Our society is revolving, annually we are discovering new composites, producing new microprocessor for new smartphones and computer, launching rockets to Moon or to locate a satellite on orbit but in medical researching there are few inventions or improvments. This project was made with an objetive: Support both, rehabilitators and patients, with their rehab programs.
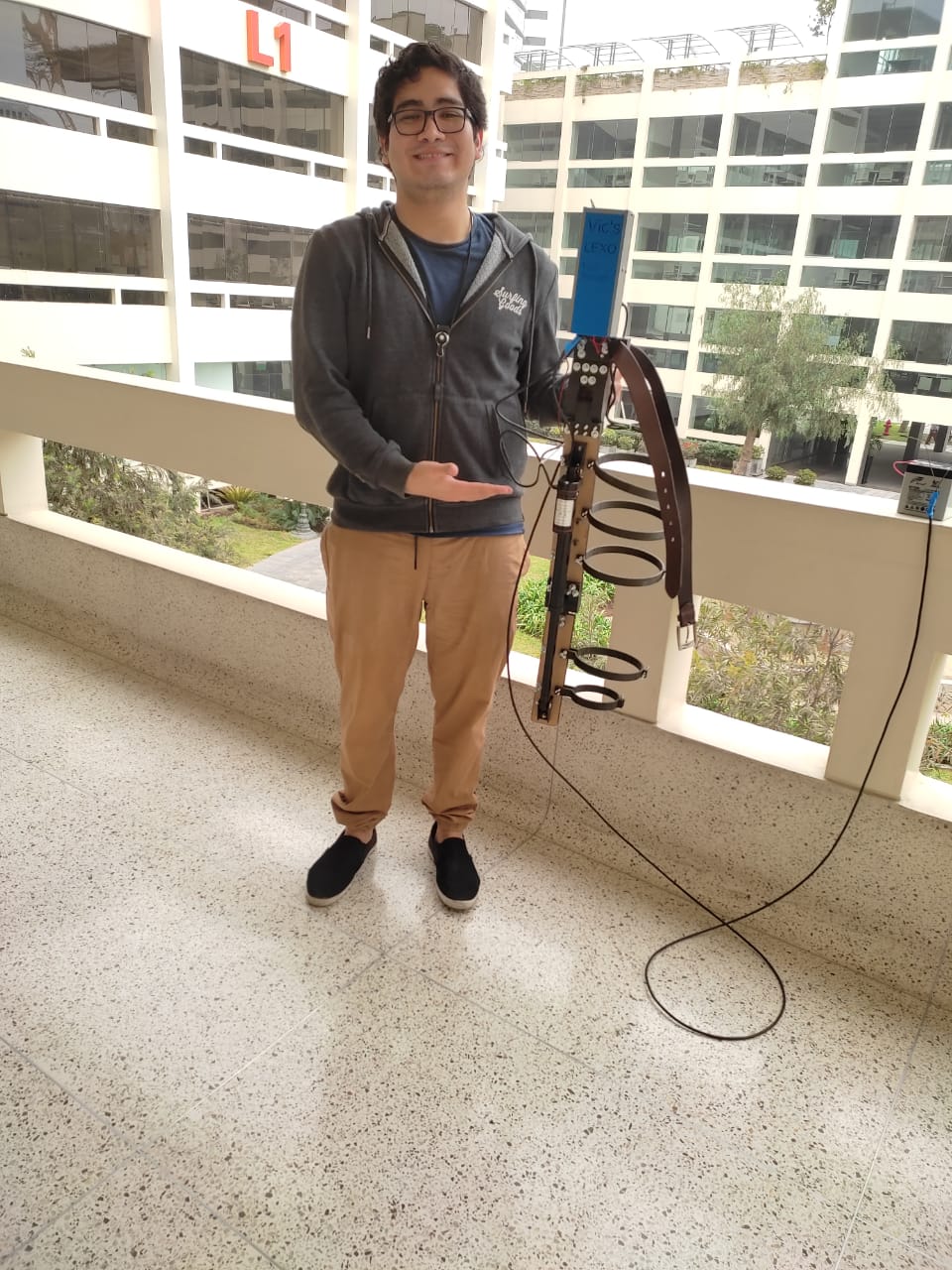
The main idea is that a patient can wear this machine while rehabilitator is controlling patient's leg movement.
Where The Idea comes from...
Honestly, my idea comes from a movie called "The Dark Knight Rises". There was a part when Bruce Wayne have to be back as Batman