18. Applications & Implications
JeLamp — Final Project Plan
This week I planned my final project masterpiece JeLamp — a Luxo-inspired desk lamp with gesture-driven lighting and a fixed arm structure that integrates the full range of Fab Academy skills: 2D/3D design, additive and subtractive fabrication, custom electronics, embedded programming, and system integration.
Assignment checklist
- Answered: What will it do?
- Answered: Who has done what beforehand?
- Answered: What sources will you use?
- Answered: What will you design?
- Answered: What materials and components will be used?
- Answered: Where will they come from?
- Answered: How much will they cost? (BOM)
- Answered: What parts and systems will be made?
- Answered: What processes will be used?
- Answered: What questions need to be answered?
- Answered: How will it be evaluated?
- Uploaded summary slide
- Uploaded video clip
- Checked — linked in final presentation schedule
Project Summary
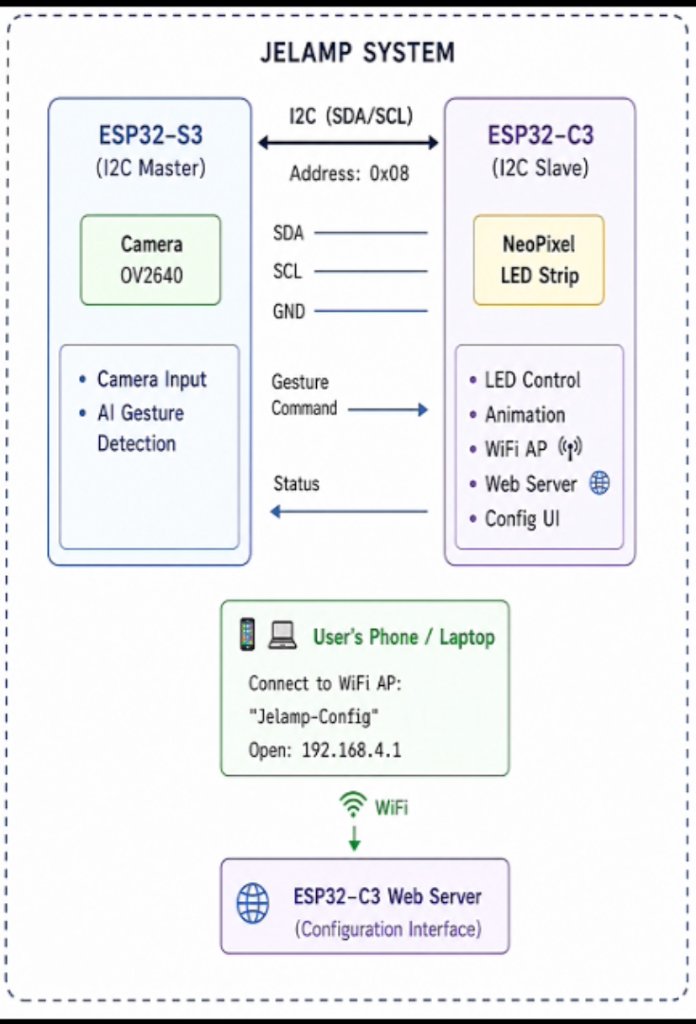
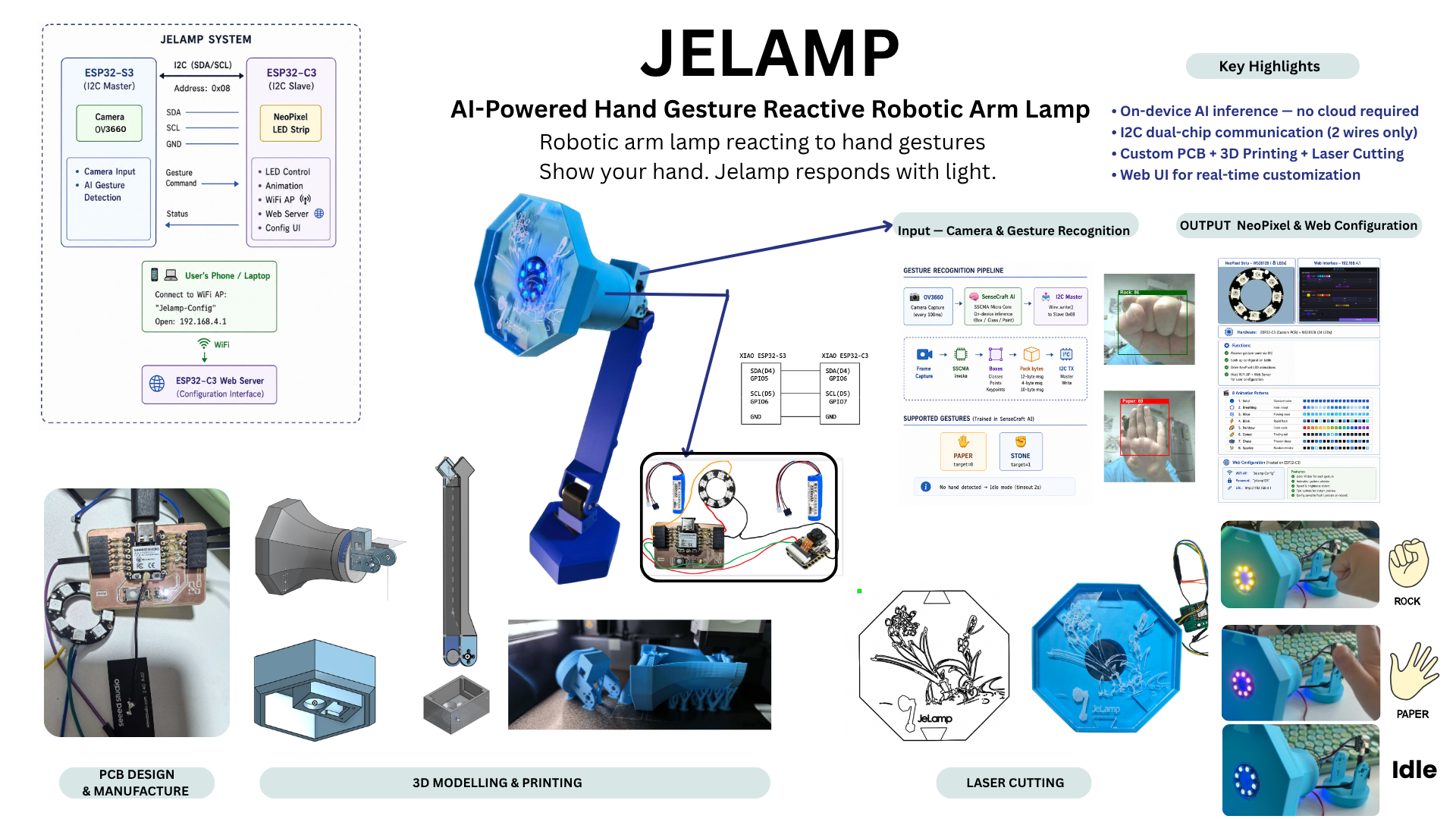
JeLamp is a Pixar Luxo Jr.–inspired desk lamp with giraffe-like proportions. It combines practical lighting with gesture recognition and ambient LED feedback. The lamp senses the user through a camera, responds to hand gestures (including a rock–paper–scissors game), and communicates mood through NeoPixel color patterns. The arm is fixed — three STS3215 housings serve as structural joint connectors only, not actuators.
Controller
XIAO ESP32-S3 Sense — camera, Wi-Fi, NeoPixel output.
Carrier PCB
Custom JeLamp carrier — power, buck converter, NeoPixel connector.
Mechanics
Fixed arm with STS3215 joint connectors; 3D-printed structure; laser-cut lamp head decoration.
