Zholdas
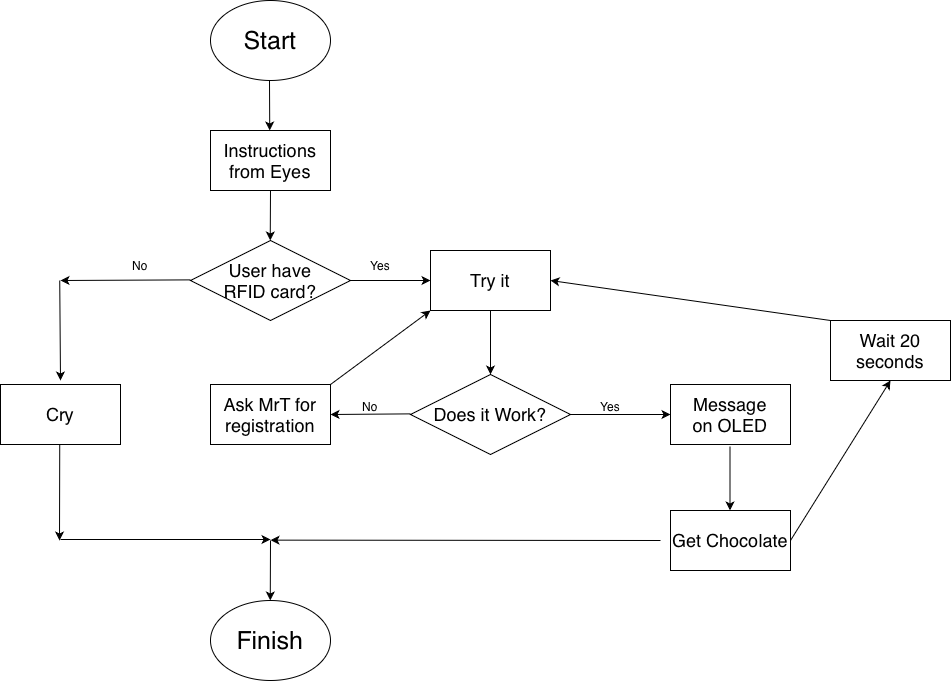
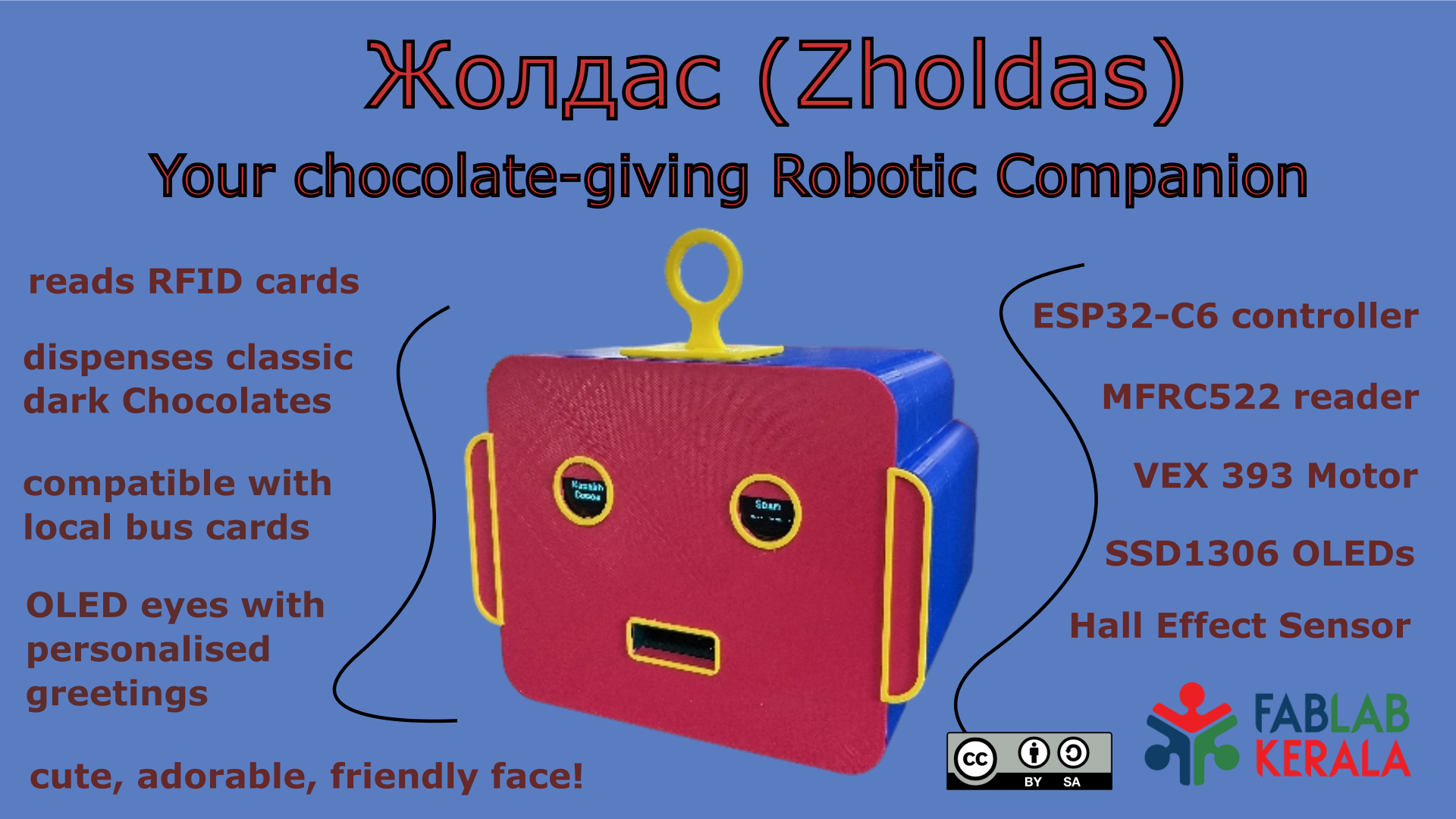
Zholdas is your friendly chocolate-giving Robotic friend. He gives chocolate to children and those young at heart. The chocolate is accessed by regular RFID cards, bus cards and key fobs. Regular visitors recieve personalized messages in addition to the chocolate.
