;
bool cupRemovePulse = false;
bool cupReturnPulse = false;
uint8_t lastIssuedMotorPct = 255;
uint8_t lastIssuedDir = 255;
uint8_t lastIssuedIrisPct = 255;
// feedback Nextion
int lastDoorFeedbackSent = -1;
unsigned long tNextionFeedback = 0;
unsigned long INTERVALO_NEXTION_FEEDBACK_MS = 250;
// =====================================================
// ESTADOS MOTOR DC
// =====================================================
enum Direccion {
DIR_STOP = 0,
DIR_D,
DIR_I
};
Direccion dirActual = DIR_STOP;
uint8_t velocidadActual = 0;
uint8_t velocidadObjetivo = 0;
Direccion dirPendiente = DIR_STOP;
uint8_t velocidadPendiente = 0;
bool inversionEnProceso = false;
bool esperandoPausaInversion = false;
Direccion dirUsuario = DIR_STOP;
uint8_t velocidadUsuario = 0;
unsigned long tRampa = 0;
unsigned long tEsperaInversion = 0;
// =====================================================
// ESTADO PUERTA
// =====================================================
bool puertaCerradaRaw = false;
bool puertaCerradaRawAnterior = false;
bool puertaCerradaEstable = false;
unsigned long tCambioPuerta = 0;
unsigned long tReporte = 0;
// =====================================================
// ESTADO SERVO
// =====================================================
int servoAnguloActual = 0;
int servoAnguloObjetivo = 0;
unsigned long tServo = 0;
// =====================================================
// STEPPERS
// =====================================================
AccelStepper stepper1(AccelStepper::DRIVER, M1_STEP_PIN, M1_DIR_PIN);
AccelStepper stepper2(AccelStepper::DRIVER, M2_STEP_PIN, M2_DIR_PIN);
enum HomePhase {
HOME_IDLE = 0,
HOME_RELEASE,
HOME_SEEK_FAST,
HOME_BACKOFF,
HOME_SEEK_SLOW
};
struct StepperAxis {
AccelStepper* stepper;
uint8_t stepPin;
uint8_t dirPin;
uint8_t limitPin;
bool limitActiveLevel;
bool invertDir;
int8_t homeDir; // +1 significa que DIR lógico positivo va hacia home
long rangeSteps; // 0..range en coordenada máquina
bool jogMode = false;
bool homed = false;
long targetMachinePos = 0;
float maxSpeed = 1000.0f;
float accel = 1000.0f;
// homing silencioso
HomePhase homePhase = HOME_IDLE;
float homeFastSpeed = 1000.0f;
float homeSlowSpeed = 300.0f;
float homeBackoffSpeed = 600.0f;
long homePhaseStartPos = 0;
};
StepperAxis axis1;
StepperAxis axis2;
// =====================================================
// SECUENCIAS AUTOMATICAS
// =====================================================
enum AutoSequenceState {
AUTOSEQ_NONE = 0,
AUTOSEQ_STARTUP_HOME_Z,
AUTOSEQ_STARTUP_HOME_Y,
AUTOSEQ_REMOVE_HOME_Z,
AUTOSEQ_REMOVE_HOME_Y,
AUTOSEQ_REMOVE_MOVE_Y_MAX,
AUTOSEQ_RETURN_HOME_Z,
AUTOSEQ_RETURN_MOVE_Y_NEAR_HOME,
AUTOSEQ_RETURN_MOVE_Z_MAX
};
AutoSequenceState autoSeqState = AUTOSEQ_STARTUP_HOME_Z;
bool autoSeqStepStarted = false;
bool startupHomingDone = false;
// =====================================================
// UTILS
// =====================================================
uint8_t minU8(uint8_t a, uint8_t b) {
return (a < b) ? a : b;
}
int clampInt(int x, int lo, int hi) {
if (x < lo) return lo;
if (x > hi) return hi;
return x;
}
long clampLong(long x, long lo, long hi) {
if (x < lo) return lo;
if (x > hi) return hi;
return x;
}
const char* textoDireccion(Direccion d) {
switch (d) {
case DIR_D: return "D";
case DIR_I: return "I";
case DIR_STOP: return "STOP";
default: return "?";
}
}
bool esSentidoValido(Direccion d) {
return (d == DIR_D || d == DIR_I);
}
void toUpperInPlace(char* s) {
for (size_t i = 0; s[i] != '\0'; i++) {
s[i] = (char)toupper((unsigned char)s[i]);
}
}
long mapLongClamped(long x, long in_min, long in_max, long out_min, long out_max) {
if (in_max == in_min) return out_min;
if (in_min < in_max) {
if (x < in_min) x = in_min;
if (x > in_max) x = in_max;
} else {
if (x > in_min) x = in_min;
if (x < in_max) x = in_max;
}
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;
}
bool autoSequenceActive() {
return autoSeqState != AUTOSEQ_NONE;
}
// =====================================================
// NEXTION HELPERS
// =====================================================
void sendNextionCommand(const String &cmd) {
NextionSerial.print(cmd);
NextionSerial.write(0xFF);
NextionSerial.write(0xFF);
NextionSerial.write(0xFF);
}
void updateHmiFeedback() {
unsigned long ahora = millis();
if (ahora - tNextionFeedback < INTERVALO_NEXTION_FEEDBACK_MS) return;
tNextionFeedback = ahora;
int doorVal = puertaCerradaEstable ? 0 : 1;
if (doorVal != lastDoorFeedbackSent) {
sendNextionCommand(String("vaDoor.val=") + String(doorVal));
lastDoorFeedbackSent = doorVal;
}
}
// =====================================================
// PARSER NEXTION
// =====================================================
void processHmiFrame(const String &msg) {
if (msg.length() < 3) return;
if (msg.startsWith("", &motorPct, &dir, &irisPct) == 3) {
motorPct = clampInt(motorPct, 0, 100);
dir = clampInt(dir, 0, 1);
irisPct = clampInt(irisPct, 0, 100);