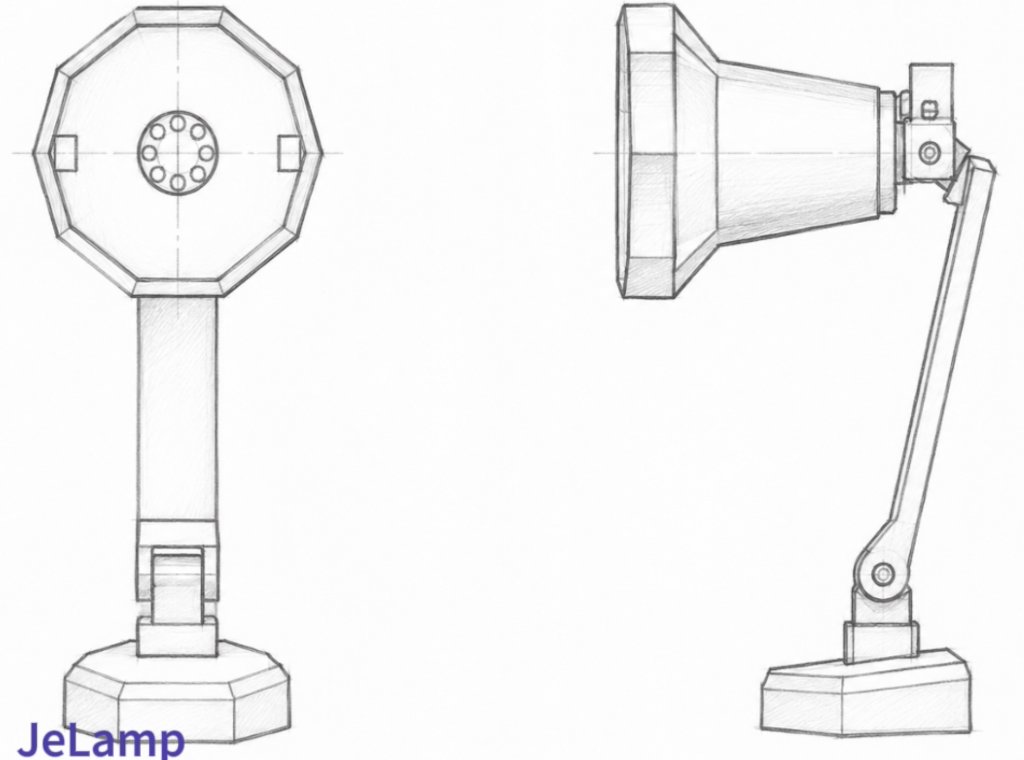
JeLamp concept — Pixar Luxo Jr.–inspired proportions with giraffe-like neck and expressive lamp head.
Full project documentation: Final Project page · Week 16 — System Integration
Assignment Questions
What will it do?
JeLamp is a desk companion that provides adjustable lighting and responsive, pet-like behaviour. Core functions:
- Smart lighting — NeoPixel ring adjusts colour and pattern to match detected gestures.
- Gesture interaction — recognizes hand gestures via camera (SenseCraft AI / Edge Impulse) and responds with light feedback.
- Fixed mechanical structure — Luxo-style arm locked at design pose; STS3215 housings used as joint connectors, not powered servos.
- Ambient feedback — NeoPixel ring changes color and animation pattern to reflect detected gestures or mood modes (Focus, Relaxed, Sleep).
- Wireless control — web interface over Wi-Fi for manual LED control.
Who has done what beforehand?
| Reference | What they did | What I take from it |
|---|---|---|
| Pixar Luxo Jr. | Iconic animated desk lamp with expressive kinematics. | Form language and emotional movement as design goals. |
| LeLamp (open source) | Maker-friendly Luxo-inspired lamp with 3D-printed parts and expressive joints. | Mechanism layout, joint count, reproducible fabrication workflow. |
| Apple ELEGNT research | Expressive and functional movement for non-anthropomorphic robots. | Motion quality principles — smooth transitions, intent communication. |
| Seeed XIAO ESP32-S3 Sense | Compact MCU with camera, mic, and Wi-Fi. | On-device vision without a separate Raspberry Pi. |
| SenseCraft AI / Edge Impulse | No-code and transfer-learning platforms for embedded ML. | Gesture classification pipeline for rock–paper–scissors game. |
What sources will you use?
