My Final Project
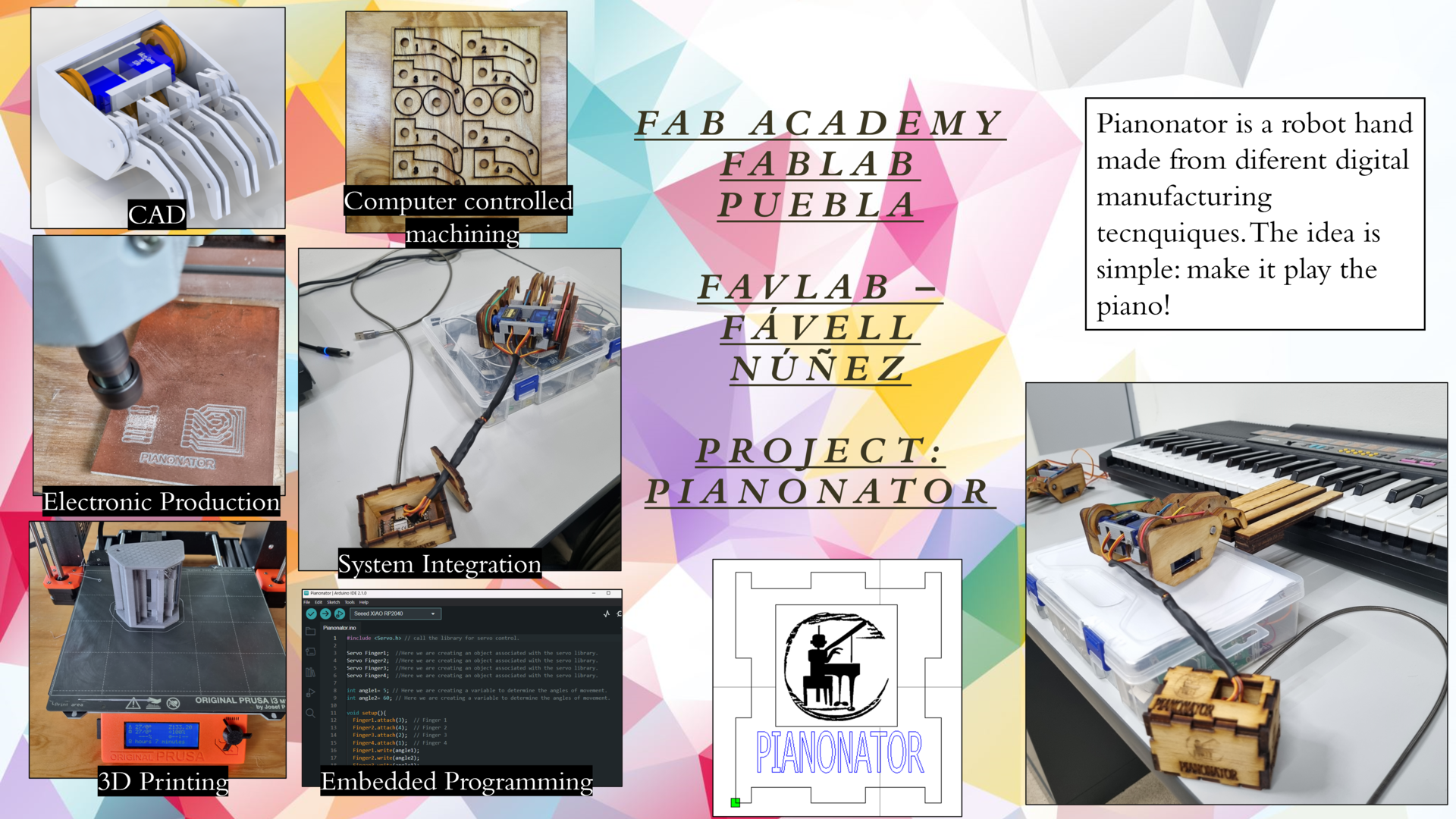
Pianonator
A few months ago I started learning piano, but it hasn't gone so well. I'm going blame the lack
of determination. So I'm going to use this opportunity to build some motivation. I'm a very competitive
man, so I'll create some competition.
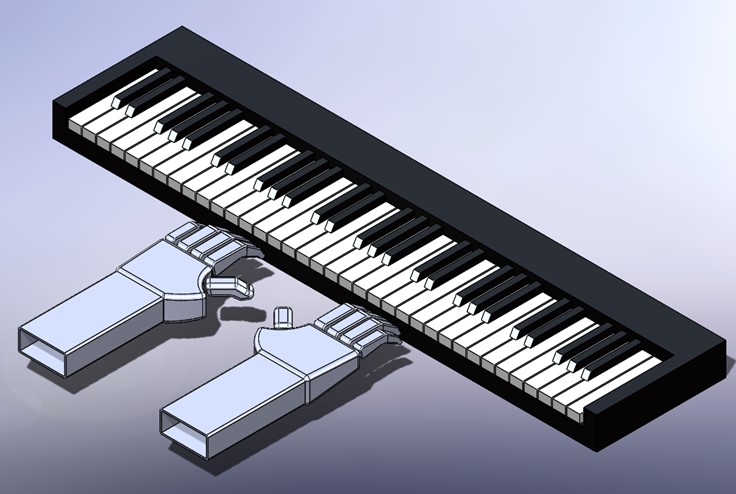
So what about a piano playing robot?
Oh yeah, the one on the right is me.