requestedMotorPct = (uint8_t)motorPct;
requestedDir = (uint8_t)dir;
requestedIrisPct = (uint8_t)irisPct;
Serial.printf("[HMI] H motor=%u dir=%u iris=%u\n",
requestedMotorPct, requestedDir, requestedIrisPct);
} else {
Serial.printf("[HMI] Frame H invalido: %s\n", msg.c_str());
}
return;
}
if (msg.startsWith("", &evt) == 1) {
if (evt == 1) {
cupRemovePulse = true;
Serial.println("[HMI] Evento REMOVE CUP");
} else if (evt == 2) {
cupReturnPulse = true;
Serial.println("[HMI] Evento RETURN CUP");
} else {
Serial.printf("[HMI] Evento C desconocido: %d\n", evt);
}
} else {
Serial.printf("[HMI] Frame C invalido: %s\n", msg.c_str());
}
return;
}
Serial.printf("[HMI] Frame ignorado: %s\n", msg.c_str());
}
void readNextionFrames() {
while (NextionSerial.available() > 0) {
char ch = (char)NextionSerial.read();
if (ch == '\r') continue;
if (ch == '\n') {
if (nextionRxIdx > 0) {
nextionRxBuf[nextionRxIdx] = '\0';
processHmiFrame(String(nextionRxBuf));
nextionRxIdx = 0;
}
} else {
if (nextionRxIdx < sizeof(nextionRxBuf) - 1) {
nextionRxBuf[nextionRxIdx++] = ch;
} else {
nextionRxIdx = 0;
}
}
}
}
// =====================================================
// MOTOR DC
// =====================================================
uint16_t porcentajeADuty(uint8_t porcentaje) {
if (porcentaje > 100) porcentaje = 100;
return (uint16_t)((porcentaje * PWM_MAX_MOTOR) / 100);
}
void escribirPuente(Direccion dir, uint8_t velPercent) {
uint16_t duty = porcentajeADuty(velPercent);
switch (dir) {
case DIR_D:
ledcWrite(PIN_RPWM, duty);
ledcWrite(PIN_LPWM, 0);
break;
case DIR_I:
ledcWrite(PIN_RPWM, 0);
ledcWrite(PIN_LPWM, duty);
break;
case DIR_STOP:
default:
ledcWrite(PIN_RPWM, 0);
ledcWrite(PIN_LPWM, 0);
break;
}
}
void apagarMotorPorSeguridad() {
inversionEnProceso = false;
esperandoPausaInversion = false;
dirPendiente = DIR_STOP;
velocidadPendiente = 0;
dirActual = DIR_STOP;
velocidadActual = 0;
velocidadObjetivo = 0;
escribirPuente(DIR_STOP, 0);
}
void detenerMotorNormal() {
inversionEnProceso = false;
esperandoPausaInversion = false;
dirPendiente = DIR_STOP;
velocidadPendiente = 0;
velocidadObjetivo = 0;
}
void iniciarInversion(Direccion nuevaDir, uint8_t nuevaVel) {
dirPendiente = nuevaDir;
velocidadPendiente = nuevaVel;
inversionEnProceso = true;
esperandoPausaInversion = false;
velocidadObjetivo = 0;
Serial.printf("Inversion solicitada. Frenando a 0 y esperando %lu ms.\n",
TIEMPO_CAMBIO_SENTIDO_MS);
}
void procesarSolicitudMotor(Direccion nuevaDir, uint8_t nuevaVel) {
if (nuevaVel > 100) {
Serial.println("Error: velocidad fuera de rango (0-100)");
return;
}
if (nuevaVel == 0) {
dirUsuario = DIR_STOP;
velocidadUsuario = 0;
} else {
dirUsuario = nuevaDir;
velocidadUsuario = nuevaVel;
}
if (!puertaCerradaEstable) {
apagarMotorPorSeguridad();
if (nuevaVel == 0) {
Serial.println("Puerta abierta. Motor detenido y configuracion en STOP.");
} else {
Serial.printf("Puerta abierta. Configuracion guardada para reanudar luego: %s%u\n",
textoDireccion(dirUsuario), velocidadUsuario);
}
return;
}
if (nuevaVel == 0) {
Serial.println("Parada solicitada.");
detenerMotorNormal();
return;
}
if (dirActual == DIR_STOP && velocidadActual == 0 && !inversionEnProceso) {
dirActual = nuevaDir;
velocidadObjetivo = nuevaVel;
Serial.printf("Arranque: %s%u\n", textoDireccion(nuevaDir), nuevaVel);
return;
}
if (!inversionEnProceso && dirActual == nuevaDir) {
velocidadObjetivo = nuevaVel;
Serial.printf("Nueva velocidad: %s%u\n", textoDireccion(nuevaDir), nuevaVel);
return;
}
if (!inversionEnProceso && esSentidoValido(dirActual) && nuevaDir != dirActual) {
iniciarInversion(nuevaDir, nuevaVel);
return;
}
if (inversionEnProceso) {
dirPendiente = nuevaDir;
velocidadPendiente = nuevaVel;
Serial.printf("Destino pendiente actualizado: %s%u\n",
textoDireccion(nuevaDir), nuevaVel);
}
}
void actualizarRampaMotor() {
if (!puertaCerradaEstable) return;
unsigned long ahora = millis();
if (ahora - tRampa < INTERVALO_RAMPA_MS) return;
tRampa = ahora;
if (inversionEnProceso && !esperandoPausaInversion) {
if (velocidadActual > velocidadObjetivo) {
uint8_t diferencia = (uint8_t)(velocidadActual - velocidadObjetivo);
uint8_t delta = minU8(PASO_RAMPA, diferencia);
velocidadActual -= delta;
escribirPuente(dirActual, velocidadActual);
}
if (velocidadActual == 0) {
escribirPuente(DIR_STOP, 0);
dirActual = DIR_STOP;
esperandoPausaInversion = true;
tEsperaInversion = millis();
Serial.println("Motor en 0. Iniciando pausa de inversion...");
}
return;
}
if (inversionEnProceso && esperandoPausaInversion) {
if (millis() - tEsperaInversion >= TIEMPO_CAMBIO_SENTIDO_MS) {
dirActual = dirPendiente;
velocidadObjetivo = velocidadPendiente;
inversionEnProceso = false;
esperandoPausaInversion = false;
Serial.printf("Inversion completada. Nuevo objetivo: %s%u\n",
textoDireccion(dirActual), velocidadObjetivo);
}
return;
}
if (velocidadActual < velocidadObjetivo) {
uint8_t faltante = (uint8_t)(velocidadObjetivo - velocidadActual);