but he has been suffered a serious knee problem so he uses his new tool which is a device that is tied around his knee and recover his movility.
Sketches
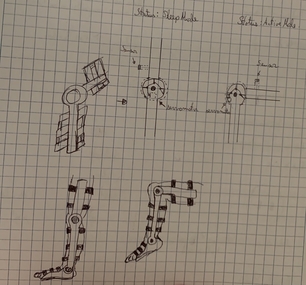
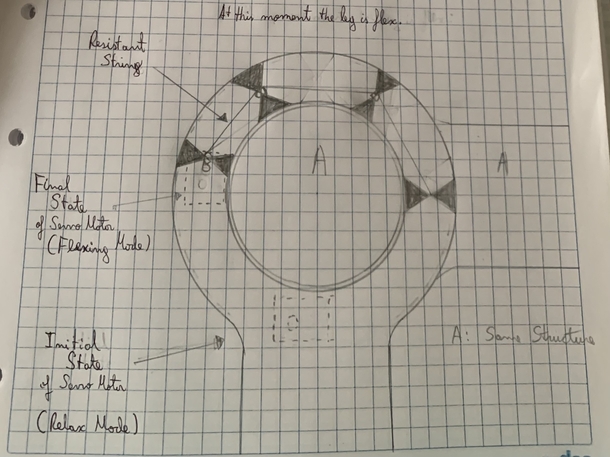
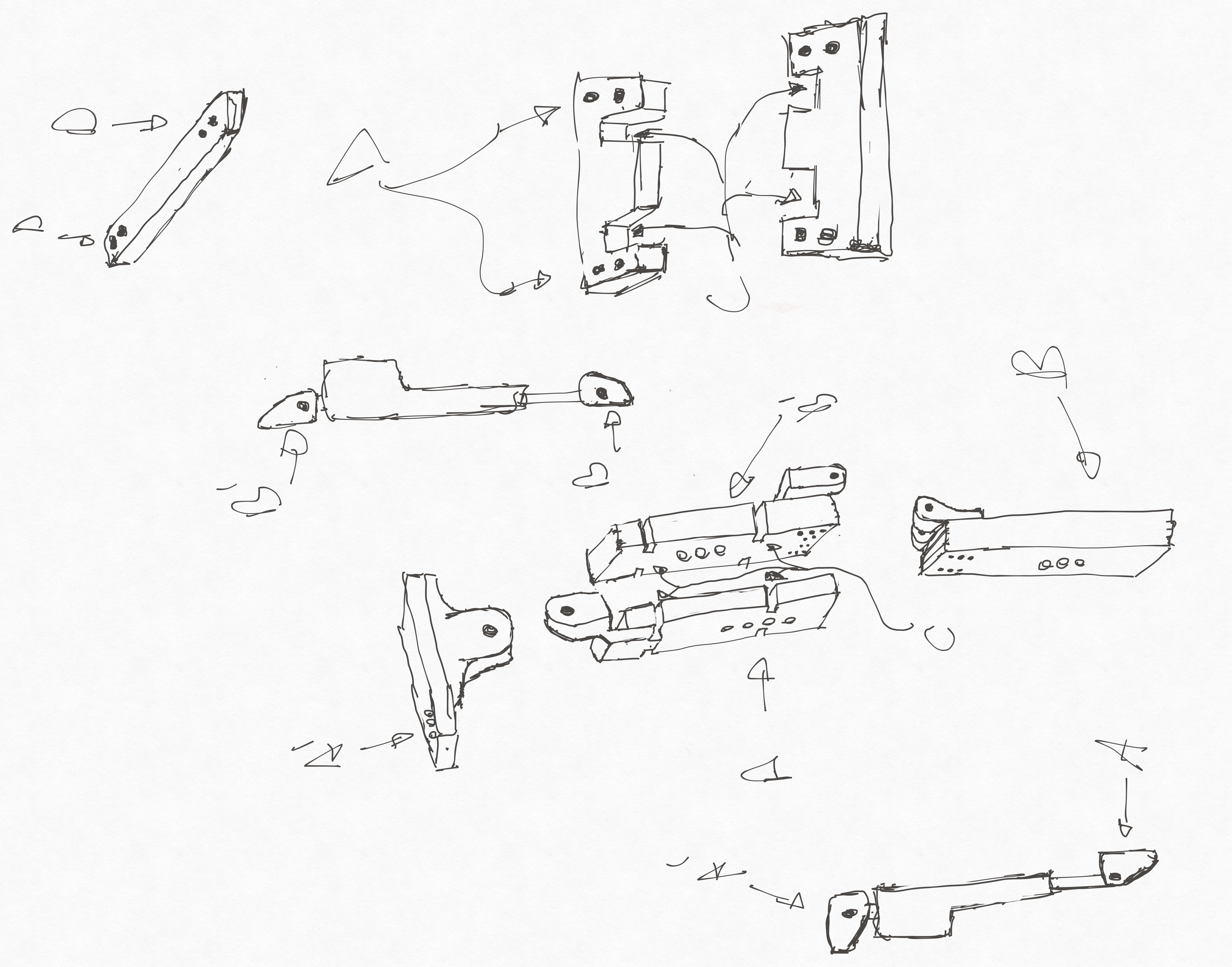
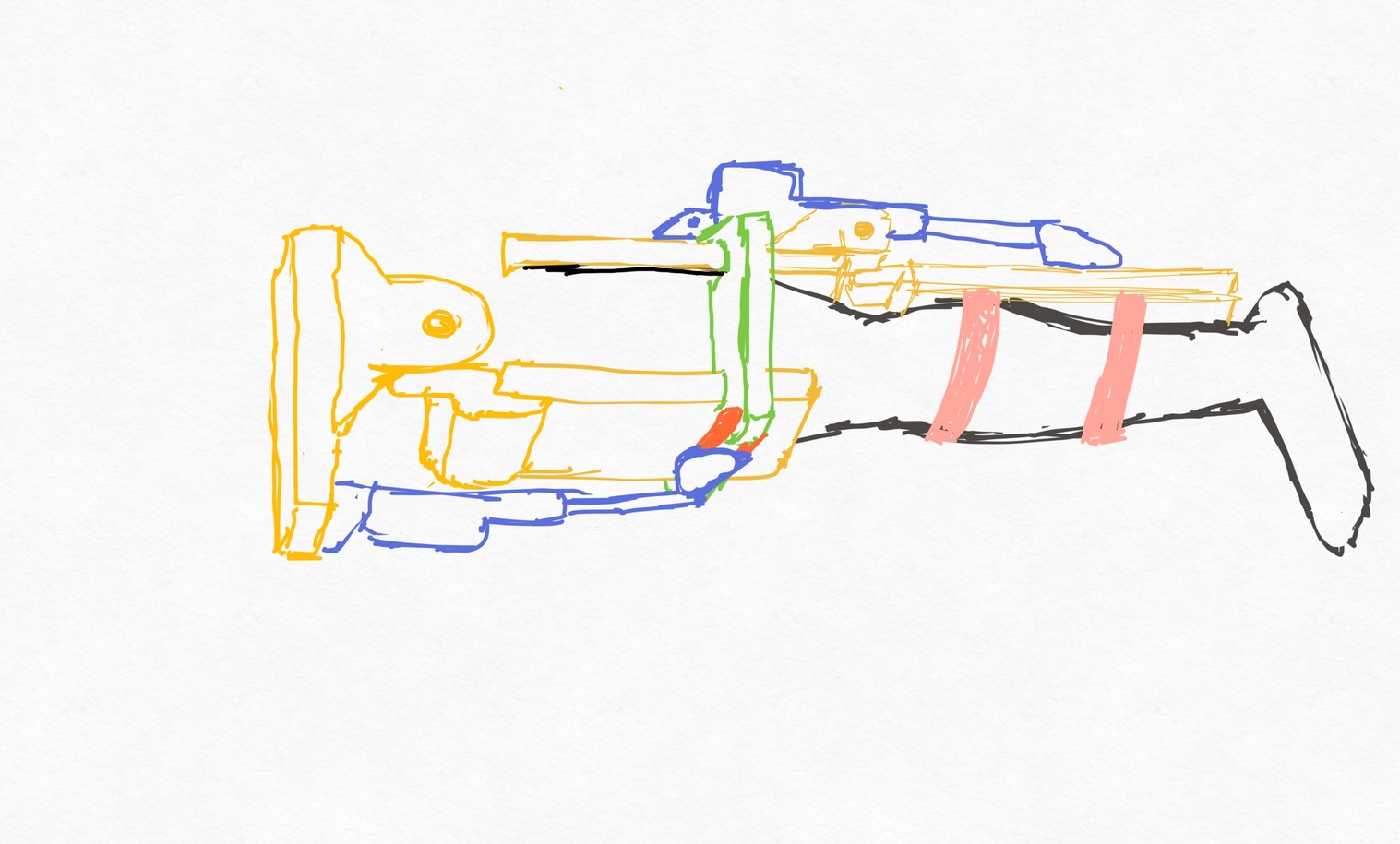
I started my idea with a couple of sketches.
Then I changed my main idea based on materials and usefull mechanism that I am able to use.
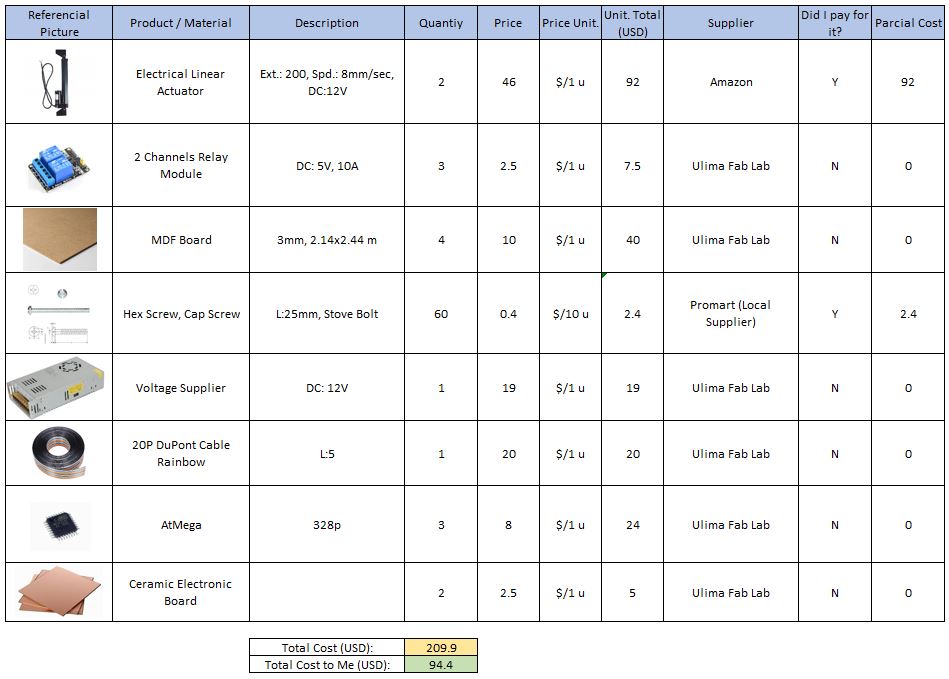
Having this I made a Bill Of Materials for my project.
3D Design
I used a lot Fusion 360, I do not considered myself an expert but I spend lot of my free time to finish my project final 3D design. I will show you the 2 parts and a compiling.