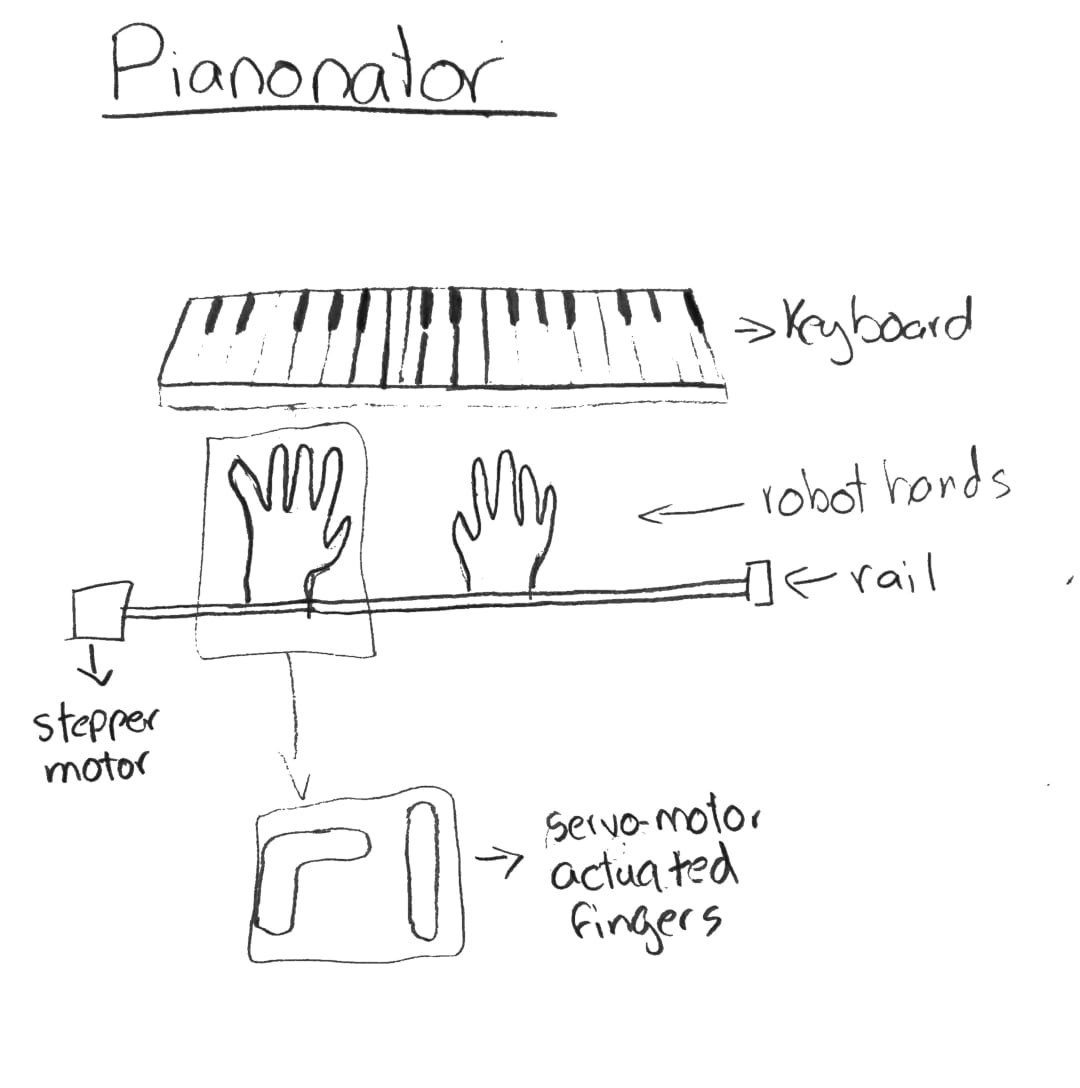
First sketch
The pianonator will consist of a pair of robotic hands with 10 servo-controlled fingers. The robot hands will be a model of a human hand. They will move along the keybord through a rail controlled by a stepper motor.
Motion and Pose Analisis


Week 2 - Update
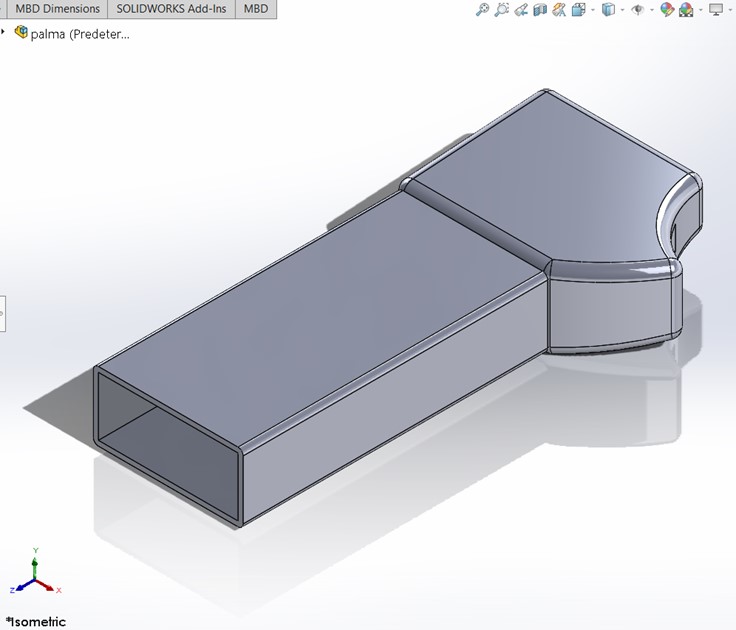
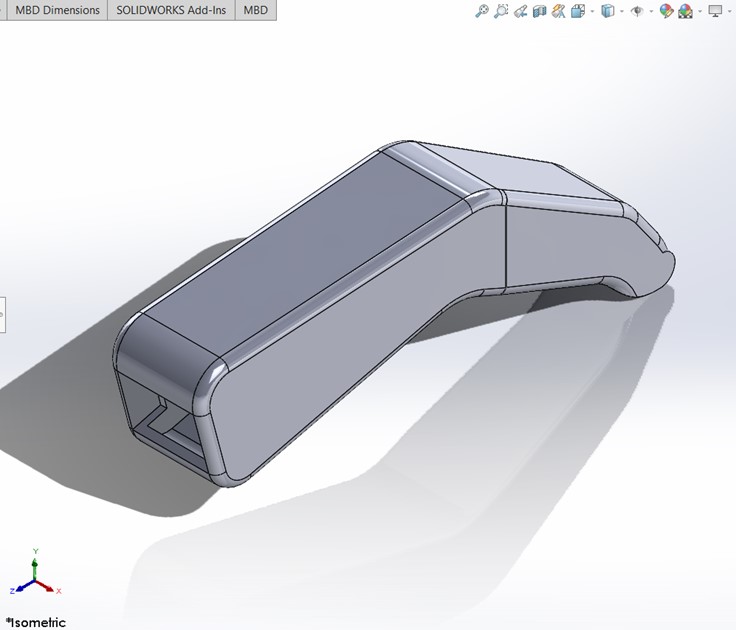
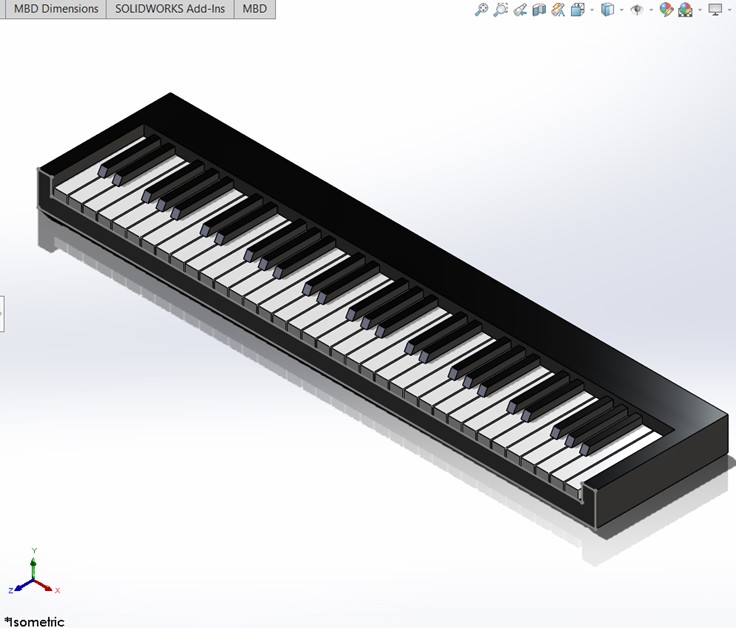
First 3D models
Week 3 - Update
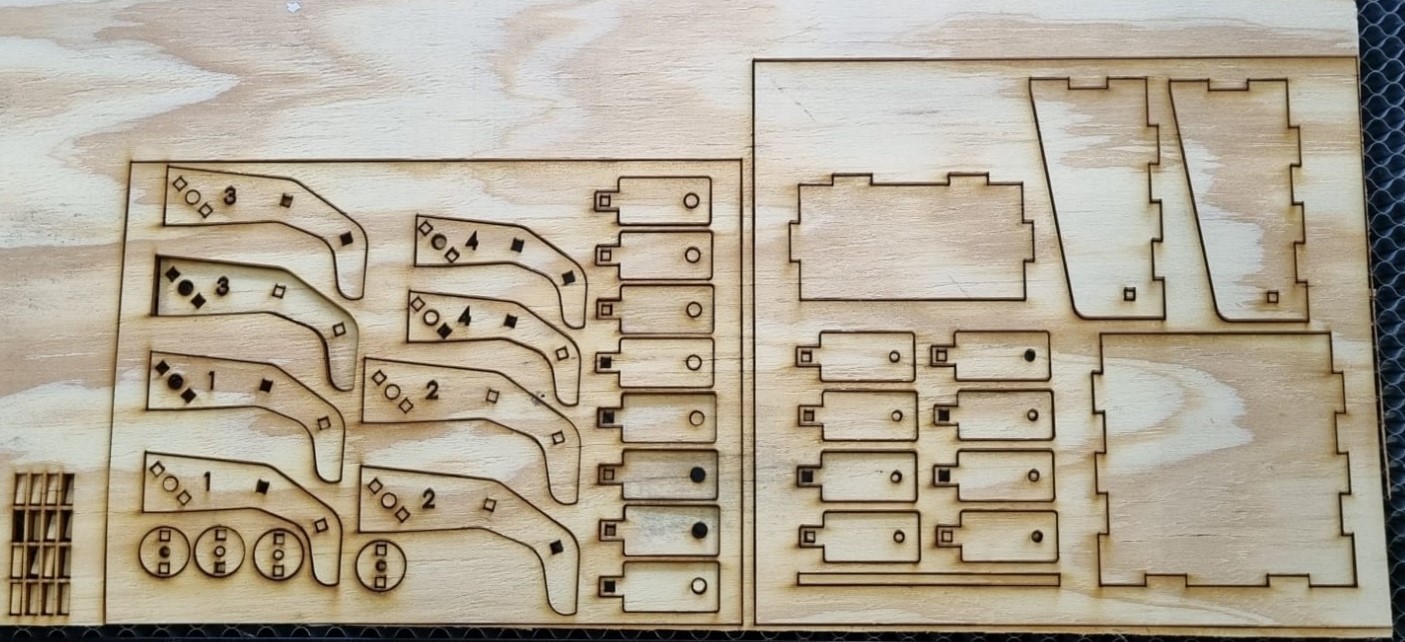