uint8_t delta = minU8(PASO_RAMPA, faltante);
velocidadActual += delta;
escribirPuente(dirActual, velocidadActual);
}
else if (velocidadActual > velocidadObjetivo) {
uint8_t diferencia = (uint8_t)(velocidadActual - velocidadObjetivo);
uint8_t delta = minU8(PASO_RAMPA, diferencia);
velocidadActual -= delta;
if (velocidadActual == 0 && velocidadObjetivo == 0) {
escribirPuente(DIR_STOP, 0);
dirActual = DIR_STOP;
} else {
escribirPuente(dirActual, velocidadActual);
}
}
appliedMotorPct = velocidadActual;
appliedDir = (dirActual == DIR_I) ? 1 : 0;
}
// =====================================================
// SERVO / IRIS
// =====================================================
uint32_t servoPulseUsToDuty(uint32_t pulseUs) {
return (pulseUs * PWM_MAX_SERVO) / SERVO_PERIODO_US;
}
void escribirServoAngulo(int angulo) {
angulo = clampInt(angulo, 0, 180);
long pulseUs = mapLongClamped(angulo, 0, 180, SERVO_MIN_US, SERVO_MAX_US);
uint32_t duty = servoPulseUsToDuty((uint32_t)pulseUs);
ledcWrite(PIN_SERVO, duty);
}
void moverServoA(int angulo) {
servoAnguloObjetivo = clampInt(angulo, 0, 180);
Serial.printf("Servo objetivo -> %d grados\n", servoAnguloObjetivo);
}
int irisPctToServoAngle(uint8_t pct) {
return (int)mapLongClamped((long)pct, 0, 100, SERVO_ANGULO_CERRADO, SERVO_ANGULO_ABIERTO);
}
uint8_t servoAngleToIrisPct(int angle) {
return (uint8_t)clampLong(
mapLongClamped((long)angle, SERVO_ANGULO_CERRADO, SERVO_ANGULO_ABIERTO, 0, 100),
0, 100
);
}
void abrirCompuerta() {
requestedIrisPct = 100;
moverServoA(SERVO_ANGULO_ABIERTO);
Serial.printf("Compuerta ABRIR -> %d grados\n", SERVO_ANGULO_ABIERTO);
}
void cerrarCompuerta() {
requestedIrisPct = 0;
moverServoA(SERVO_ANGULO_CERRADO);
Serial.printf("Compuerta CERRAR -> %d grados\n", SERVO_ANGULO_CERRADO);
}
void actualizarServo() {
unsigned long ahora = millis();
if (ahora - tServo < INTERVALO_SERVO_MS) return;
tServo = ahora;
if (servoAnguloActual < servoAnguloObjetivo) {
servoAnguloActual += PASO_SERVO;
if (servoAnguloActual > servoAnguloObjetivo) servoAnguloActual = servoAnguloObjetivo;
escribirServoAngulo(servoAnguloActual);
}
else if (servoAnguloActual > servoAnguloObjetivo) {
servoAnguloActual -= PASO_SERVO;
if (servoAnguloActual < servoAnguloObjetivo) servoAnguloActual = servoAnguloObjetivo;
escribirServoAngulo(servoAnguloActual);
}
appliedIrisPct = servoAngleToIrisPct(servoAnguloActual);
}
// =====================================================
// PUERTA
// =====================================================
bool leerPuertaCrudaCerrada() {
return (digitalRead(PIN_PUERTA) == PUERTA_CERRADA_NIVEL);
}
void reanudarUltimaConfiguracion() {
if (!puertaCerradaEstable) return;
if (!esSentidoValido(dirUsuario) || velocidadUsuario == 0) {
Serial.println("Puerta cerrada. No hay configuracion previa para reanudar.");
return;
}
dirActual = dirUsuario;
velocidadObjetivo = velocidadUsuario;
Serial.printf("Puerta cerrada. Reanudando ultima configuracion: %s%u\n",
textoDireccion(dirUsuario), velocidadUsuario);
}
void manejarEventoPuertaAbierta() {
Serial.println("EVENTO: PUERTA ABIERTA -> APAGADO FORZADO");
apagarMotorPorSeguridad();
}
void manejarEventoPuertaCerrada() {
Serial.println("EVENTO: PUERTA CERRADA");
reanudarUltimaConfiguracion();
}
void actualizarPuerta() {
bool lecturaActual = leerPuertaCrudaCerrada();
if (lecturaActual != puertaCerradaRawAnterior) {
puertaCerradaRawAnterior = lecturaActual;
tCambioPuerta = millis();
}
if (millis() - tCambioPuerta >= DEBOUNCE_PUERTA_MS) {
puertaCerradaRaw = lecturaActual;
if (puertaCerradaEstable != puertaCerradaRaw) {
puertaCerradaEstable = puertaCerradaRaw;
if (puertaCerradaEstable) {
manejarEventoPuertaCerrada();
} else {
manejarEventoPuertaAbierta();
}
}
}
}
// =====================================================
// APLICACION DE SOLICITUDES HMI
// =====================================================
void applyCrusherMotor() {
Direccion reqDir = (requestedDir == 0) ? DIR_D : DIR_I;
procesarSolicitudMotor(reqDir, requestedMotorPct);
}
void applyIris() {
int targetAngle = irisPctToServoAngle(requestedIrisPct);
moverServoA(targetAngle);
}
void applyRequestedStateIfChanged() {
if (requestedMotorPct != lastIssuedMotorPct || requestedDir != lastIssuedDir) {
applyCrusherMotor();
lastIssuedMotorPct = requestedMotorPct;
lastIssuedDir = requestedDir;
}
if (requestedIrisPct != lastIssuedIrisPct) {
applyIris();
lastIssuedIrisPct = requestedIrisPct;
}
}
// =====================================================
// STEPPERS CON ACCELSTEPPER
// =====================================================
bool axisLimitActive(StepperAxis &ax) {
return digitalRead(ax.limitPin) == ax.limitActiveLevel;
}
// Convierte posición máquina (0=home, positivo alejándose)
// a posición lógica de AccelStepper.
long axisLogicalFromMachine(const StepperAxis &ax, long machinePos) {
return (ax.homeDir == 1) ? -machinePos : machinePos;
}
// Convierte posición lógica de AccelStepper a posición máquina.