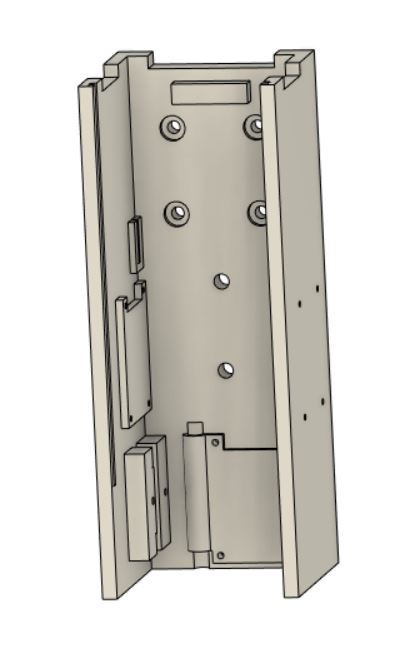
1st. What I called "MotherBox" and contains all electronic devices of my project.
1.1. The Cap
1.2. The Top
1.3. The Back Part
1.4. The MotherBox Case
The Mother Box
Note: You can use this window to hide some parts and see clearly all components of this segment.
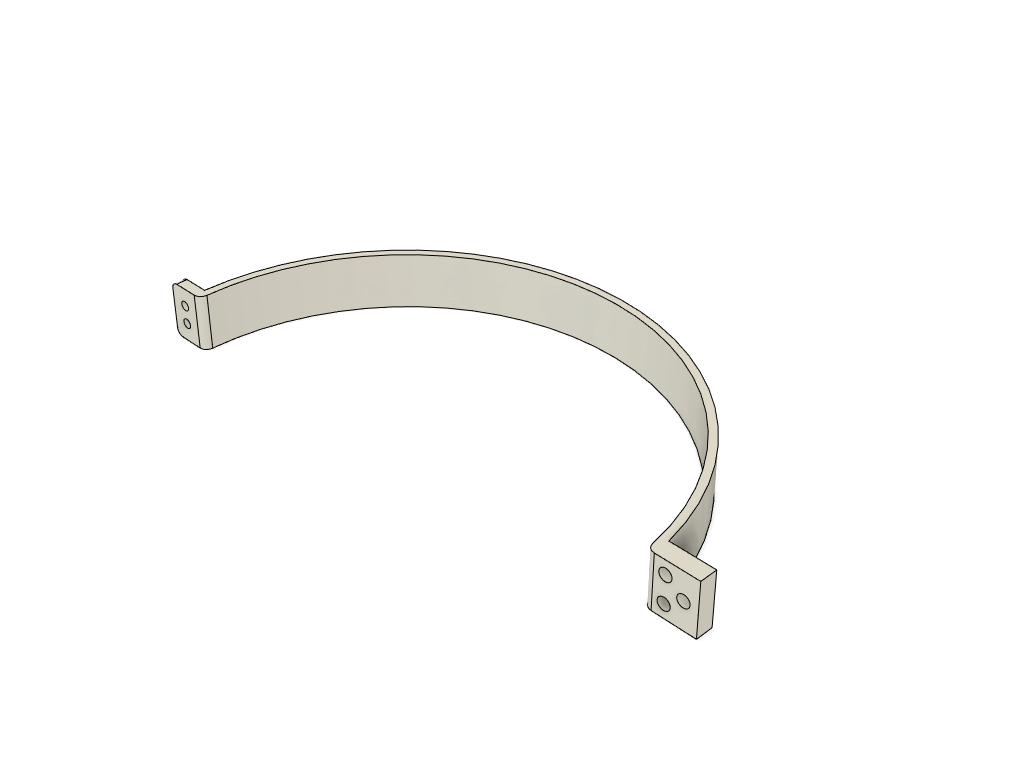
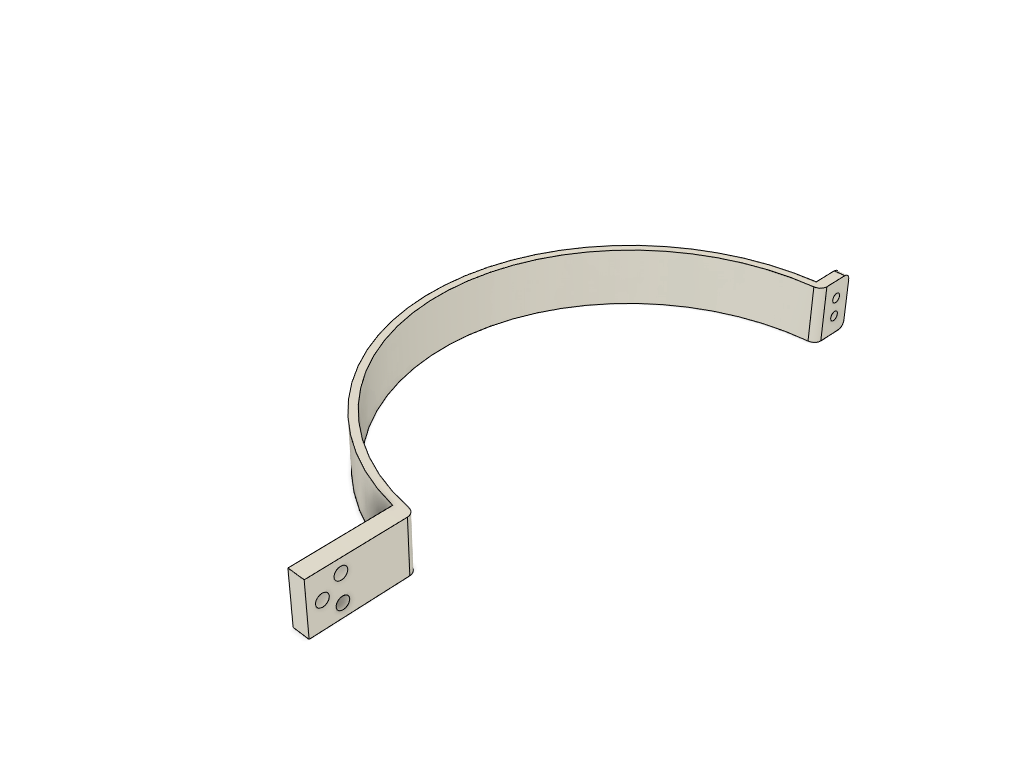
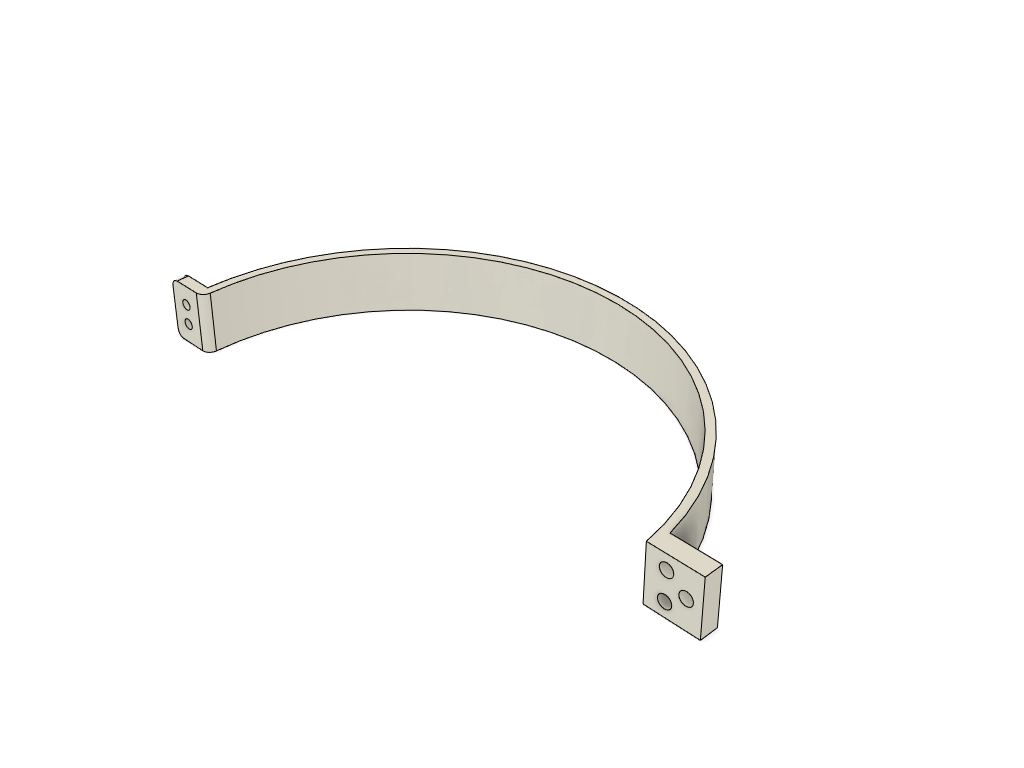
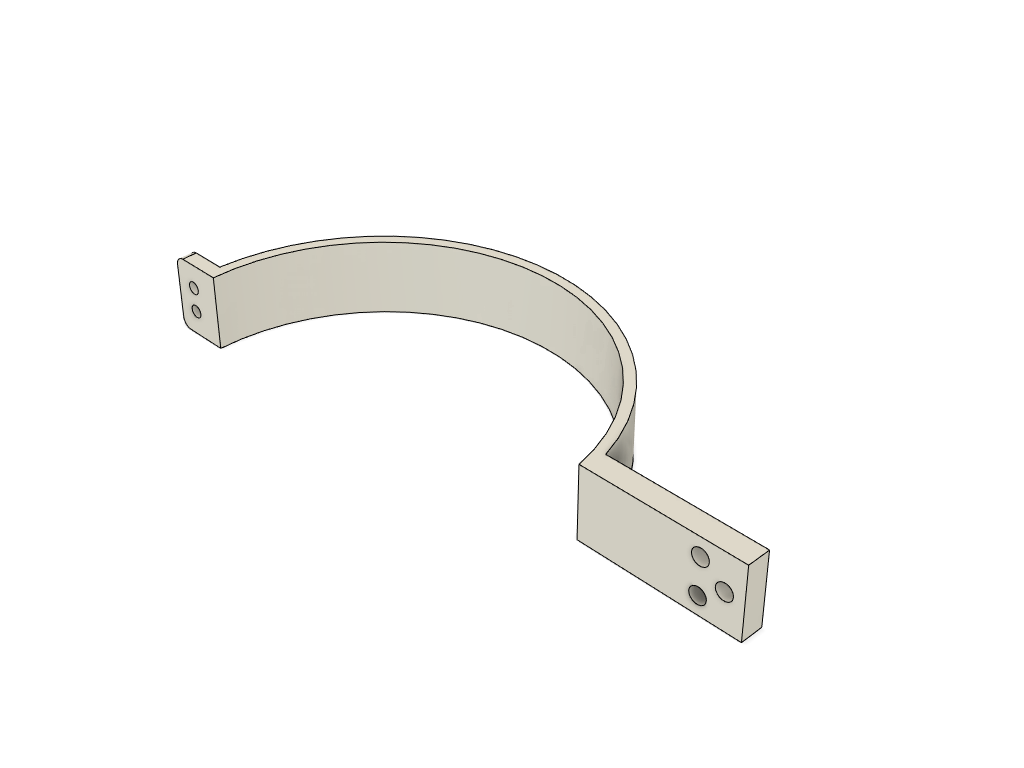
2nd. My Rings and Hinges which are part of my mechanical mecanism.
I designed the 5 rings which fit for my leg. You will see all from the upper to the bottom.