Laser cutter version
Week 4 - Update
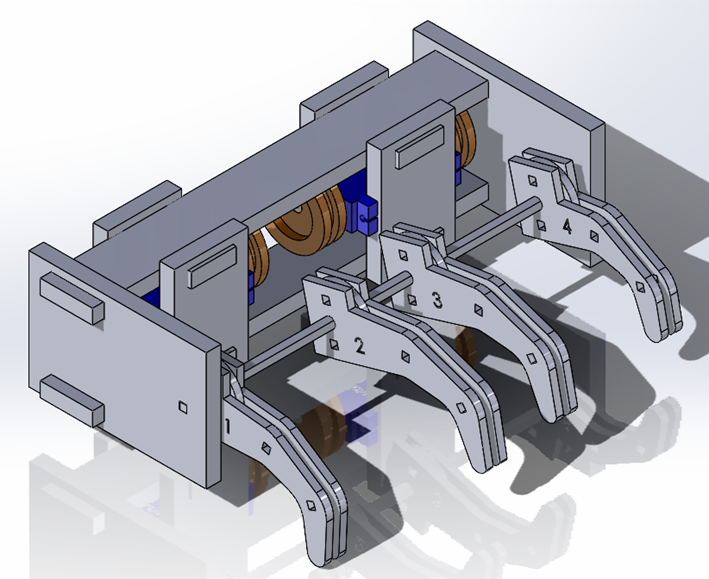
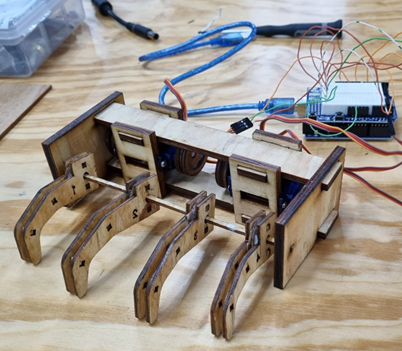
First prototype
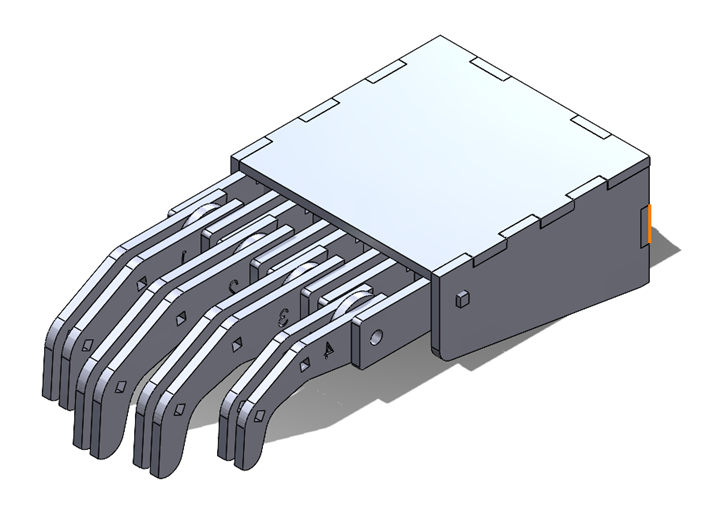
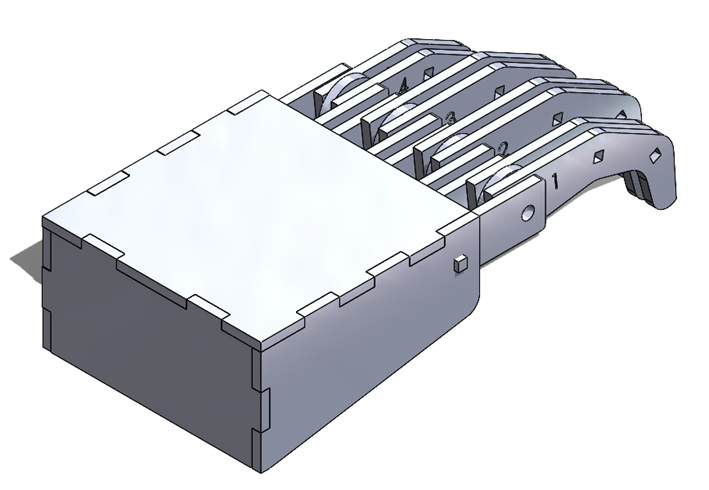
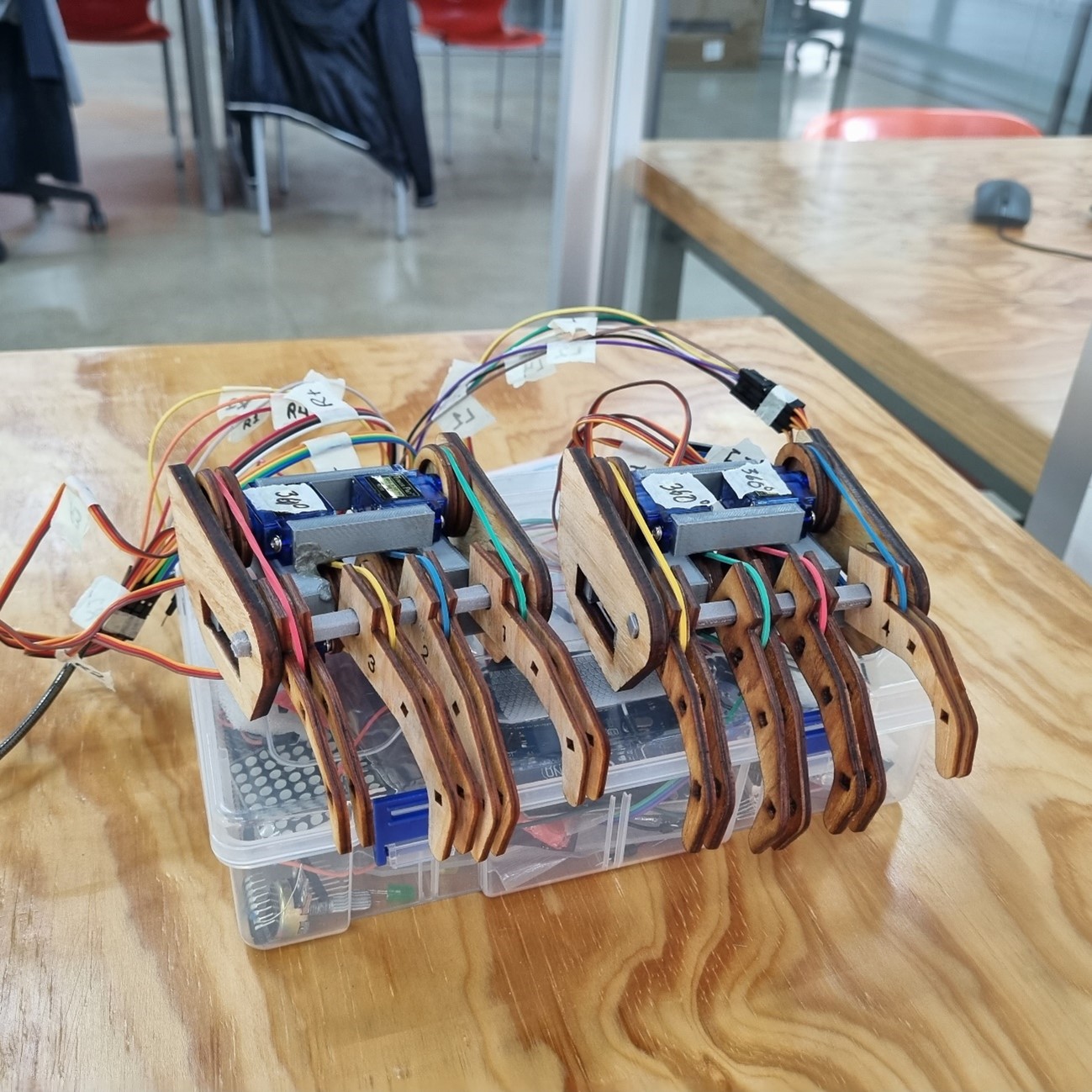
This is the current configuration for one of the hands of the pianonator:
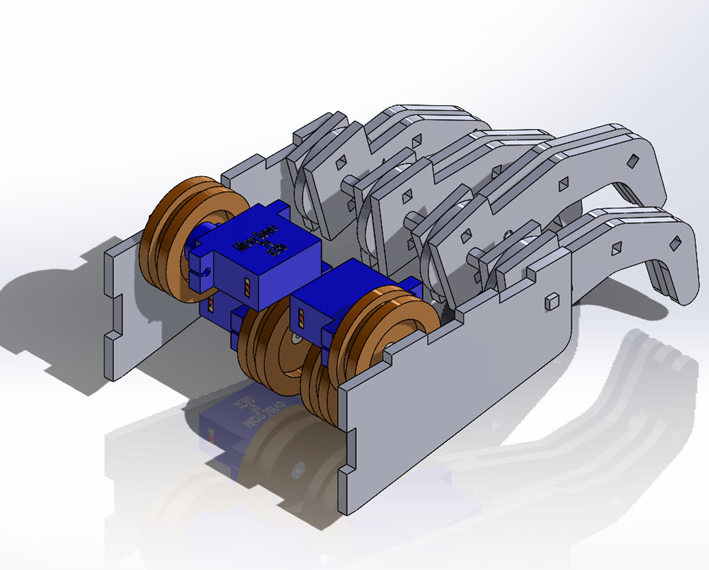
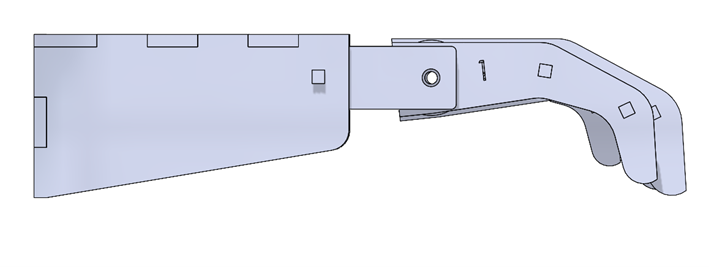