| Category | Source | How I use it |
|---|---|---|
| Course materials | Fab Academy 2026 — Weeks 6, 8, 10, 11, 15, 16, 17 | PCB design, milling, input/output devices, networking, system integration, ML wildcard |
| Open-source reference | LeLamp (GitHub) | Mechanism layout, STS3215 connector mounting, reproducible 3D-print workflow |
| Research | Apple ELEGNT — expressive movement for non-anthropomorphic robots | Motion design principles: smooth transitions, intent communication |
| Hardware docs | Seeed XIAO ESP32-S3 Sense wiki | Camera pinout, GPIO/servo pins, power requirements, Arduino setup |
| ML platforms | SenseCraft AI, Edge Impulse | Pretrained and custom gesture / facial expression models for on-device inference |
| Electronics design | KiCad documentation, JLCPCB design rules | Schematic capture, PCB layout, Gerber export for fabrication |
| Component datasheets | WS2812B LED datasheet, MP1584 buck converter, standard PWM servo specs | LED timing, power budget, voltage regulation, servo PWM control |
| Mechanical design | Autodesk Fusion 360 tutorials, Chaihuo Fab Lab equipment guides | Parametric arm modeling, 3D print tolerances, laser-cut lamp head decoration |
| Firmware libraries | ESP32Servo / Servo, Adafruit NeoPixel, ESP32 Arduino core | RMT NeoPixel output, Wi-Fi web server |
| Lab resources | Chaihuo Makerspace — KEXU CNC, laser cutter, 3D printers, soldering station | PCB milling, mechanical fabrication, assembly and testing |
What will I design?
- Mechanical structure — fixed arm, base enclosure, lamp head shade (Onshape / Fusion 360).
- JeLamp carrier PCB — power input, protection, 5V buck, NeoPixel output, expansion header (KiCad).
- Embedded firmware — gesture detection, NeoPixel patterns, web server.
- Packaging — cable routing through hollow arm, base enclosure, connector layout.
What materials and components will be used?
See the Bill of Materials below. Key categories: one custom carrier PCB, PLA/TPU 3D prints, laser-cut lamp head decoration, 3× STS3215 housings (joint connectors), WS2812B NeoPixels, XIAO ESP32-S3 Sense, power supply, connectors, and fasteners.
Where will they come from?
| Source | Items |
|---|---|
| Fabricated in-house / ordered | JeLamp carrier PCB (JLCPCB), 3D prints, laser-cut lamp head decoration |
| Seeed Studio | XIAO ESP32-S3 Sense |
| Local hobby supplier | STS3215 housings (×3, structural), connectors, wire |
| Adafruit / local supplier | WS2812B NeoPixel ring |
| Chaihuo Fab Lab | PLA filament, plywood sheet (lamp head), soldering station, CNC access |
How much will they cost?
Estimated BOM total (prototype quantities):
| Item | Qty | Unit cost (est.) | Subtotal |
|---|---|---|---|
| XIAO ESP32-S3 Sense | 1 | ¥90 | ¥90 |
| STS3215 housings (joint connectors) | 3 | ¥35 | ¥105 |
| WS2812B ring (12 LED) | 1 | ¥25 | ¥25 |
| JeLamp carrier PCB (JLCPCB) | 5 | ¥40 | ¥40 |
| PLA filament (~300 g) | 1 | ¥40 | ¥40 |
| Plywood sheet (laser cut — lamp head decoration) | 1 | ¥30 | ¥30 |
| Passives, connectors, wire, screws | — | — | ¥80 |
| 5V 3A USB-C power supply | 1 | ¥40 | ¥40 |
| Estimated total | ~¥420 |
What parts and systems will be made?
| Made by me | Purchased / off-the-shelf |
|---|---|
|
|
What processes will be used?
| Fab Academy skill | Process | Application in JeLamp |
|---|---|---|
| 2D design | Laser cutting | Lamp head decorative cutouts only |
| 3D design | Fusion 360 parametric modeling | Arm segments, joints, lamp head, base enclosure |
| Additive fabrication | FDM 3D printing (PLA/TPU) | Structural links, STS3215 connector pockets, shade holder |
| Subtractive fabrication | CNC milling (KEXU) | PCB trace isolation and outline cutting |
| Electronics design | KiCad schematic + PCB layout | JeLamp carrier PCB |
| Electronics production | Soldering + JLCPCB | Populate and test carrier board |
| Embedded programming | Arduino / ESP-IDF | NeoPixel RMT, camera inference, I2C protocol |
| Input devices | Camera + button | Gesture recognition, touch/mode switching |
| Output devices | NeoPixels | Gesture-mapped ambient light feedback |
| Networking | Wi-Fi HTTP server | Web UI for manual control (Week 15) |
| System integration | Single-board packaging | Carrier PCB, NeoPixels, and camera in one enclosure |
What questions need to be answered?