Upper Top Ring
Middle Top Ring
Bottom Top Ring
Upper Bottom Ring
Bottom Bottom Ring
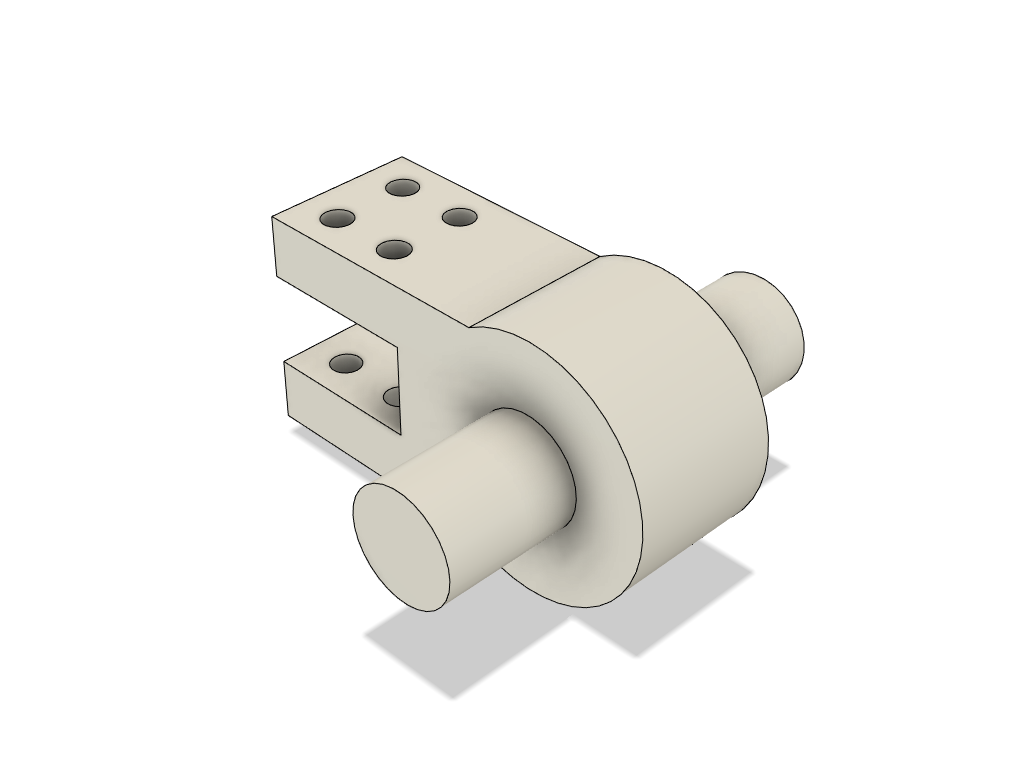
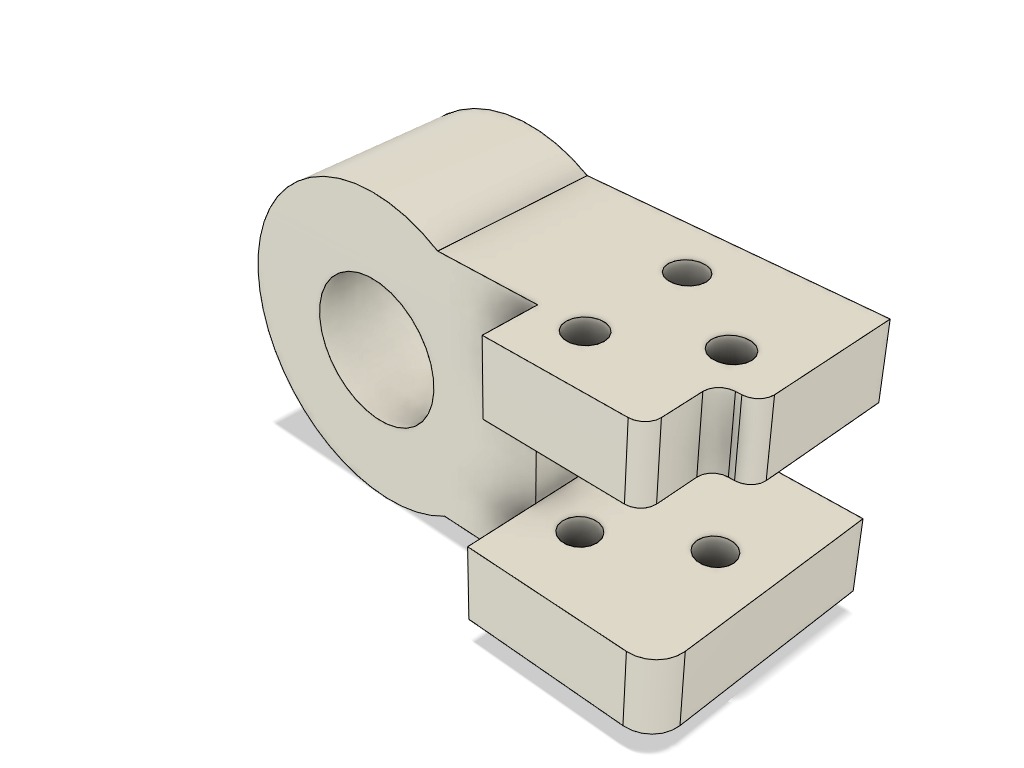
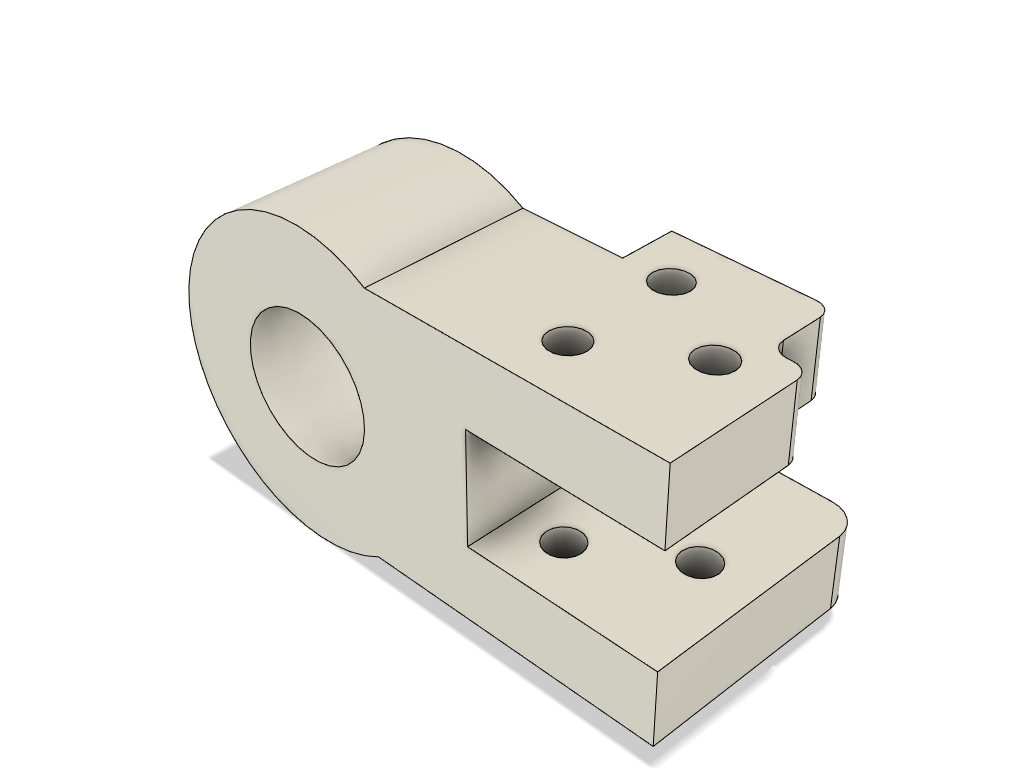
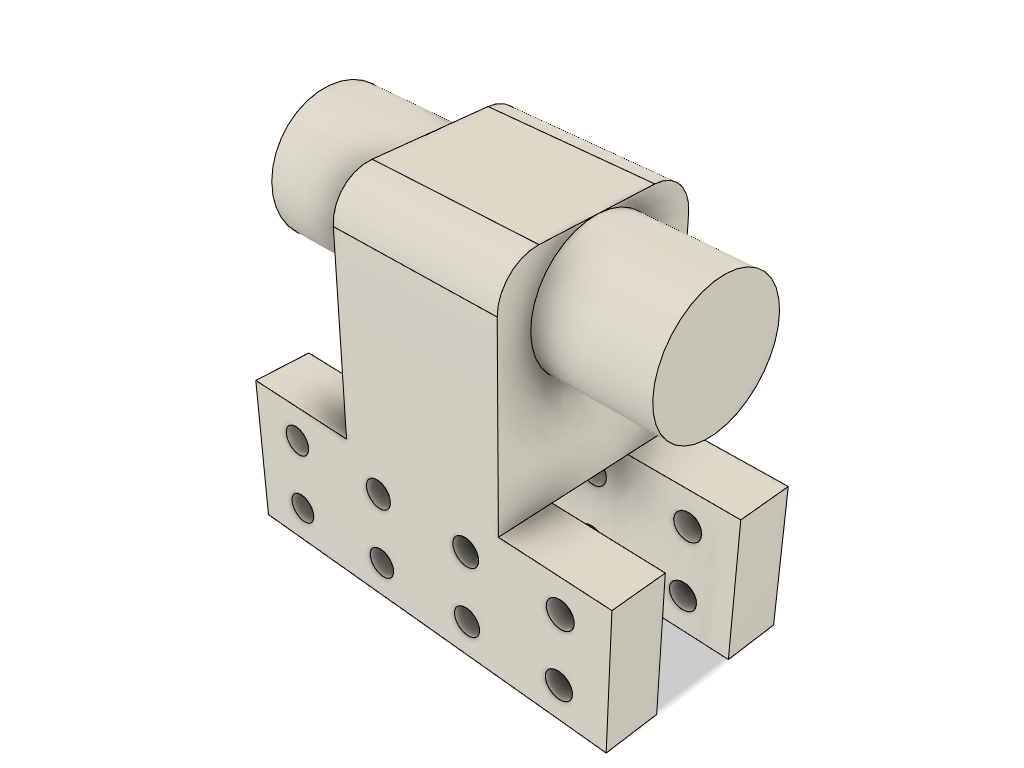
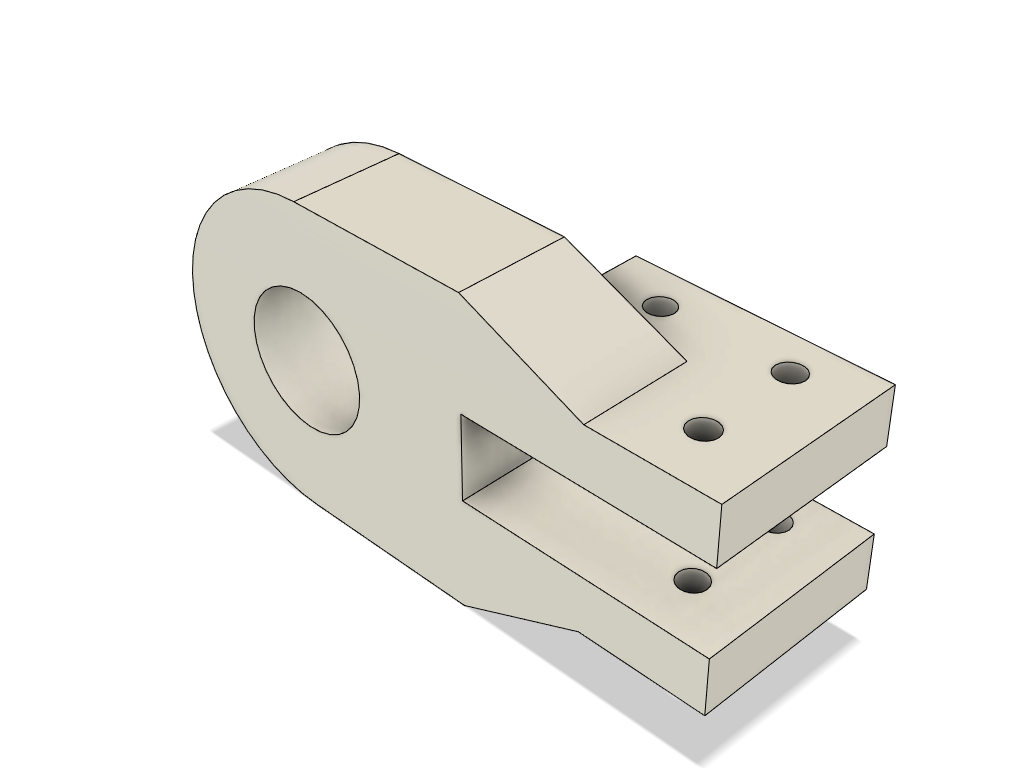
1st I will show you the Knee Hinges
Male Hinge
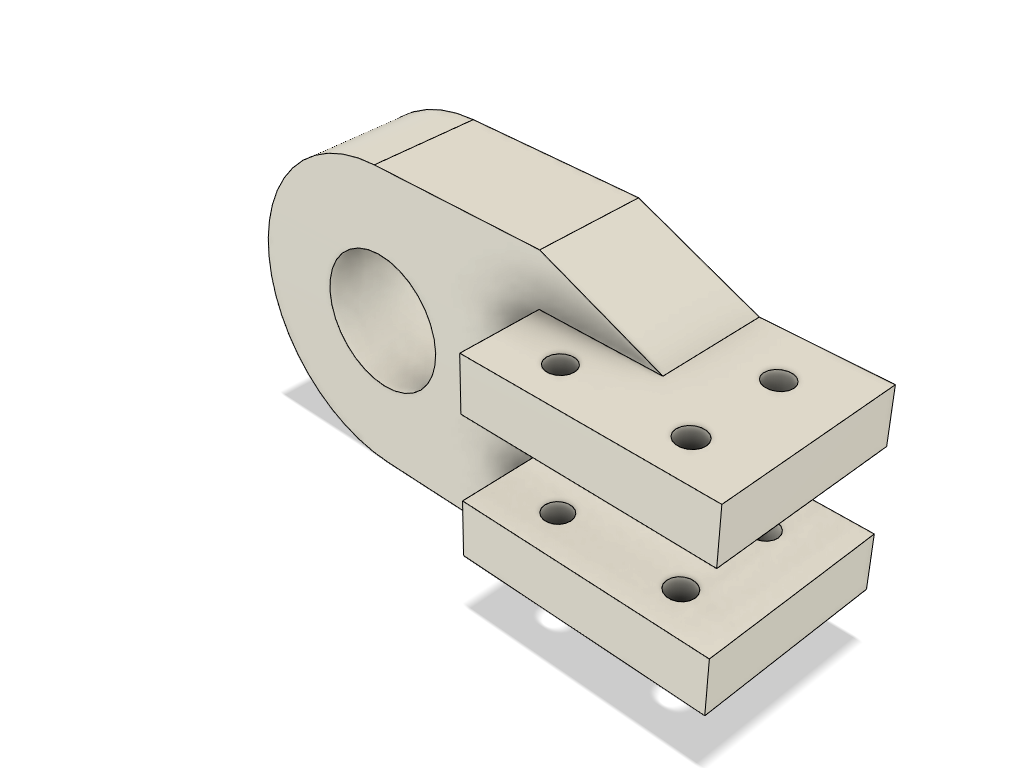
Female Right Side Hinge
Female Left Side Hinge
Now the Hip hinges
Hip Male Hinge
Hip Female Right Side Hinge
Hip Female Left Side Hinge
Finally the Assembly
The compiling which not differ form the others.