This configuration uses servomotors to move the fingers. I decided to use a belt and puller mechanism to transfer the movement. For the first prototype I'm going to try the movement, with a simpler design, as you can see in the following image:
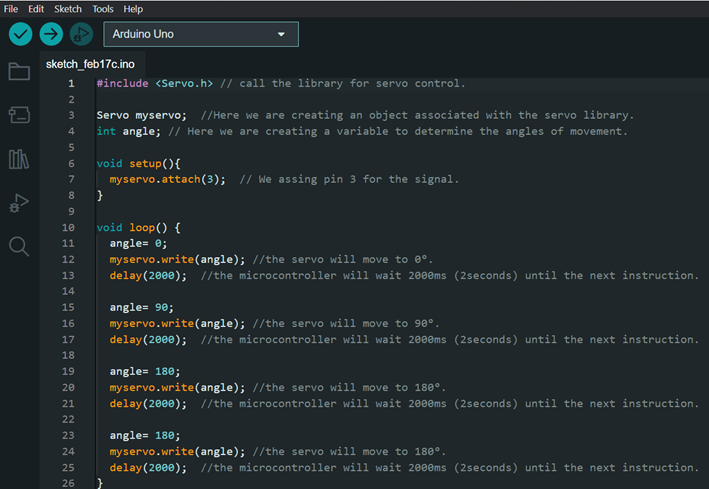
First, I'm going to try to control a servo motor with a simple program:
Now, that with a single motor works, I'm going to try a four-servo configuration:
Now, I will arrange the servos with finger and make different tests. First moving the fingers from 0 to 90°.