long axisMachineFromLogical(const StepperAxis &ax, long logicalPos) {
return (ax.homeDir == 1) ? -logicalPos : logicalPos;
}
long axisMachinePosition(const StepperAxis &ax) {
return axisMachineFromLogical(ax, ax.stepper->currentPosition());
}
bool axisIsBusy(const StepperAxis &ax) {
return (ax.homePhase != HOME_IDLE) || ax.jogMode || (ax.stepper->distanceToGo() != 0);
}
float axisLogicalSpeedTowardHome(const StepperAxis &ax, float speedAbs) {
return (ax.homeDir == 1) ? +fabs(speedAbs) : -fabs(speedAbs);
}
float axisLogicalSpeedAwayFromHome(const StepperAxis &ax, float speedAbs) {
return -axisLogicalSpeedTowardHome(ax, speedAbs);
}
void axisConfigureMove(StepperAxis &ax, float maxSpeed, float accel) {
ax.stepper->setMaxSpeed(maxSpeed);
ax.stepper->setAcceleration(accel);
}
void axisStopImmediate(StepperAxis &ax) {
long pos = ax.stepper->currentPosition();
ax.stepper->moveTo(pos);
ax.homePhase = HOME_IDLE;
ax.jogMode = false;
ax.targetMachinePos = axisMachinePosition(ax);
}
void axisSetAtHome(StepperAxis &ax) {
ax.stepper->setCurrentPosition(0);
ax.stepper->moveTo(0);
ax.homePhase = HOME_IDLE;
ax.jogMode = false;
ax.homed = true;
ax.targetMachinePos = 0;
}
void axisStartQuietHome(StepperAxis &ax, const char* nombre,
float fastSpeed, float slowSpeed, float backoffSpeed) {
ax.homeFastSpeed = fastSpeed;
ax.homeSlowSpeed = slowSpeed;
ax.homeBackoffSpeed = backoffSpeed;
ax.jogMode = false;
ax.homed = false;
// durante homing usamos runSpeed(), no movimiento acelerado
ax.stepper->moveTo(ax.stepper->currentPosition());
if (axisLimitActive(ax)) {
ax.homePhase = HOME_RELEASE;
ax.stepper->setSpeed(axisLogicalSpeedAwayFromHome(ax, ax.homeBackoffSpeed));
ax.homePhaseStartPos = ax.stepper->currentPosition();
Serial.printf("%s -> HOME silencioso: liberando switch...\n", nombre);
} else {
ax.homePhase = HOME_SEEK_FAST;
ax.stepper->setSpeed(axisLogicalSpeedTowardHome(ax, ax.homeFastSpeed));
ax.homePhaseStartPos = ax.stepper->currentPosition();
Serial.printf("%s -> HOME silencioso: búsqueda rápida...\n", nombre);
}
}
void axisStartHome(StepperAxis &ax, const char* nombre) {
axisStartQuietHome(ax, nombre, ax.homeFastSpeed, ax.homeSlowSpeed, ax.homeBackoffSpeed);
}
void axisStartAbsolute(StepperAxis &ax, const char* nombre, long machineTarget) {
if (!ax.homed) {
Serial.printf("%s -> primero haz HOME\n", nombre);
return;
}
machineTarget = clampLong(machineTarget, 0, ax.rangeSteps);
long logicalTarget = axisLogicalFromMachine(ax, machineTarget);
axisConfigureMove(ax, ax.maxSpeed, ax.accel);
ax.stepper->moveTo(logicalTarget);
ax.targetMachinePos = machineTarget;
ax.homePhase = HOME_IDLE;
ax.jogMode = false;
Serial.printf("%s -> movimiento absoluto a %ld\n", nombre, machineTarget);
}
void axisStartRelative(StepperAxis &ax, const char* nombre, long delta) {
if (!ax.homed) {
Serial.printf("%s -> primero haz HOME\n", nombre);
return;
}
long currentMachine = axisMachinePosition(ax);
long targetMachine = clampLong(currentMachine + delta, 0, ax.rangeSteps);
if (targetMachine == currentMachine) {
Serial.printf("%s -> ya esta en el limite permitido\n", nombre);
return;
}
axisStartAbsolute(ax, nombre, targetMachine);
}
void axisStartJog(StepperAxis &ax, const char* nombre, int8_t coordDir) {
if (!ax.homed) {
Serial.printf("%s -> primero haz HOME\n", nombre);
return;
}
axisConfigureMove(ax, ax.maxSpeed, ax.accel);
long farTarget = (coordDir > 0) ? ax.rangeSteps : 0;
long logicalTarget = axisLogicalFromMachine(ax, farTarget);
ax.stepper->moveTo(logicalTarget);
ax.targetMachinePos = farTarget;
ax.homePhase = HOME_IDLE;
ax.jogMode = true;
Serial.printf("%s -> JOG %s\n", nombre, (coordDir > 0 ? "+" : "-"));
}
void axisUpdateHomeQuiet(StepperAxis &ax, const char* nombre) {
switch (ax.homePhase) {
case HOME_IDLE:
return;
case HOME_RELEASE:
ax.stepper->runSpeed();
if (!axisLimitActive(ax)) {
ax.homePhase = HOME_SEEK_FAST;
ax.stepper->setSpeed(axisLogicalSpeedTowardHome(ax, ax.homeFastSpeed));
ax.homePhaseStartPos = ax.stepper->currentPosition();
Serial.printf("%s -> switch liberado, búsqueda rápida.\n", nombre);
} else {
long delta = labs(ax.stepper->currentPosition() - ax.homePhaseStartPos);
if (delta > HOME_RELEASE_MAX_STEPS) {
ax.homePhase = HOME_IDLE;
Serial.printf("%s -> ERROR liberando switch.\n", nombre);
}
}
return;
case HOME_SEEK_FAST:
ax.stepper->runSpeed();
if (axisLimitActive(ax)) {
ax.homePhase = HOME_BACKOFF;
ax.stepper->setSpeed(axisLogicalSpeedAwayFromHome(ax, ax.homeBackoffSpeed));
ax.homePhaseStartPos = ax.stepper->currentPosition();
Serial.printf("%s -> switch tocado, retroceso.\n", nombre);
} else {
long delta = labs(ax.stepper->currentPosition() - ax.homePhaseStartPos);
if (delta > HOME_SEARCH_STEPS) {
ax.homePhase = HOME_IDLE;
Serial.printf("%s -> ERROR no encontró home.\n", nombre);
}
}
return;
case HOME_BACKOFF:
ax.stepper->runSpeed();
if (!axisLimitActive(ax)) {
ax.homePhase = HOME_SEEK_SLOW;
ax.stepper->setSpeed(axisLogicalSpeedTowardHome(ax, ax.homeSlowSpeed));
ax.homePhaseStartPos = ax.stepper->currentPosition();
Serial.printf("%s -> búsqueda lenta final.\n", nombre);
} else {
long delta = labs(ax.stepper->currentPosition() - ax.homePhaseStartPos);
if (delta > HOME_RELEASE_MAX_STEPS) {
ax.homePhase = HOME_IDLE;
Serial.printf("%s -> ERROR en backoff.\n", nombre);
}
}