There is a good quality about Fusion 360 and Eagle, you can pass your PCB from 2D on Eagle to a 3D in Fusion. Let's take a look.
Vic's Lexo Atomic Megatronic
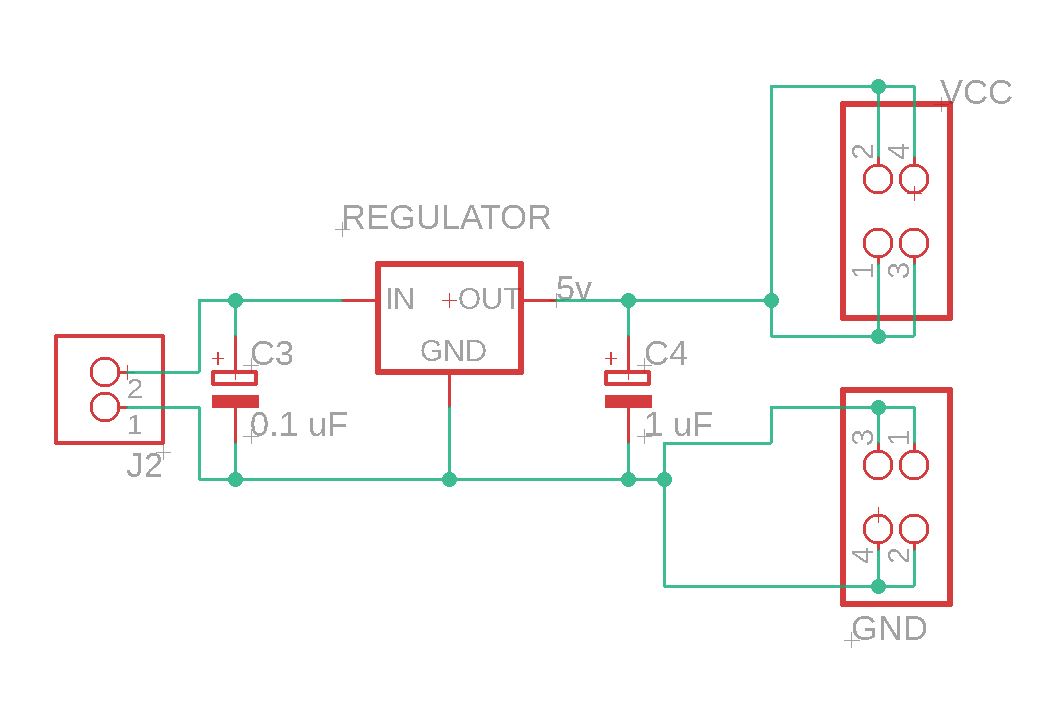
Final Regulator
Electronic Design and Production
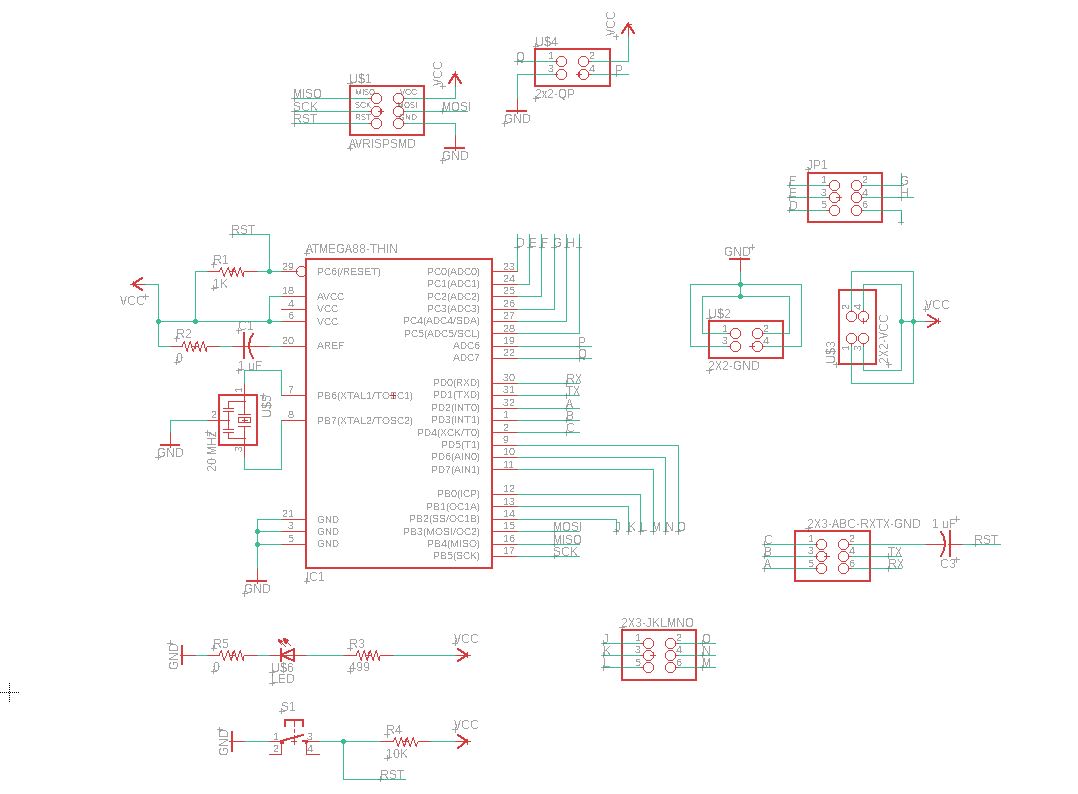
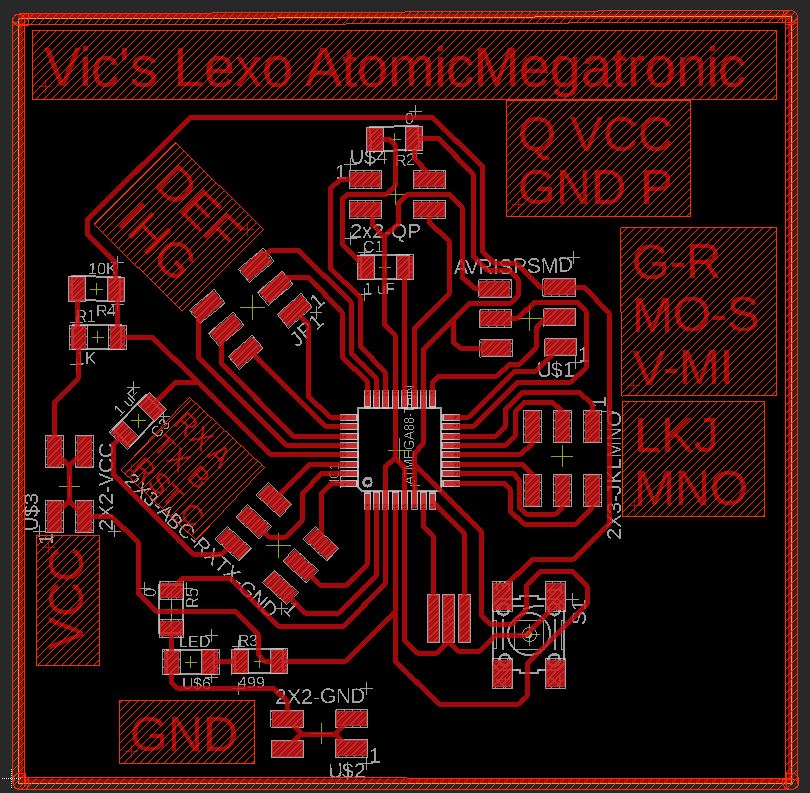