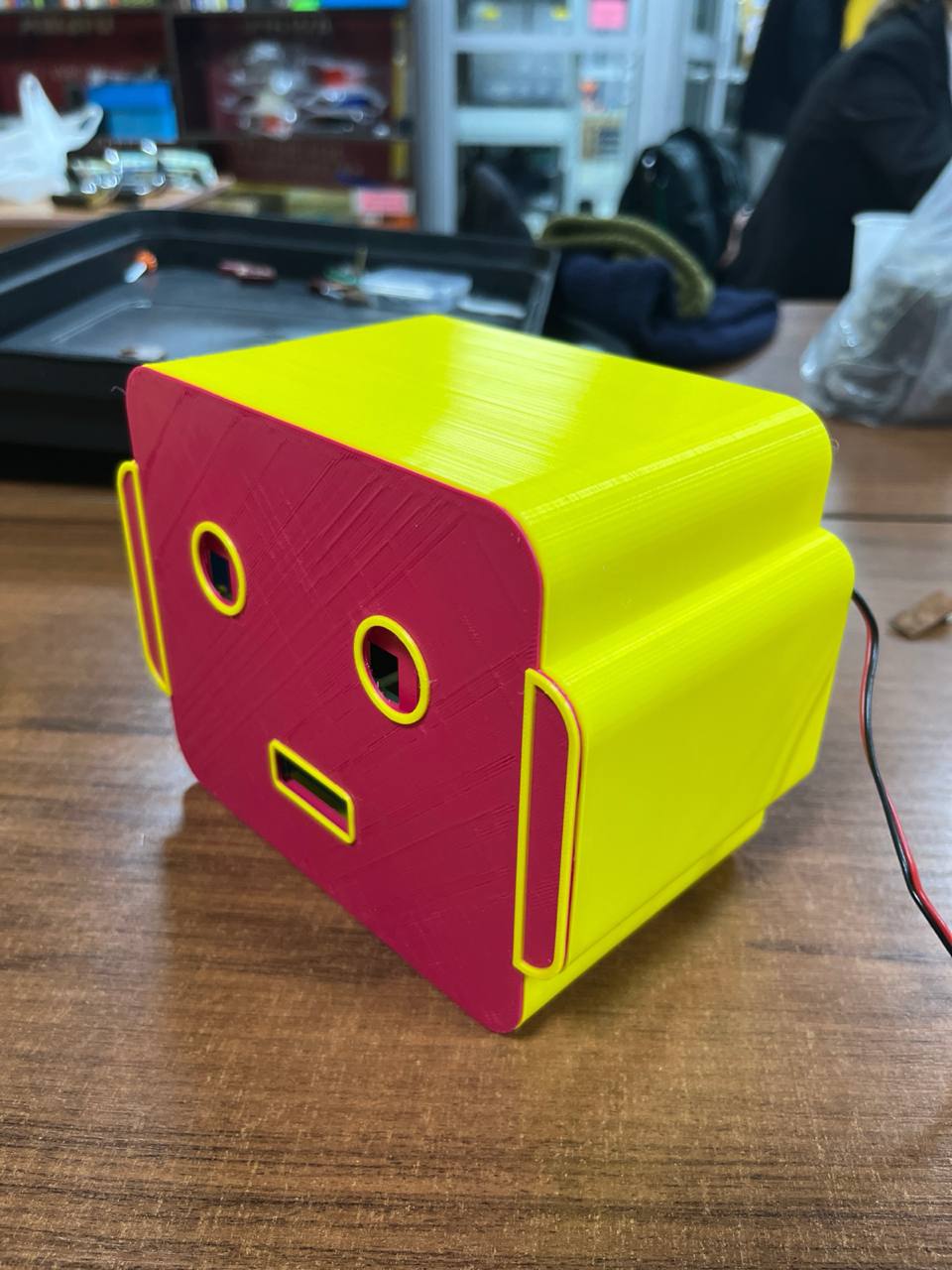
Zholdas has a cheery and loving disponsition. His internal dispensing mechanism is powered by a VEX 393 Motor and his eyes are a air of standard SSD1306 OLED displays. As his name suggests, Zholdas is indeed a loyal and good friend, sharing smiles and chocolate.