return;
case HOME_SEEK_SLOW:
ax.stepper->runSpeed();
if (axisLimitActive(ax)) {
axisSetAtHome(ax);
Serial.printf("%s -> HOME completo, posición = 0\n", nombre);
} else {
long delta = labs(ax.stepper->currentPosition() - ax.homePhaseStartPos);
if (delta > HOME_RELEASE_MAX_STEPS) {
ax.homePhase = HOME_IDLE;
Serial.printf("%s -> ERROR en búsqueda lenta.\n", nombre);
}
}
return;
}
}
void axisUpdate(StepperAxis &ax, const char* nombre) {
if (ax.homePhase != HOME_IDLE) {
axisUpdateHomeQuiet(ax, nombre);
return;
}
long currentMachine = axisMachinePosition(ax);
if (currentMachine < 0) {
ax.stepper->setCurrentPosition(axisLogicalFromMachine(ax, 0));
ax.stepper->moveTo(axisLogicalFromMachine(ax, 0));
currentMachine = 0;
}
if (currentMachine > ax.rangeSteps) {
ax.stepper->setCurrentPosition(axisLogicalFromMachine(ax, ax.rangeSteps));
ax.stepper->moveTo(axisLogicalFromMachine(ax, ax.rangeSteps));
currentMachine = ax.rangeSteps;
}
ax.stepper->run();
if (ax.jogMode) {
long p = axisMachinePosition(ax);
if (p <= 0 && ax.targetMachinePos == 0) {
ax.stepper->setCurrentPosition(axisLogicalFromMachine(ax, 0));
ax.stepper->moveTo(axisLogicalFromMachine(ax, 0));
ax.jogMode = false;
Serial.printf("%s -> jog detenido en home\n", nombre);
return;
}
if (p >= ax.rangeSteps && ax.targetMachinePos == ax.rangeSteps) {
ax.stepper->setCurrentPosition(axisLogicalFromMachine(ax, ax.rangeSteps));
ax.stepper->moveTo(axisLogicalFromMachine(ax, ax.rangeSteps));
ax.jogMode = false;
Serial.printf("%s -> jog detenido en maximo\n", nombre);
return;
}
}
}
// =====================================================
// SECUENCIAS AUTOMATICAS
// =====================================================
void startRemoveCupSequence() {
if (autoSequenceActive()) return;
autoSeqState = AUTOSEQ_REMOVE_HOME_Z;
autoSeqStepStarted = false;
Serial.println("[AUTO] Iniciando REMOVE CUP");
}
void startReturnCupSequence() {
if (autoSequenceActive()) return;
autoSeqState = AUTOSEQ_RETURN_HOME_Z;
autoSeqStepStarted = false;
Serial.println("[AUTO] Iniciando RETURN CUP");
}
void updateAutoSequence() {
switch (autoSeqState) {
case AUTOSEQ_NONE:
break;
case AUTOSEQ_STARTUP_HOME_Z:
if (!autoSeqStepStarted) {
Serial.println("[AUTO] Startup: seteo suave eje Z");
axisStartQuietHome(axis1, "Z/M1",
STARTUP_HOME_FAST_SPEED,
STARTUP_HOME_SLOW_SPEED,
STARTUP_HOME_BACKOFF_SPEED);
autoSeqStepStarted = true;
}
if (!axisIsBusy(axis1)) {
if (!axis1.homed) {
Serial.println("[AUTO] ERROR: home startup Z falló.");
autoSeqState = AUTOSEQ_NONE;
} else {
autoSeqState = AUTOSEQ_STARTUP_HOME_Y;
autoSeqStepStarted = false;
}
}
break;
case AUTOSEQ_STARTUP_HOME_Y:
if (!autoSeqStepStarted) {
Serial.println("[AUTO] Startup: seteo suave eje Y");
axisStartQuietHome(axis2, "Y/M2",
STARTUP_HOME_FAST_SPEED,
STARTUP_HOME_SLOW_SPEED,
STARTUP_HOME_BACKOFF_SPEED);
autoSeqStepStarted = true;
}
if (!axisIsBusy(axis2)) {
if (!axis2.homed) {
Serial.println("[AUTO] ERROR: home startup Y falló.");
autoSeqState = AUTOSEQ_NONE;
} else {
startupHomingDone = true;
autoSeqState = AUTOSEQ_NONE;
autoSeqStepStarted = false;
Serial.println("[AUTO] Startup completo. Ambos ejes en origen.");
}
}
break;
case AUTOSEQ_REMOVE_HOME_Z:
if (!autoSeqStepStarted) {
axisStartHome(axis1, "Z/M1");
autoSeqStepStarted = true;
}
if (!axisIsBusy(axis1)) {
if (!axis1.homed) {
Serial.println("[AUTO] ERROR: home Z en REMOVE CUP falló.");
autoSeqState = AUTOSEQ_NONE;
} else {
autoSeqState = AUTOSEQ_REMOVE_HOME_Y;
autoSeqStepStarted = false;
}
}
break;
case AUTOSEQ_REMOVE_HOME_Y:
if (!autoSeqStepStarted) {
axisStartHome(axis2, "Y/M2");
autoSeqStepStarted = true;
}
if (!axisIsBusy(axis2)) {
if (!axis2.homed) {
Serial.println("[AUTO] ERROR: home Y en REMOVE CUP falló.");
autoSeqState = AUTOSEQ_NONE;
} else {
autoSeqState = AUTOSEQ_REMOVE_MOVE_Y_MAX;
autoSeqStepStarted = false;
}
}
break;
case AUTOSEQ_REMOVE_MOVE_Y_MAX:
if (!autoSeqStepStarted) {
axisStartAbsolute(axis2, "Y/M2", axis2.rangeSteps);
autoSeqStepStarted = true;
}
if (!axisIsBusy(axis2)) {
autoSeqState = AUTOSEQ_NONE;
autoSeqStepStarted = false;
Serial.println("[AUTO] REMOVE CUP completado.");
}
break;
case AUTOSEQ_RETURN_HOME_Z:
if (!autoSeqStepStarted) {
axisStartHome(axis1, "Z/M1");
autoSeqStepStarted = true;
}
if (!axisIsBusy(axis1)) {
if (!axis1.homed) {
Serial.println("[AUTO] ERROR: home Z en RETURN CUP falló.");
autoSeqState = AUTOSEQ_NONE;
} else {
autoSeqState = AUTOSEQ_RETURN_MOVE_Y_NEAR_HOME;
autoSeqStepStarted = false;
}
}
break;
case AUTOSEQ_RETURN_MOVE_Y_NEAR_HOME:
if (!autoSeqStepStarted) {
axisStartAbsolute(axis2, "Y/M2", M2_RETURN_CUP_Y_STEPS);
autoSeqStepStarted = true;
}
if (!axisIsBusy(axis2)) {
autoSeqState = AUTOSEQ_RETURN_MOVE_Z_MAX;
autoSeqStepStarted = false;
}
break;
case AUTOSEQ_RETURN_MOVE_Z_MAX:
if (!autoSeqStepStarted) {
// aquí Z se aleja del final y sube al máximo
axisStartAbsolute(axis1, "Z/M1", axis1.rangeSteps);
autoSeqStepStarted = true;
}
if (!axisIsBusy(axis1)) {
autoSeqState = AUTOSEQ_NONE;
autoSeqStepStarted = false;
Serial.println("[AUTO] RETURN CUP completado.");
}
break;
}
}
// =====================================================
// CUP EVENTS
// =====================================================
void handleCupRemove() {
if (!cupRemovePulse) return;
if (!startupHomingDone) return;