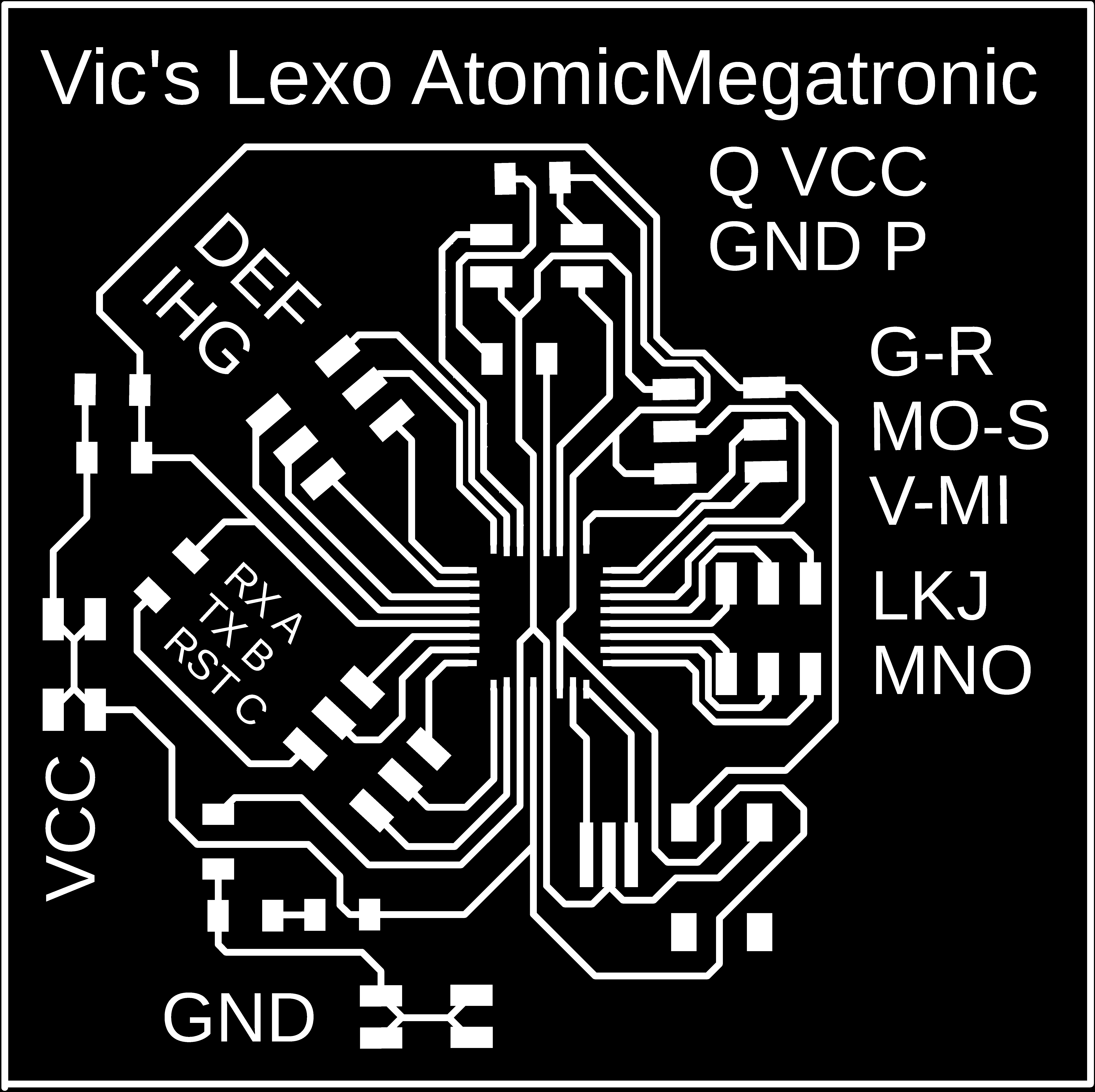
Here is my AtMega which was built by my preferences and utilities for this final project.
Vic's AtomicMegatronic Schematic
Vic's AtomicMegatronic Board
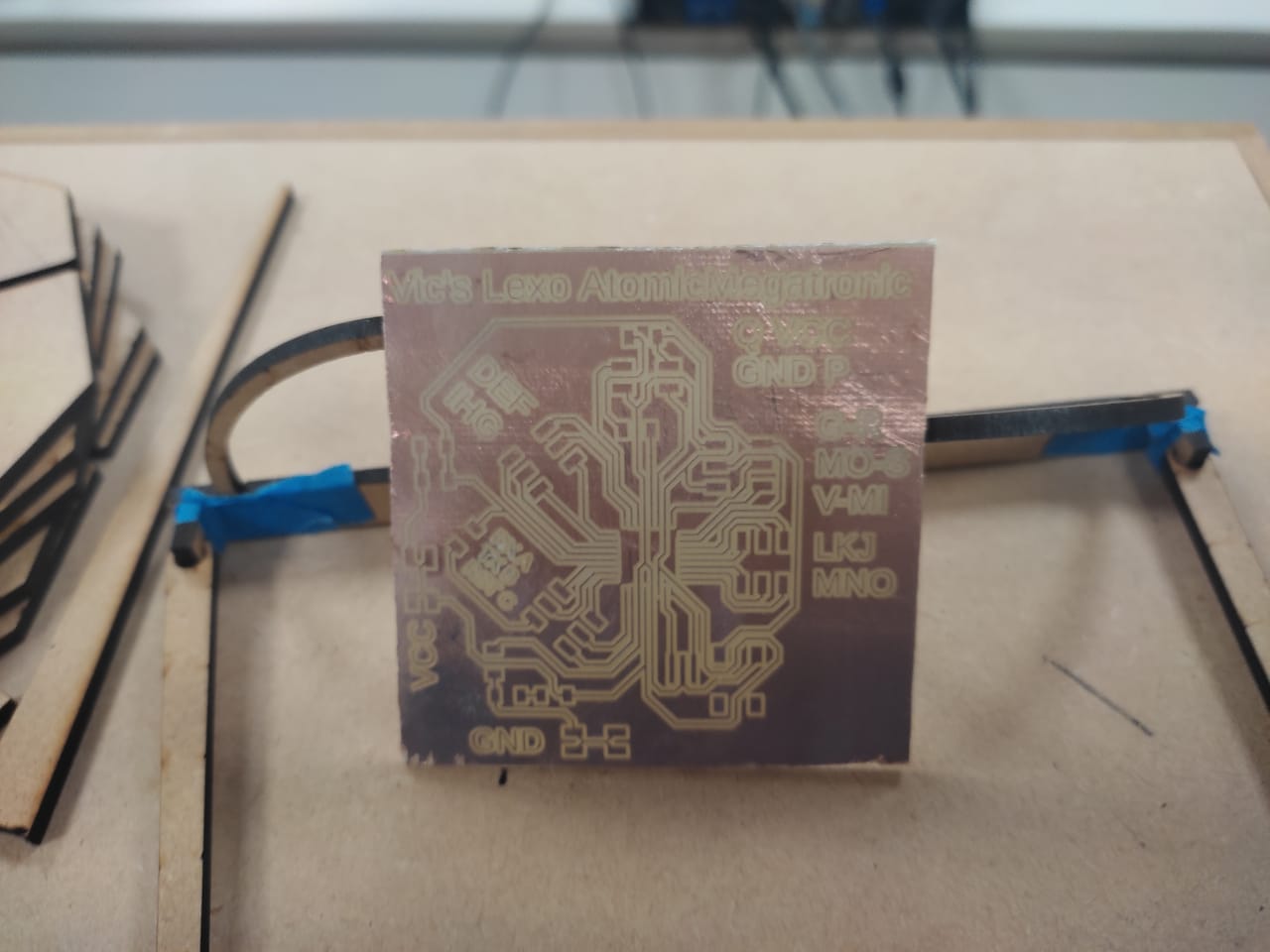
Vic's AtomicMegatronic Milled
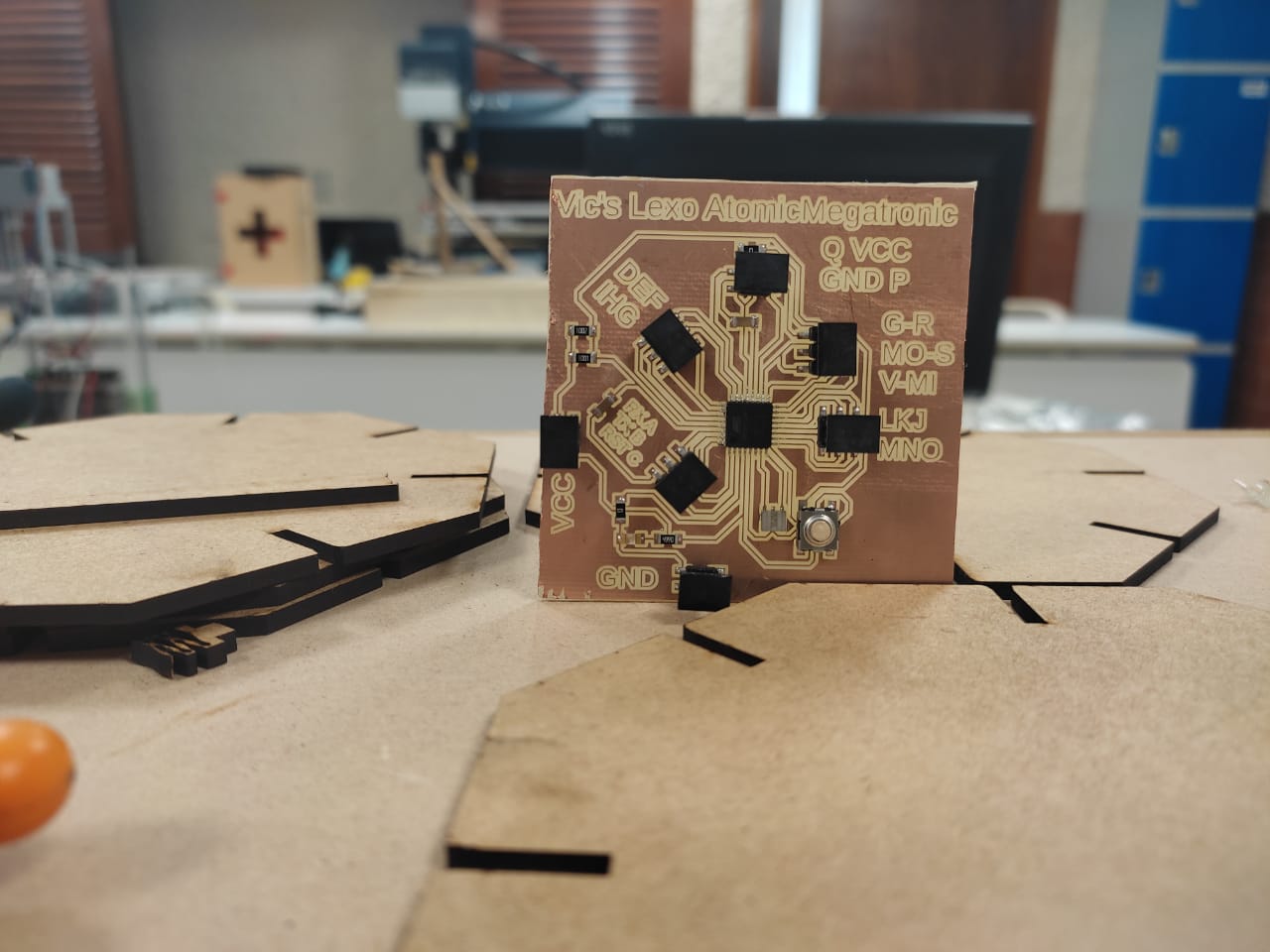
Vic's AtomicMegatronic Soldered