Then, using serial communication to move all the servos at once with a specific angle that I will provide by typing the number to the computer. This will allow me to know which set of angles are the most appropriate for my finger movements.
Finally, I have the first working prototype of the Pianonator!
Week 13 - Update
I used Wi-Fi to control the pianonator fingers.
Week 17 & 18 - Update
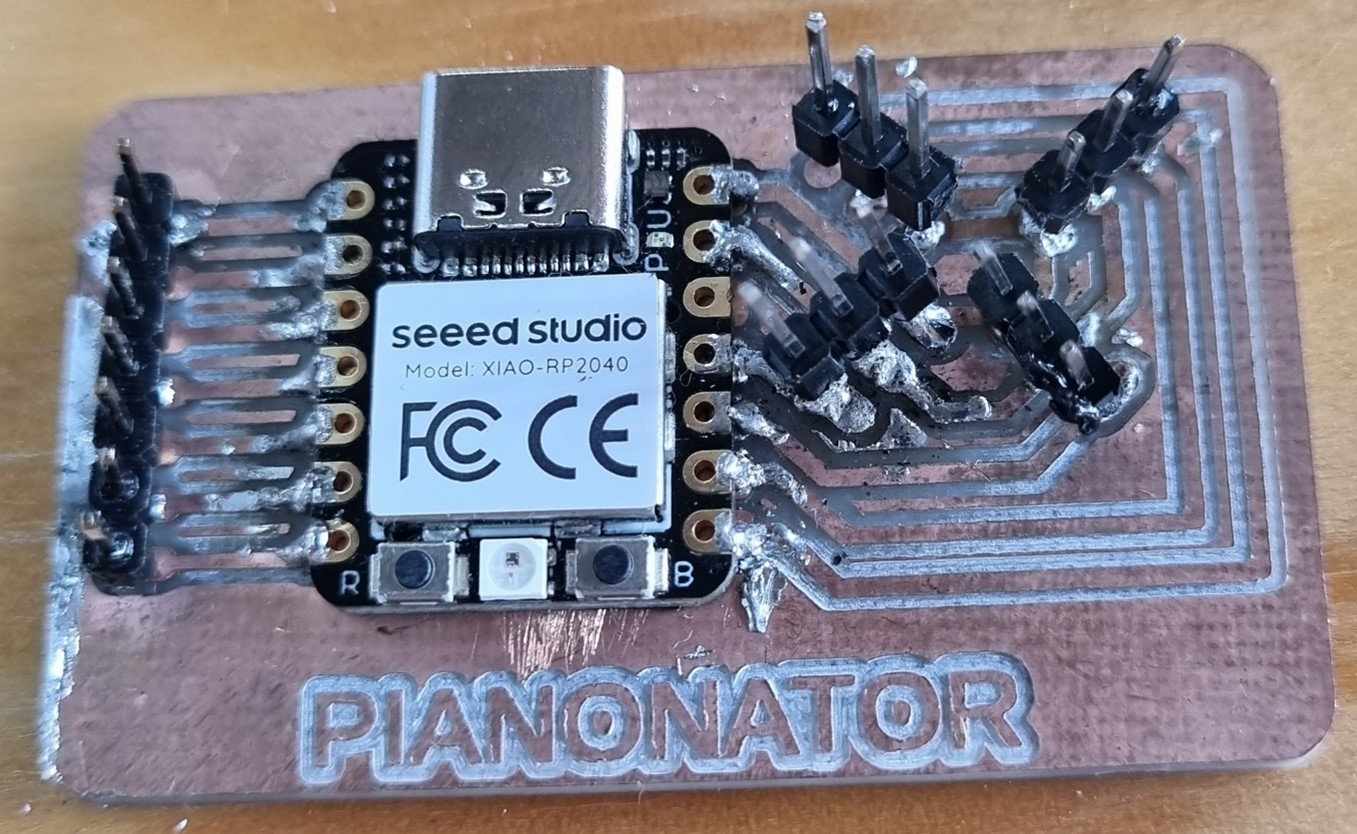
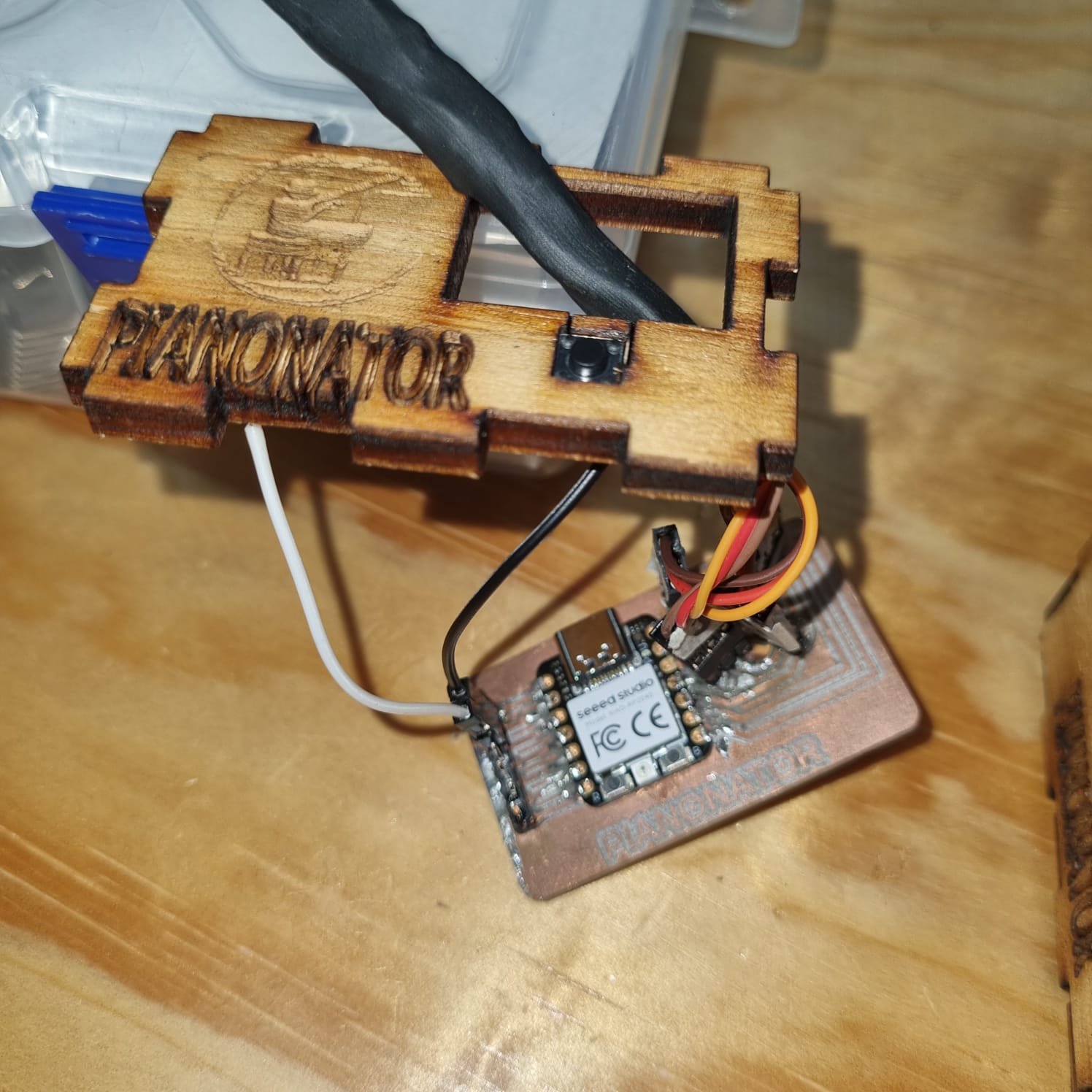
Electronic Design
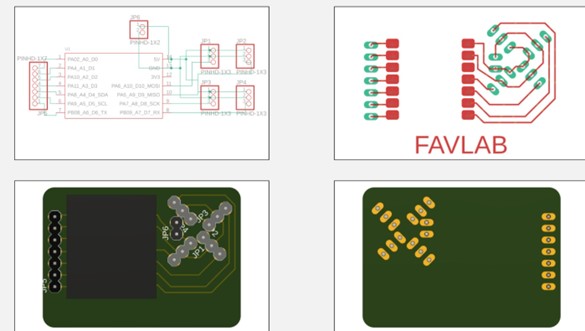
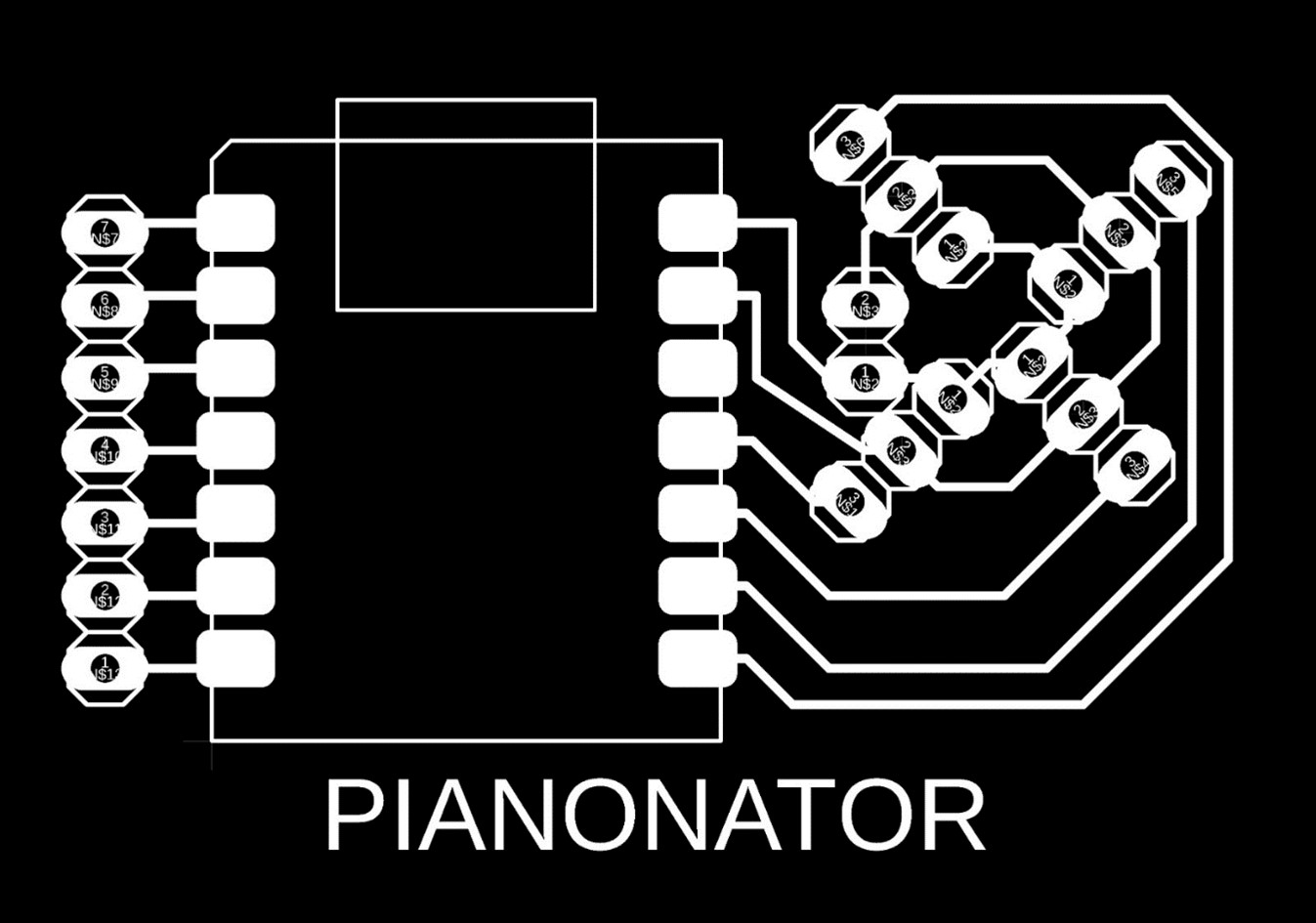