if (autoSequenceActive()) return;
cupRemovePulse = false;
startRemoveCupSequence();
}
void handleCupReturn() {
if (!cupReturnPulse) return;
if (!startupHomingDone) return;
if (autoSequenceActive()) return;
cupReturnPulse = false;
startReturnCupSequence();
}
// =====================================================
// REPORTE GENERAL
// =====================================================
void reportarEstadoSistema() {
if (millis() - tReporte < INTERVALO_REPORTE_MS) return;
tReporte = millis();
long pos1 = axisMachinePosition(axis1);
long pos2 = axisMachinePosition(axis2);
Serial.printf(
"PUERTA:%s | REQ_MOTOR:%u/%u | APP_MOTOR:%u/%u | REQ_IRIS:%u | APP_IRIS:%u | SERVO:%d/%d | "
"FC1:%s POS1:%ld/%ld HOMED1:%d BUSY1:%d | "
"FC2:%s POS2:%ld/%ld HOMED2:%d BUSY2:%d | AUTOSEQ:%d\n",
puertaCerradaEstable ? "CERRADA" : "ABIERTA",
requestedMotorPct, requestedDir,
appliedMotorPct, appliedDir,
requestedIrisPct, appliedIrisPct,
servoAnguloActual, servoAnguloObjetivo,
axisLimitActive(axis1) ? "ACT" : "LIB",
pos1, axis1.rangeSteps, axis1.homed ? 1 : 0, axisIsBusy(axis1) ? 1 : 0,
axisLimitActive(axis2) ? "ACT" : "LIB",
pos2, axis2.rangeSteps, axis2.homed ? 1 : 0, axisIsBusy(axis2) ? 1 : 0,
(int)autoSeqState
);
}
// =====================================================
// COMANDOS SERIAL DEBUG
// =====================================================
void imprimirAyuda() {
Serial.println("===== COMANDOS =====");
Serial.println("Motor DC:");
Serial.println(" D100");
Serial.println(" I50");
Serial.println(" D0");
Serial.println("");
Serial.println("Servo:");
Serial.println(" ABRIR");
Serial.println(" CERRAR");
Serial.println(" ANG90");
Serial.println(" IRIS60");
Serial.println("");
Serial.println("Steppers:");
Serial.println(" HOME1");
Serial.println(" HOME2");
Serial.println(" P1+1000");
Serial.println(" P1-500");
Serial.println(" P2+1000");
Serial.println(" P2-500");
Serial.println(" J1+ / J1-");
Serial.println(" J2+ / J2-");
Serial.println(" STOP1");
Serial.println(" STOP2");
Serial.println("");
Serial.println("Secuencias:");
Serial.println(" REMOVECUP");
Serial.println(" RETURNCUP");
Serial.println("");
Serial.println("General:");
Serial.println(" ESTADO");
Serial.println(" AYUDA");
}
void imprimirEstadoUnaVez() {
long pos1 = axisMachinePosition(axis1);
long pos2 = axisMachinePosition(axis2);
Serial.printf(
"PUERTA:%s | REQ_MOTOR:%u/%u | APP_MOTOR:%u/%u | REQ_IRIS:%u | APP_IRIS:%u | SERVO:%d/%d | "
"FC1:%s POS1:%ld/%ld HOMED1:%d BUSY1:%d | "
"FC2:%s POS2:%ld/%ld HOMED2:%d BUSY2:%d | AUTOSEQ:%d\n",
puertaCerradaEstable ? "CERRADA" : "ABIERTA",
requestedMotorPct, requestedDir,
appliedMotorPct, appliedDir,
requestedIrisPct, appliedIrisPct,
servoAnguloActual, servoAnguloObjetivo,
axisLimitActive(axis1) ? "ACT" : "LIB",
pos1, axis1.rangeSteps, axis1.homed ? 1 : 0, axisIsBusy(axis1) ? 1 : 0,
axisLimitActive(axis2) ? "ACT" : "LIB",
pos2, axis2.rangeSteps, axis2.homed ? 1 : 0, axisIsBusy(axis2) ? 1 : 0,
(int)autoSeqState
);
}
void procesarComando(const char* cmdOriginal) {
if (cmdOriginal == nullptr || cmdOriginal[0] == '\0') return;
char cmd[40];
strncpy(cmd, cmdOriginal, sizeof(cmd) - 1);
cmd[sizeof(cmd) - 1] = '\0';
toUpperInPlace(cmd);
if (strcmp(cmd, "ABRIR") == 0) {
abrirCompuerta();
return;
}
if (strcmp(cmd, "CERRAR") == 0) {
cerrarCompuerta();
return;
}
if (strcmp(cmd, "REMOVECUP") == 0) {
cupRemovePulse = true;
return;
}
if (strcmp(cmd, "RETURNCUP") == 0) {
cupReturnPulse = true;
return;
}
if (strncmp(cmd, "IRIS", 4) == 0) {
char* endPtr = nullptr;
long pct = strtol(cmd + 4, &endPtr, 10);
if (endPtr == cmd + 4 || *endPtr != '\0') {
Serial.println("Formato invalido. Usa IRIS60");
return;
}
pct = clampLong(pct, 0, 100);
requestedIrisPct = (uint8_t)pct;
applyIris();
lastIssuedIrisPct = requestedIrisPct;
return;
}
if (strncmp(cmd, "ANG", 3) == 0) {
char* endPtr = nullptr;
long ang = strtol(cmd + 3, &endPtr, 10);
if (endPtr == cmd + 3 || *endPtr != '\0') {
Serial.println("Formato invalido. Usa ANG90");
return;
}
if (ang < 0 || ang > 180) {
Serial.println("Angulo invalido. 0 a 180.");
return;
}
moverServoA((int)ang);
return;
}
if (autoSequenceActive()) {
if (strcmp(cmd, "HOME1") == 0 || strcmp(cmd, "HOME2") == 0 ||
strcmp(cmd, "J1+") == 0 || strcmp(cmd, "J1-") == 0 ||
strcmp(cmd, "J2+") == 0 || strcmp(cmd, "J2-") == 0 ||
strcmp(cmd, "STOP1") == 0 || strcmp(cmd, "STOP2") == 0 ||
strncmp(cmd, "P1", 2) == 0 || strncmp(cmd, "P2", 2) == 0) {
Serial.println("Secuencia automática activa. Espera a que termine.");
return;
}
}
if (strcmp(cmd, "HOME1") == 0) {
axisStartHome(axis1, "M1");
return;
}
if (strcmp(cmd, "HOME2") == 0) {
axisStartHome(axis2, "M2");
return;
}
if (strcmp(cmd, "J1+") == 0) {
axisStartJog(axis1, "M1", +1);
return;
}
if (strcmp(cmd, "J1-") == 0) {
axisStartJog(axis1, "M1", -1);
return;
}
if (strcmp(cmd, "J2+") == 0) {
axisStartJog(axis2, "M2", +1);
return;
}
if (strcmp(cmd, "J2-") == 0) {
axisStartJog(axis2, "M2", -1);
return;
}
if (strcmp(cmd, "STOP1") == 0) {
axisStopImmediate(axis1);
Serial.println("M1 detenido");
return;
}
if (strcmp(cmd, "STOP2") == 0) {
axisStopImmediate(axis2);
Serial.println("M2 detenido");
return;
}
if (strncmp(cmd, "P1", 2) == 0) {
char* endPtr = nullptr;
long delta = strtol(cmd + 2, &endPtr, 10);
if (endPtr == cmd + 2 || *endPtr != '\0') {