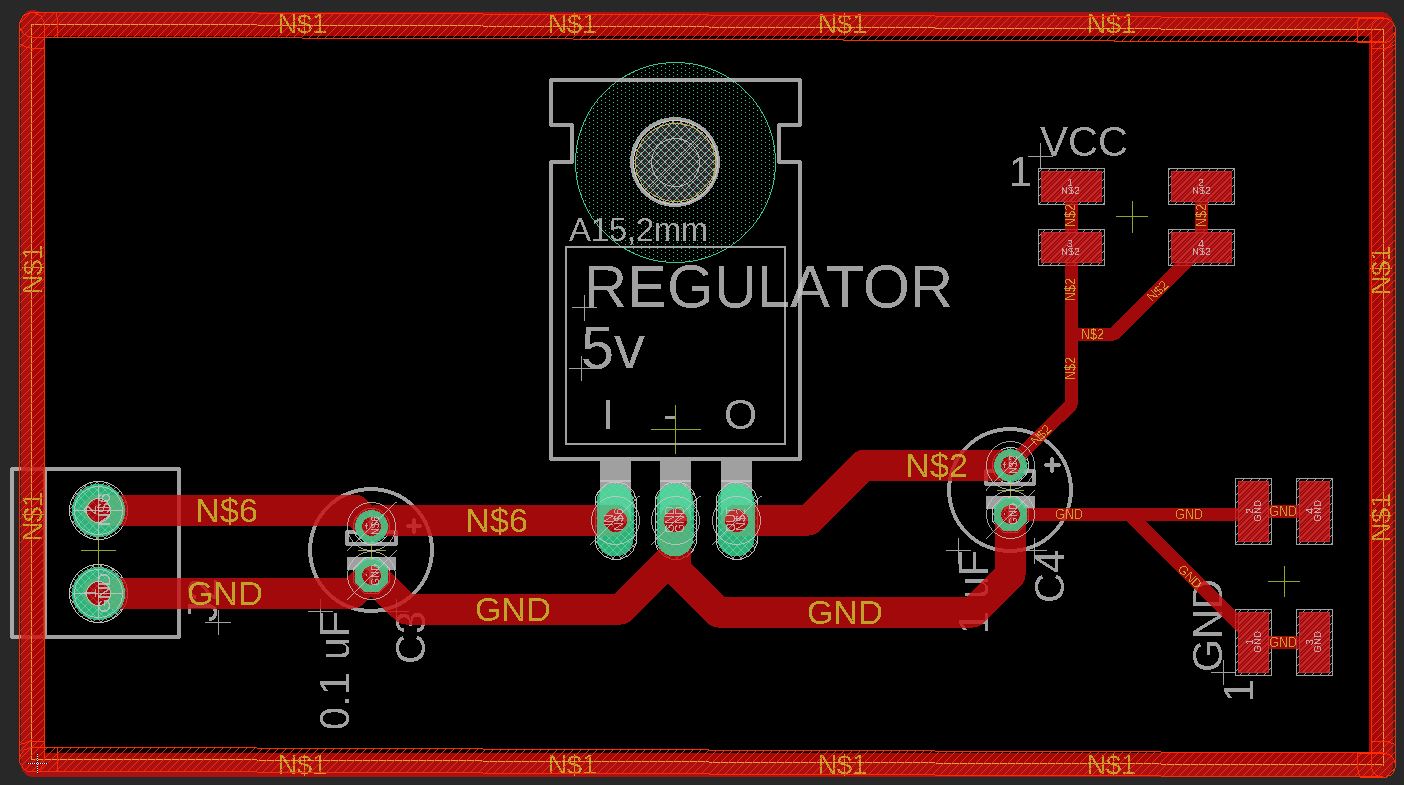
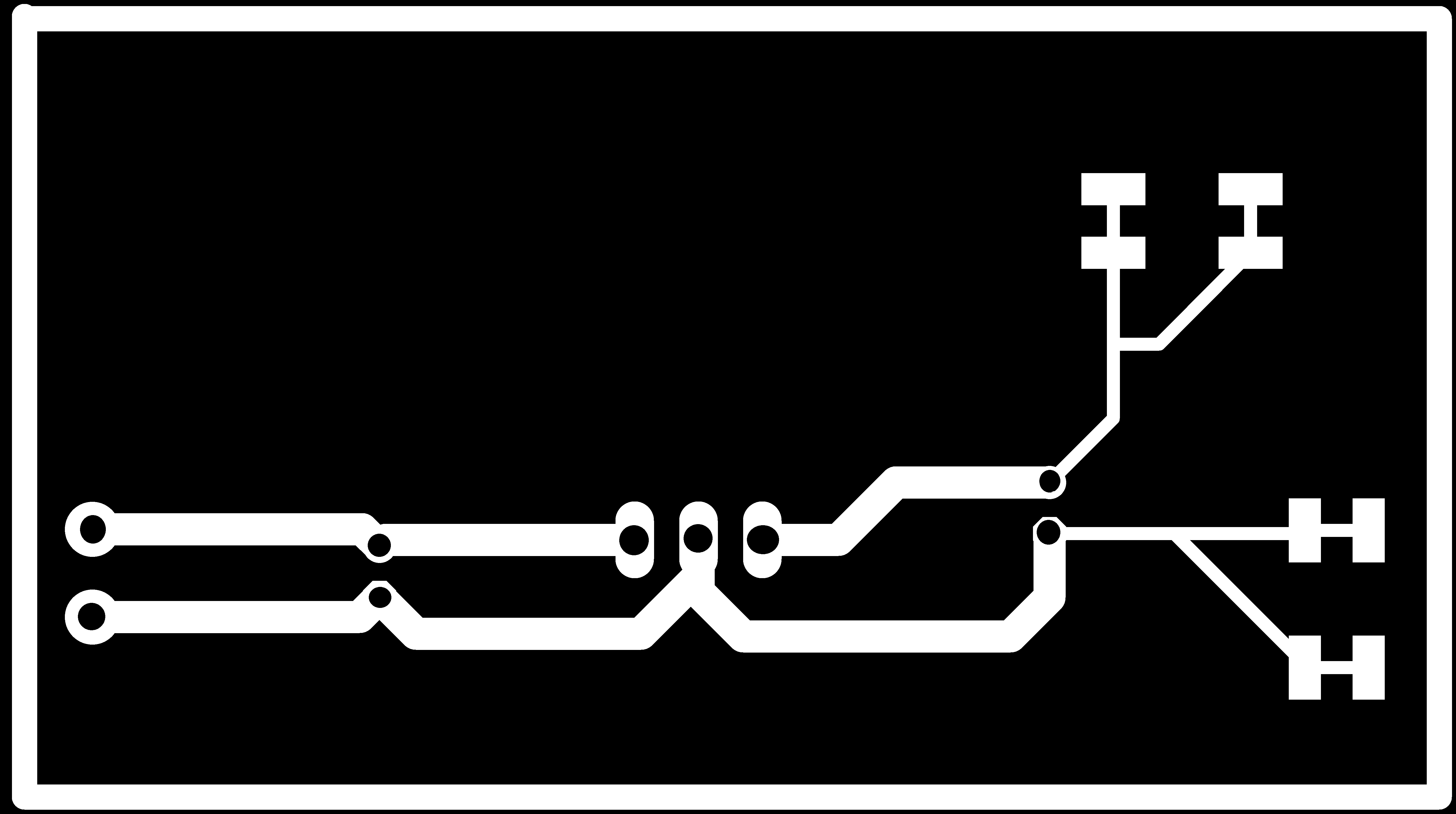
Regulator from 12v to 5v Schematic
Regulator from 12v to 5v Board
Rectifying holes
3D Printing
My project's 3D parts where printed in 2 machines: Makerbots and MarkForged
Makerbot: Here was printed my Switcher case and my MotherBox case.