| Question | Status |
|---|---|
| Can SenseCraft AI gesture model run fast enough for real-time game? | Prototype tested in Week 16 — latency acceptable |
| How to route I2C cables through the fixed arm? | Resolved — hollow printed channels with slack at head joint |
| STS3215 as joint connector vs powered servo? | Decided — use STS3215 housings and horns as structural connectors only; arm does not move |
| Will the carrier PCB from JLCPCB meet power and connector needs? | Design complete; awaiting fabrication and bench test |
How will it be evaluated?
The project succeeds if all of the following work independently and together:
| Criterion | Pass condition |
|---|---|
| Custom PCB | JeLamp carrier board fabricated, populated, and functional with input + output |
| Mechanical structure | Fixed arm assembled with STS3215 connectors locked at design pose — no binding, no actuation |
| Gesture recognition | Camera detects rock / paper / scissors with > 80% accuracy in normal desk lighting |
| LED feedback | NeoPixel ring changes color/pattern in response to detected gesture |
| System integration | All subsystems powered, cabled, and enclosed — not breadboard-only |
| Independent operation | Runs from a single power supply without a laptop connected |
| Documentation | Complete BOM, design files, firmware, 1-minute video, and summary slide |
Implications
JeLamp sits at the intersection of functional furniture and social robotics. Beyond being a desk lamp, it explores how non-anthropomorphic objects can communicate attention and mood through light — ideas relevant to smart home products, educational robotics, and HCI research.
- Accessibility — gesture control may help users who prefer non-touch interaction.
- Privacy — on-device inference (no cloud upload) keeps camera data local.
- Repairability — modular carrier PCB and 3D-printed parts allow field replacement.
- Open documentation — all design files published under CC-NC for other Fab Academy students and makers.
- Energy — ambient light sensing and sleep mode reduce unnecessary power use.
Presentation Materials
Per Fab Academy requirements, a summary slide and one-minute video must be in the root directory of this website. finalized versions are uploaded now
| File | Specification | Status | Link |
|---|---|---|---|
presentation.png |
1920 × 1080 px — name, project name, Fab Lab, photo/render, brief description, "Fab Academy 2026" | View slide | |
presentation.mp4 |
1080p, < 1 minute, < 25 MB — conception, construction, and operation | View video |
Summary Slide
Presentation Video
Final Presentation Schedule
I have verified that my project is listed on the Fab Academy 2026 final presentation schedule: finalprojects.fabacademy.org — 2026 schedule. The summary slide and video above are linked from this documentation site, which is the required hosting location.
| Item | Detail |
|---|---|
| Student | Ning Zhang |
| Project | JeLamp — Expressive Robotic Desk Lamp |
| Fab Lab | Chaihuo Makerspace, Shenzhen |
| Documentation site | gitlab.fabcloud.org — ning-zhang |
| Summary slide | presentation.png (root directory) |
| Presentation video | presentation.mp4 (root directory) |
| Final presentation week | Week 20 — Project Presentations |
Project Schedule
| Week | Milestone | Deliverable |
|---|---|---|
| Week 16 | System integration plan | Architecture diagram, assembly plan, subsystem wiring |
| Week 17 | Wildcard — facial expression ML | Edge Impulse model on XIAO ESP32-S3 Sense |
| Week 18 | Applications & Implications | This plan, BOM, evaluation criteria, presentation materials |
| Week 19 | Invention, IP & Income | CC BY-NC license, dissemination plan, business models |
| Week 20 | Final presentation (due June 4, 2026) | Working demo, final presentation.png, presentation.mp4 |
Reflection
Planning JeLamp through the Applications & Implications questions forced me to think beyond individual weekly exercises. A lamp that only lights up is easy; a lamp that behaves requires coordinating mechanics, power budget, communication protocols, ML inference speed, and enclosure design simultaneously. The BOM and schedule make the scope concrete — I now know exactly which parts I must fabricate myself (one carrier PCB, prints, firmware) versus which I can buy (STS3215 housings, LED ring, MCU module).