Serial.println("Formato invalido. Usa P1+1000 o P1-500");
return;
}
axisStartRelative(axis1, "M1", delta);
return;
}
if (strncmp(cmd, "P2", 2) == 0) {
char* endPtr = nullptr;
long delta = strtol(cmd + 2, &endPtr, 10);
if (endPtr == cmd + 2 || *endPtr != '\0') {
Serial.println("Formato invalido. Usa P2+1000 o P2-500");
return;
}
axisStartRelative(axis2, "M2", delta);
return;
}
if (cmd[0] == 'D' || cmd[0] == 'I') {
char* endPtr = nullptr;
long valor = strtol(cmd + 1, &endPtr, 10);
if (endPtr == cmd + 1 || *endPtr != '\0') {
Serial.println("Formato invalido. Ejemplos: D50, I100, D0");
return;
}
if (valor < 0 || valor > 100) {
Serial.println("Valor invalido. Debe estar entre 0 y 100");
return;
}
requestedMotorPct = (uint8_t)valor;
requestedDir = (cmd[0] == 'D') ? 0 : 1;
applyCrusherMotor();
lastIssuedMotorPct = requestedMotorPct;
lastIssuedDir = requestedDir;
return;
}
if (strcmp(cmd, "ESTADO") == 0) {
imprimirEstadoUnaVez();
return;
}
if (strcmp(cmd, "AYUDA") == 0) {
imprimirAyuda();
return;
}
Serial.println("Comando no reconocido. Escribe AYUDA.");
}
void leerSerialNoBloqueante() {
while (Serial.available() > 0) {
char ch = Serial.read();
if (ch == '\n' || ch == '\r') {
if (idxRx > 0) {
bufferRx[idxRx] = '\0';
procesarComando(bufferRx);
idxRx = 0;
}
} else if (ch == ' ' || ch == '\t') {
// ignorar
} else {
if (idxRx < sizeof(bufferRx) - 1) {
bufferRx[idxRx++] = ch;
} else {
idxRx = 0;
Serial.println("Comando demasiado largo");
}
}
}
}
// =====================================================
// SETUP AXIS
// =====================================================
void setupAxis(
StepperAxis &ax,
AccelStepper* stepperObj,
uint8_t stepPin,
uint8_t dirPin,
uint8_t limitPin,
bool limitActiveLevel,
bool invertDir,
int8_t homeDir,
float runSpeed,
float runAccel,
long rangeSteps,
float homeFast,
float homeSlow,
float homeBackoff
) {
ax.stepper = stepperObj;
ax.stepPin = stepPin;
ax.dirPin = dirPin;
ax.limitPin = limitPin;
ax.limitActiveLevel = limitActiveLevel;
ax.invertDir = invertDir;
ax.homeDir = homeDir;
ax.maxSpeed = runSpeed;
ax.accel = runAccel;
ax.rangeSteps = rangeSteps;
ax.homeFastSpeed = homeFast;
ax.homeSlowSpeed = homeSlow;
ax.homeBackoffSpeed = homeBackoff;
pinMode(ax.limitPin, INPUT);
ax.stepper->setPinsInverted(ax.invertDir, false, false);
ax.stepper->setMaxSpeed(ax.maxSpeed);
ax.stepper->setAcceleration(ax.accel);
ax.stepper->setMinPulseWidth(4);
ax.stepper->setCurrentPosition(0);
ax.targetMachinePos = 0;
ax.homePhase = HOME_IDLE;
}
// =====================================================
// SETUP / LOOP
// =====================================================
void setup() {
Serial.begin(115200);
NextionSerial.begin(NEXTION_BAUD, SERIAL_8N1, NEXTION_RX_PIN, NEXTION_TX_PIN);
bool ok1 = ledcAttach(PIN_RPWM, PWM_FREQ_MOTOR, PWM_RES_MOTOR);
bool ok2 = ledcAttach(PIN_LPWM, PWM_FREQ_MOTOR, PWM_RES_MOTOR);
bool ok3 = ledcAttach(PIN_SERVO, PWM_FREQ_SERVO, PWM_RES_SERVO);
if (!ok1 || !ok2 || !ok3) {
Serial.println("Error configurando PWM LEDC");
while (true) {}
}
pinMode(PIN_PUERTA, INPUT_PULLUP);
bool estadoInicialPuerta = leerPuertaCrudaCerrada();
puertaCerradaRaw = estadoInicialPuerta;
puertaCerradaRawAnterior = estadoInicialPuerta;
puertaCerradaEstable = estadoInicialPuerta;
setupAxis(axis1, &stepper1, M1_STEP_PIN, M1_DIR_PIN, M1_LIMIT_PIN,
LIMIT1_ACTIVE_LEVEL, M1_INVERT_DIR, M1_HOME_DIR,
M1_MAX_SPEED, M1_ACCEL, M1_RANGE_STEPS,
M1_HOME_FAST_SPEED, M1_HOME_SLOW_SPEED, M1_HOME_BACKOFF_SPEED);
setupAxis(axis2, &stepper2, M2_STEP_PIN, M2_DIR_PIN, M2_LIMIT_PIN,
LIMIT2_ACTIVE_LEVEL, M2_INVERT_DIR, M2_HOME_DIR,
M2_MAX_SPEED, M2_ACCEL, M2_RANGE_STEPS,
M2_HOME_FAST_SPEED, M2_HOME_SLOW_SPEED, M2_HOME_BACKOFF_SPEED);
tCambioPuerta = millis();
tReporte = 0;
tRampa = millis();
tServo = millis();
tNextionFeedback = 0;
servoAnguloActual = clampInt(SERVO_ANGULO_CERRADO, 0, 180);
servoAnguloObjetivo = servoAnguloActual;
escribirServoAngulo(servoAnguloActual);
requestedIrisPct = 0;
appliedIrisPct = 0;
apagarMotorPorSeguridad();
lastDoorFeedbackSent = -1;
autoSeqState = AUTOSEQ_STARTUP_HOME_Z;
autoSeqStepStarted = false;
startupHomingDone = false;
Serial.println("Sistema listo.");
Serial.println("UART Nextion lista en GPIO23(RX) y GPIO25(TX)");
Serial.println("Steppers con AccelStepper.");
Serial.println("Home silencioso con runSpeed(): liberar -> buscar -> retroceder -> buscar lento.");
Serial.println("Microstepping 1/16 aplicado a ambos ejes.");
imprimirAyuda();
Serial.printf("Estado inicial puerta: %s\n",
puertaCerradaEstable ? "CERRADA" : "ABIERTA");
Serial.printf("Servo inicial: %d grados\n", servoAnguloActual);
Serial.printf("M1_RANGE_STEPS = %ld\n", M1_RANGE_STEPS);
Serial.printf("M2_RANGE_STEPS = %ld\n", M2_RANGE_STEPS);
Serial.printf("M2_RETURN_CUP_Y_STEPS = %ld\n", M2_RETURN_CUP_Y_STEPS);
}
void loop() {
leerSerialNoBloqueante();
readNextionFrames();
actualizarPuerta();
updateAutoSequence();
applyRequestedStateIfChanged();
actualizarRampaMotor();
actualizarServo();
handleCupRemove();
handleCupReturn();
axisUpdate(axis1, "M1");
axisUpdate(axis2, "M2");
updateHmiFeedback();
reportarEstadoSistema();
9. Biomaterial Production Workflow
