Mechanical Design, Machine Design
Assignment(Mechanical Design)
Assignment(Machine Design)
All the important links are Here
Learning outcomes
Group Assignment
For further information, please check our Group AssignmentFor our group assignment, we're building a 3D scanner designed to capture detailed models of objects. Our machine features a rotating platform where objects are placed, allowing for comprehensive scanning from different angles. Additionally, we've incorporated a curved motion arm that holds the scanner, enabling precise movement along the z-axis. This setup ensures we can capture intricate details and create accurate 3D models of scanned objects.
My role:
Firstly we distributed our work amongst ourselves in which my role is to integrate the mechanical, electronic, and control system components. This includes final assembly, testing of the complete system, and ensuring that everything works together seamlessly. And to find similiar projects like our 3D scanner to get more ideas to further improve our initial designs.
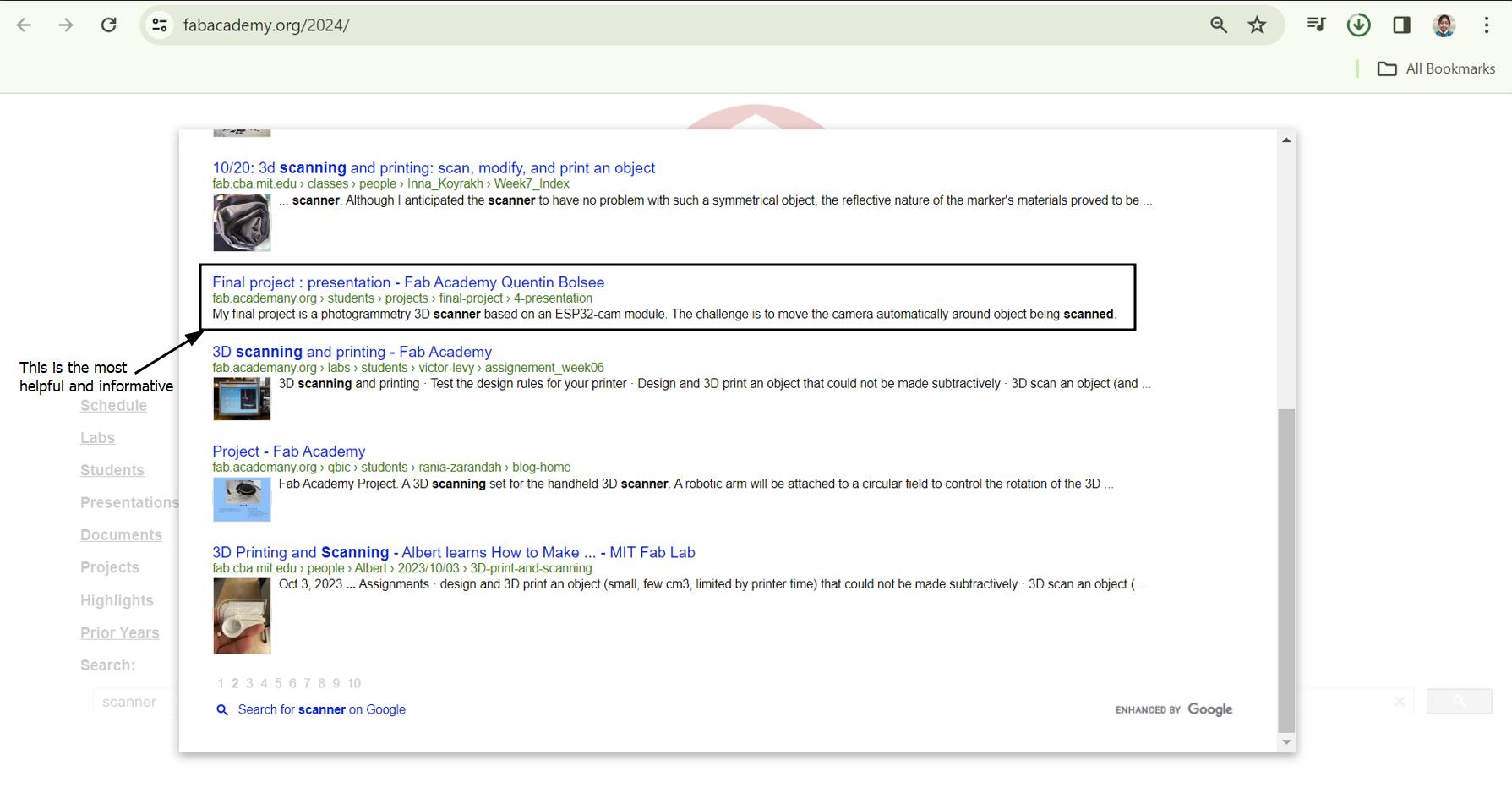
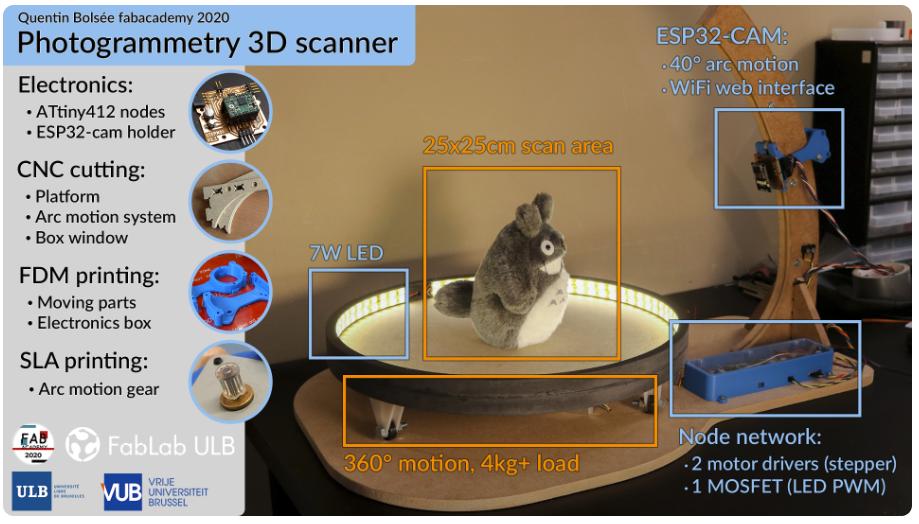
We found many projects that were similiar to ours using the Fab Academy search bar using keywords relating to our project. The most similiar and informative was Quentin's final project
We also had to test the outcomes of different ways of scanning our object since we are planning on using a mobile phone and Poly cam software for 3D scanning.