Project Slide:
Project Video:
Development Sub-Pages:
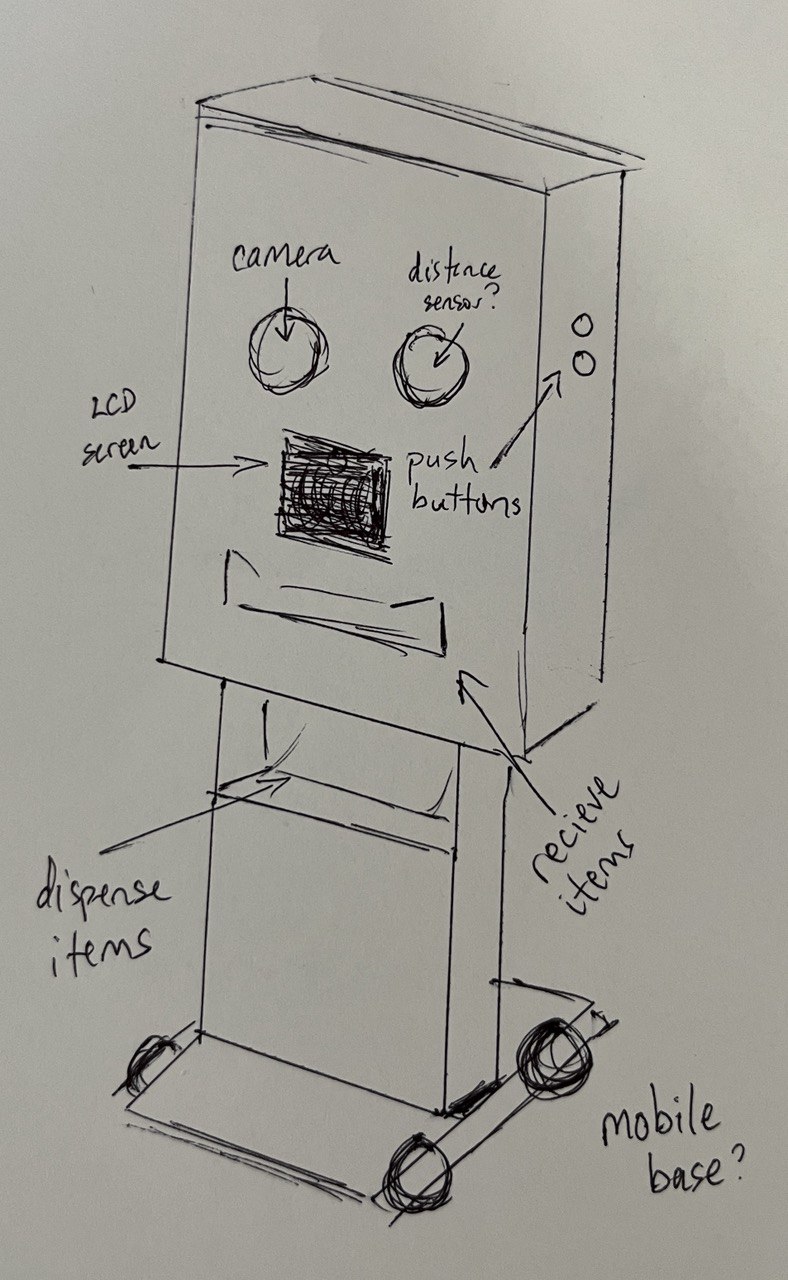
Initial Idea
System Integration
Application & Implication

Project Development