BIOCRUSHER was designed to support the complete workflow required for Bio-Paper production using Amazonian fibers. The process begins with fiber cutting, where organic materials are shredded into smaller pieces to facilitate further processing. After shredding, the fibers undergo an ash cooking stage to soften the material and prepare it for blending.
The processed fibers are then blended with water to create a homogeneous pulp suitable for sheet formation. Finally, the pulp is pressed and dried to produce Bio-Paper sheets that are biodegradable, recyclable, and environmentally friendly. This workflow demonstrates how engineering, sustainability, and biomaterials research can be integrated into a functional fabrication system.
10. Testing and Validation
Multiple testing sessions were carried out to validate the mechanical, electronic, and automation systems integrated into BIOCRUSHER. The machine was tested with different organic fibers to analyze shredding efficiency, torque behavior, motor performance, and material flow stability. These tests allowed the team to identify mechanical adjustments and optimize the cutting system for better performance.
The validation process also included monitoring sensor data, verifying electronic communication, and testing automation sequences during machine operation. Through iterative improvements, the team optimized component alignment, control logic, and structural stability to ensure safe and reliable operation. This stage was essential for confirming the integration and functionality of the complete system.
11. Difficulties and Solutions
One of the main challenges during the project was achieving proper synchronization between the cutting system and the transmission components. Initial tests revealed alignment issues that generated friction and unstable blade movement. To solve this problem, the team redesigned support structures, improved shaft alignment, and reinforced the cutting chamber to reduce vibration during operation.
Another challenge involved integrating multiple electronic systems while maintaining stable power distribution and reliable sensor communication. Through testing and debugging, wiring organization and PCB integration were optimized to improve automation reliability and machine safety. These iterative improvements helped the team better understand the importance of multidisciplinary engineering integration and problem-solving.
12. Sustainability and Social Impact
BIOCRUSHER was designed not only as a fabrication machine but also as a sustainable technology platform capable of generating environmental and social impact. By using local Amazonian fibers and agricultural waste, the project promotes circular material use and reduces dependence on industrial paper production processes. The machine supports biomaterial experimentation while encouraging sustainable resource utilization and ecological awareness.
The project also emphasizes accessibility, education, and collaborative innovation by combining open technologies with local knowledge and digital fabrication tools. BIOCRUSHER demonstrates how engineering and community-based innovation can contribute to environmental sustainability while empowering local fabrication ecosystems and educational initiatives.
13. Personal Contribution
As a Mechatronics Engineering student, my contribution to the BIOCRUSHER project focused mainly on the electronic integration, automation system, and technical documentation of the machine. I collaborated in the integration of the ESP32-based control system, sensor connections, motor drivers, and power distribution required for the operation of the shredding and biomaterial processing workflow. I also supported the testing process to validate communication between the electronic components and the mechanical systems, ensuring proper synchronization during machine operation.
Additionally, I contributed to organizing and documenting the technical development of the project, including workflow explanations, fabrication processes, integration stages, and testing evidence. I participated in documenting the PCB integration, automation logic, and machine functionality, helping transform the engineering development into a professional and understandable technical presentation. This experience strengthened my knowledge in multidisciplinary engineering by combining mechanics, electronics, automation, and sustainable fabrication technologies into a single functional system.
14. Individual Reflection
This assignment allowed me to experience the complete process of developing an integrated engineering system that combines mechanics, electronics, automation, sustainability, and digital fabrication. By contributing to the electronic integration and documentation process, I strengthened my understanding of how multidisciplinary systems interact within a functional machine. Working collaboratively with the team also improved my communication, technical problem-solving, and project development skills.
One of the most valuable aspects of BIOCRUSHER was understanding how engineering can contribute to sustainable innovation and environmental solutions using local resources and digital fabrication technologies. This project motivated me to continue exploring the integration of mechatronics, automation, biomaterials, and sustainable manufacturing for future engineering applications.