Electronic Production
2D Structure Design
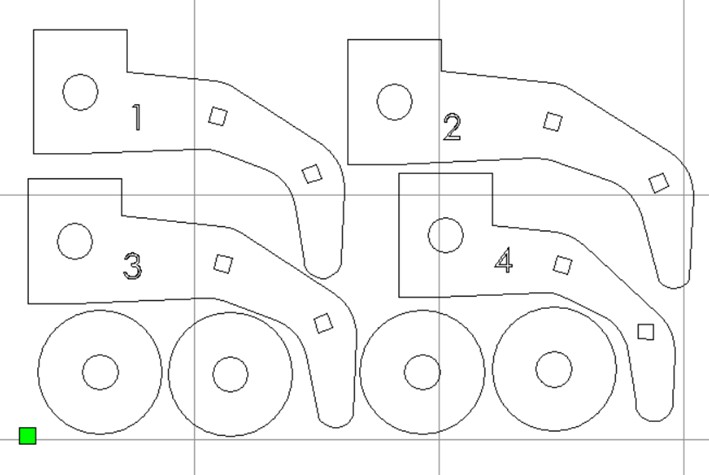

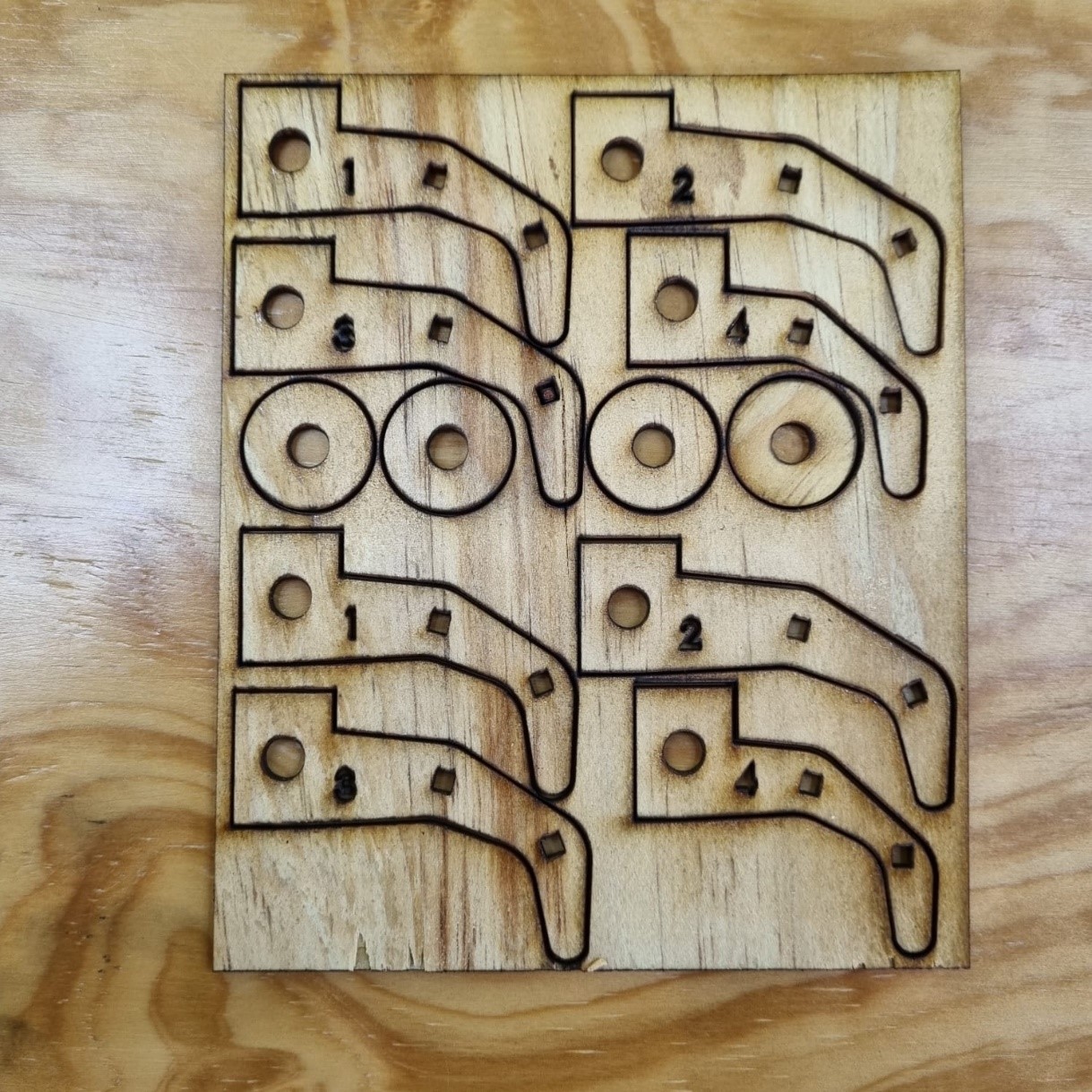
Laser Cut
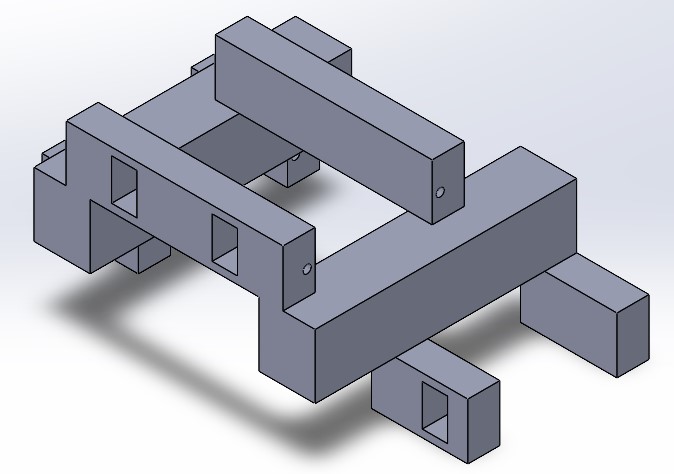
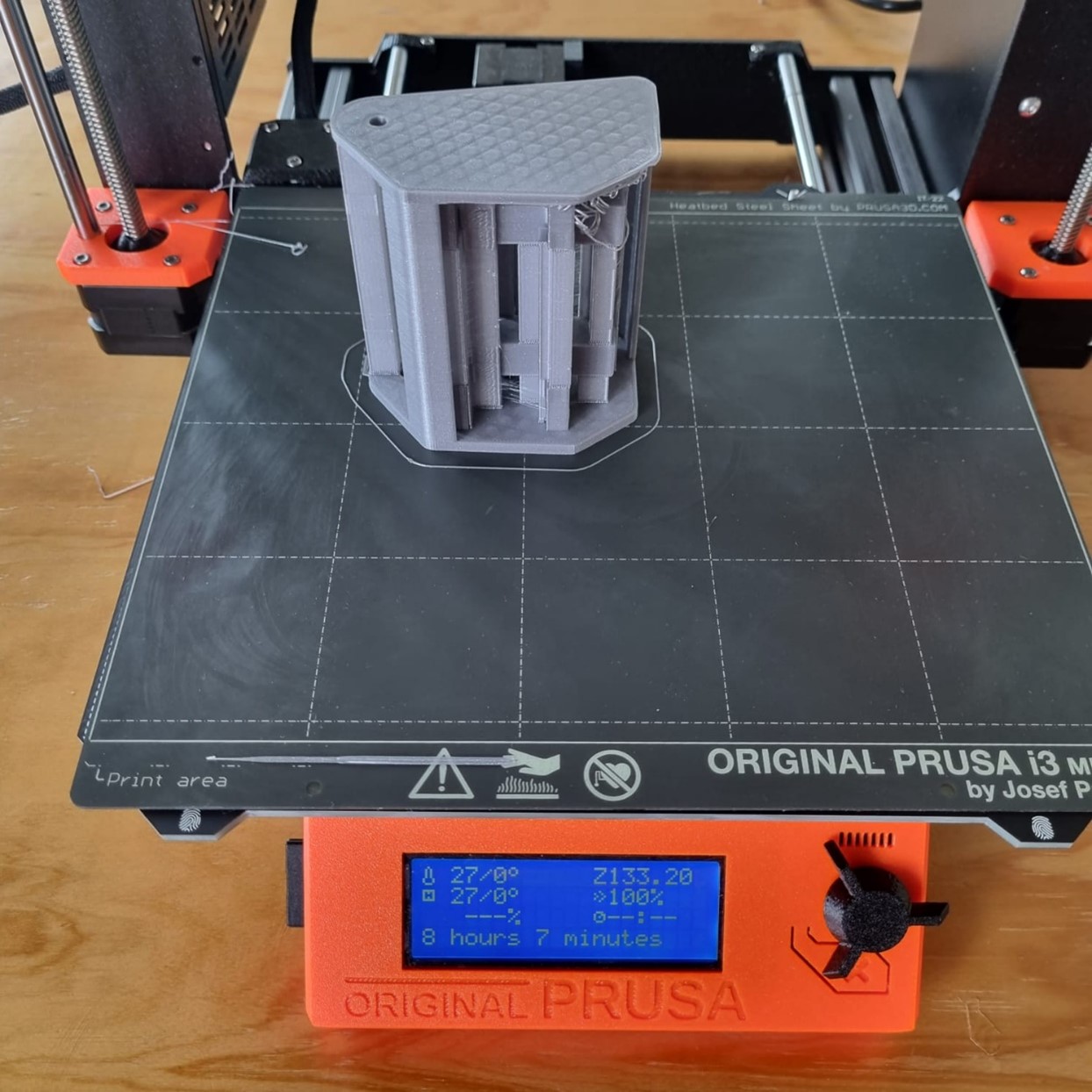
3D Design
3D Printing
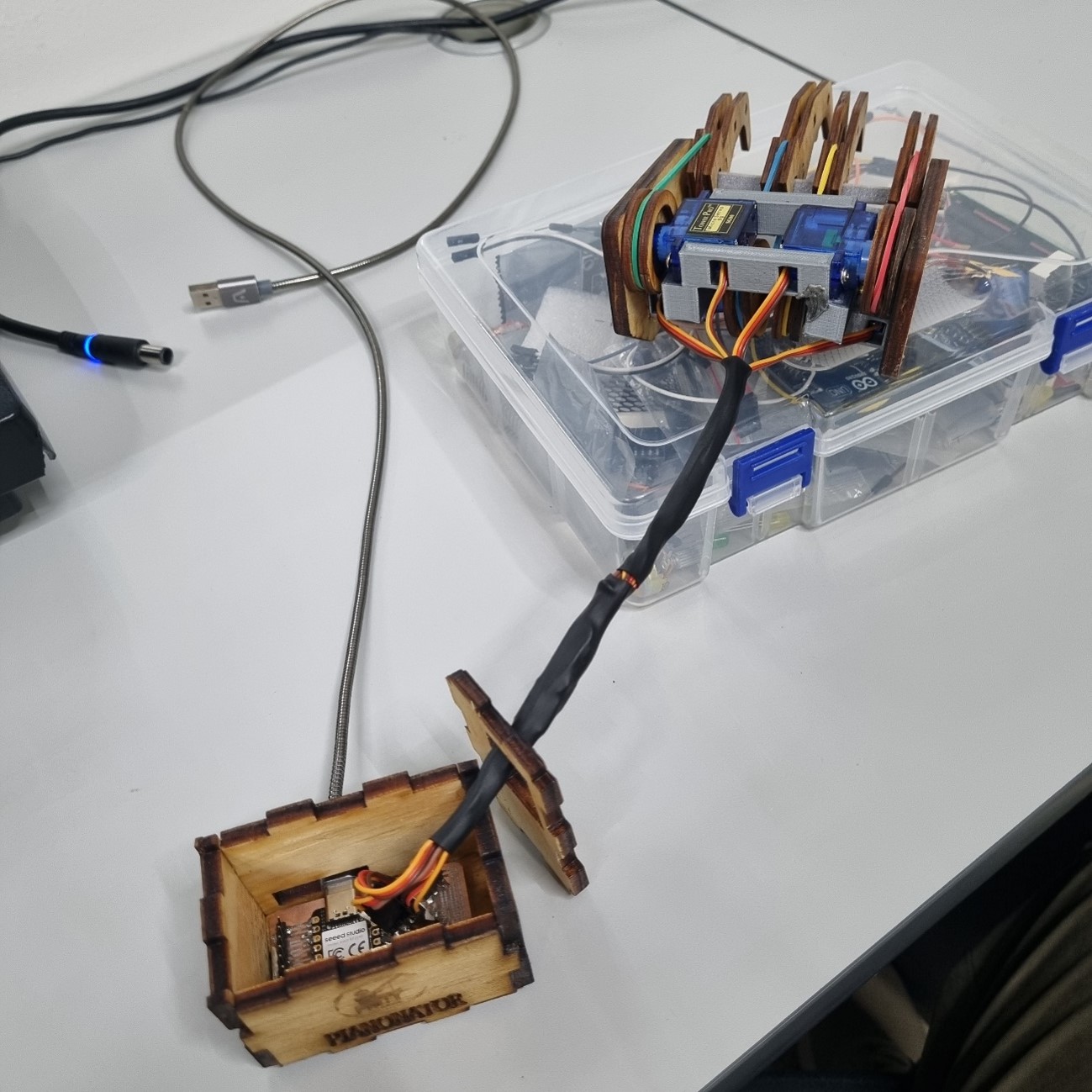
System Integration

A boton starts the pianonator
Test
Final Project - Pianonator

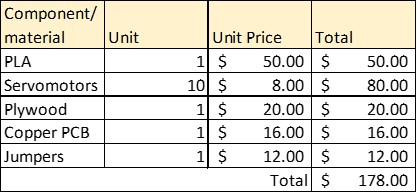
Bill of Materials
Slide
video

This work is under Licencia Creative Commons Atribución-NoComercial 4.0 Internacional.
Here, you can download the :