Testing multiple times in differnt ways to find the best one
This is Yangtshel, holding the scanner still, while I move the object. Thank you Yangtsehl for holding the camera very still!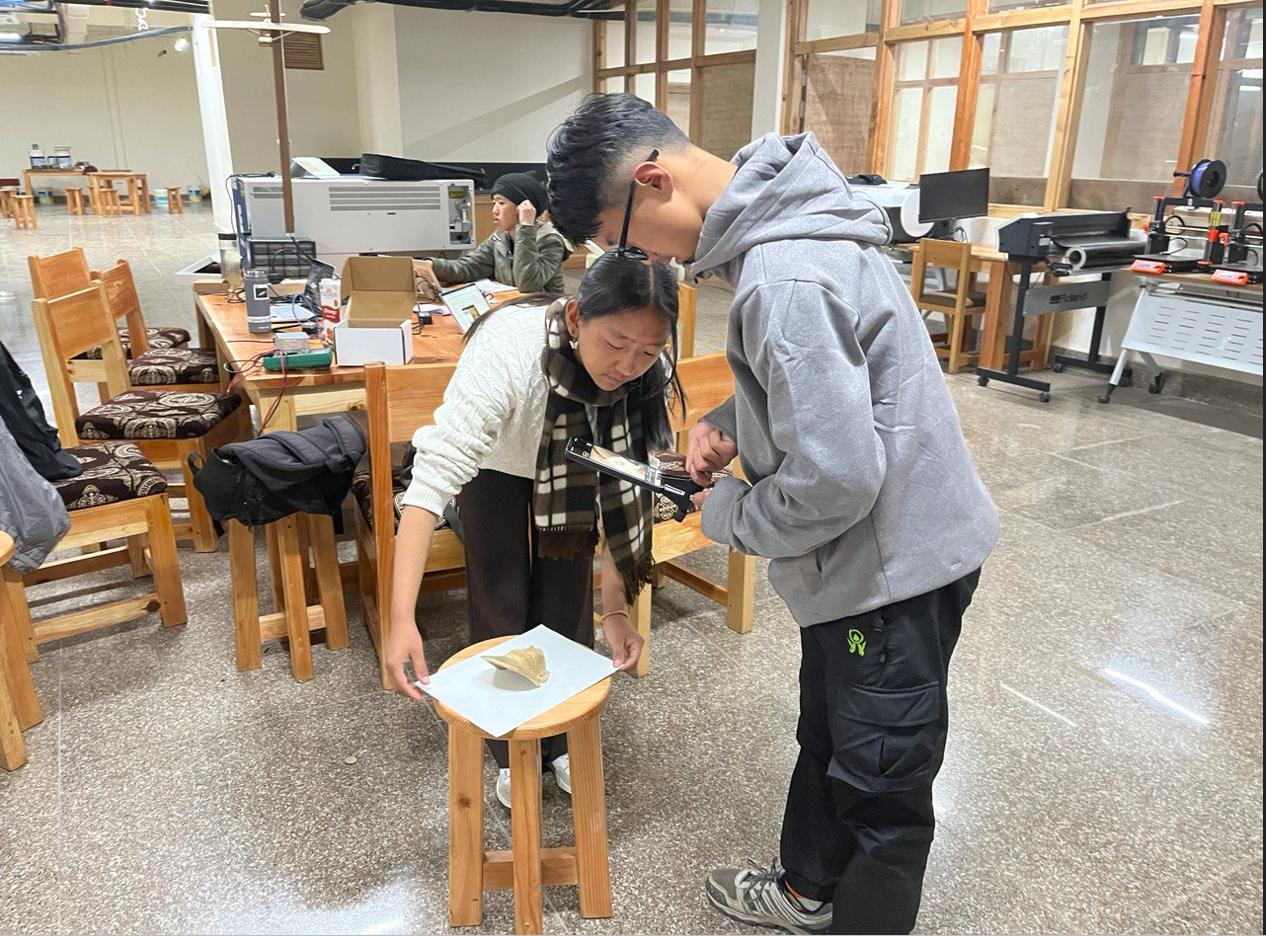

Testing the best way on the fabricated gears.


Tested the fabricated parts as well
Change of plans
We will be spinning the platform the object will be placed and the scanner will stay stiil in one place but, moving only vertically. We placed an object in the prototype of the platform and scanned the object.
The scanner was placed 10cm away from the platform and moved to an angle of approximately 50 degrees and 72 degree
The result is as follows: For our gear design we used the Involute Spur Gear Builder v2.0 We chose this gear design