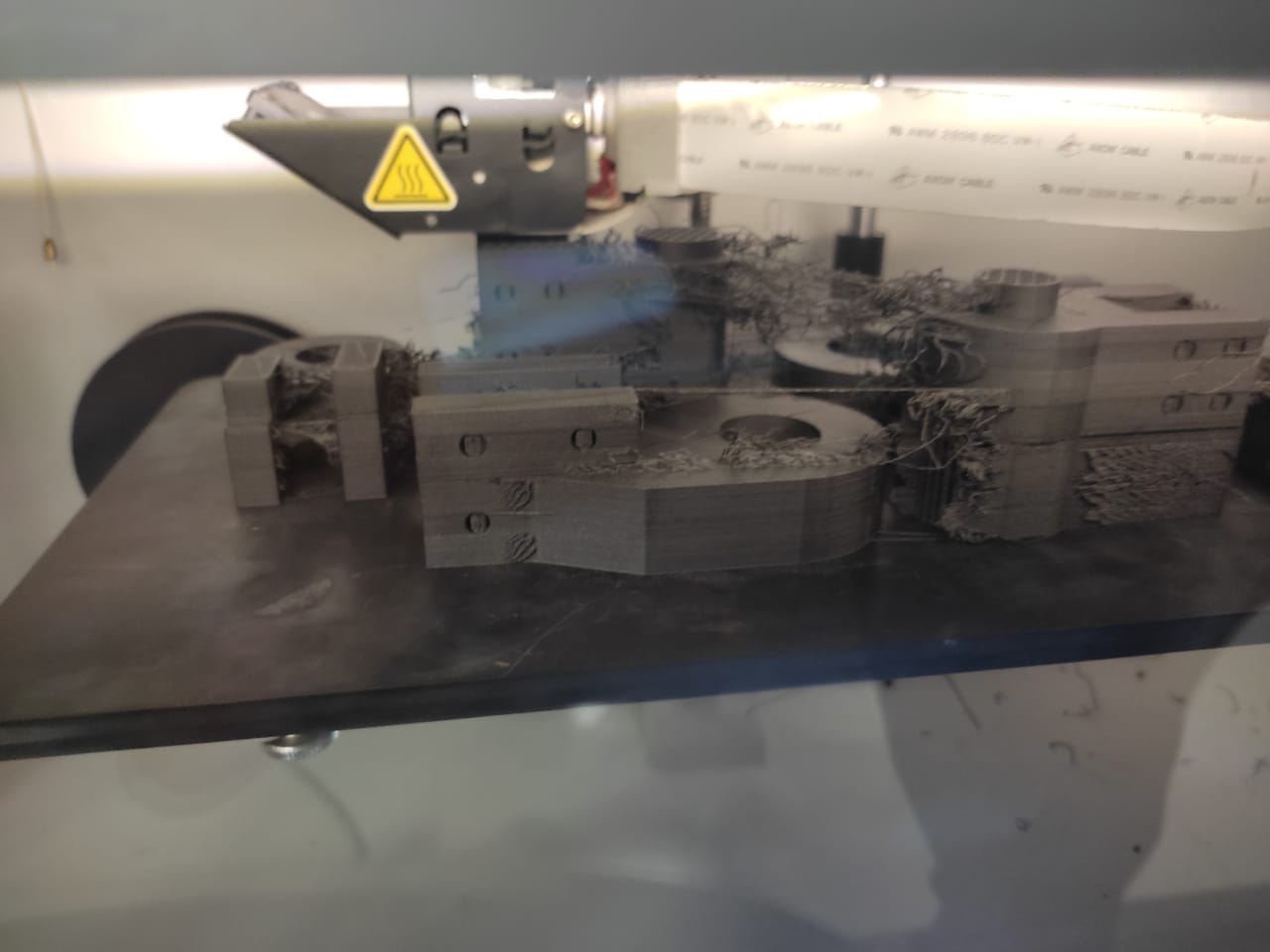
MarkForged: Here was printed the most important part of my project, for me, the Hinges which have to be strong and lightweight.
After this I had to clean and soft all surfaces of my Hinges and Rings. I also had to rectify all holes.
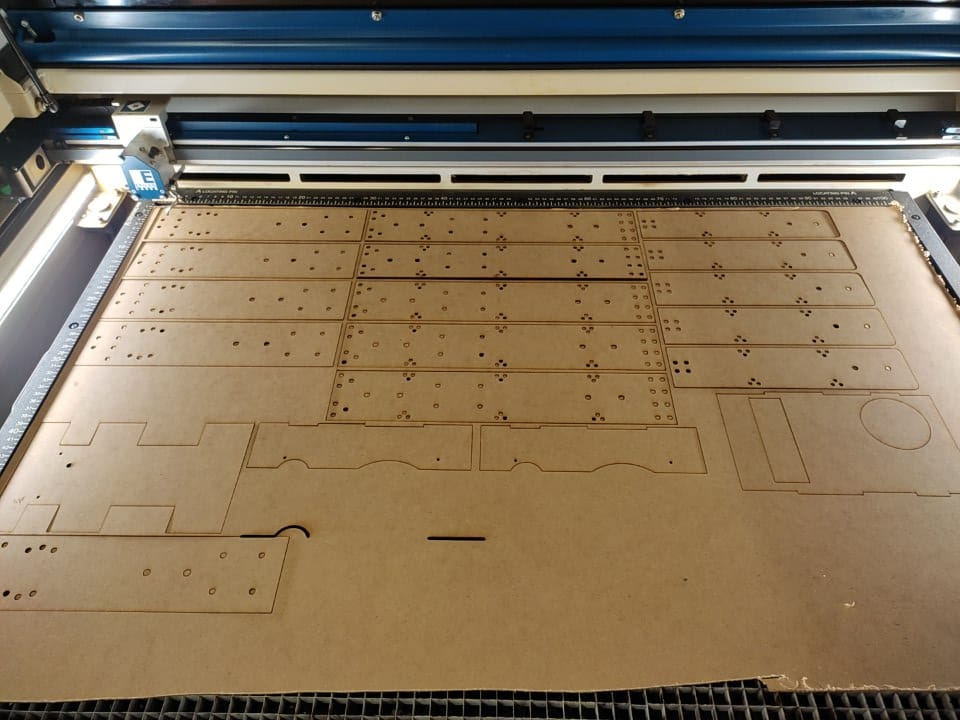
Laser Cut
I cut my MDF sheets in the Epilog Machine.
Note: I cut the case of my voltage supplier in the same process.
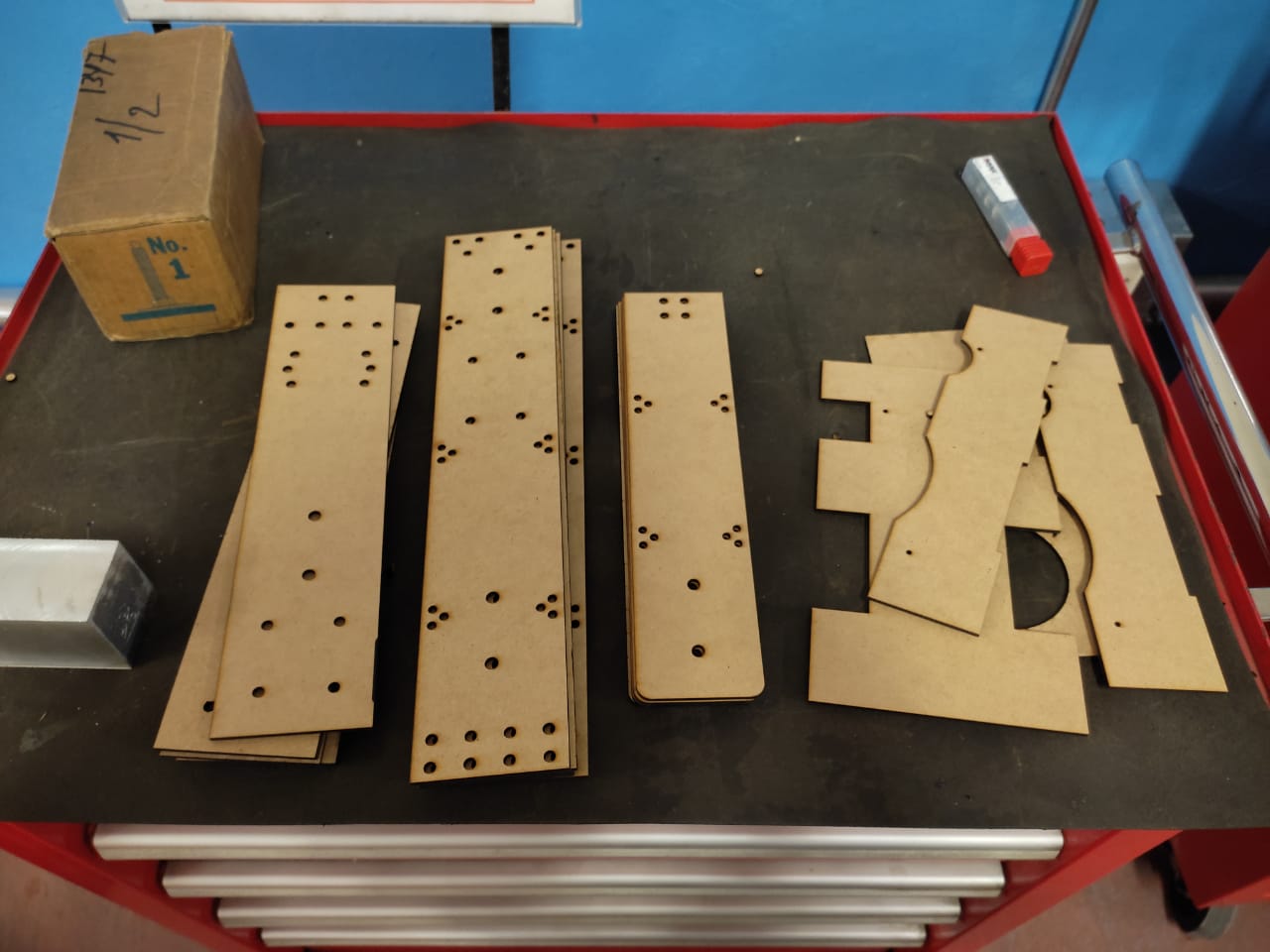
I finally had these.
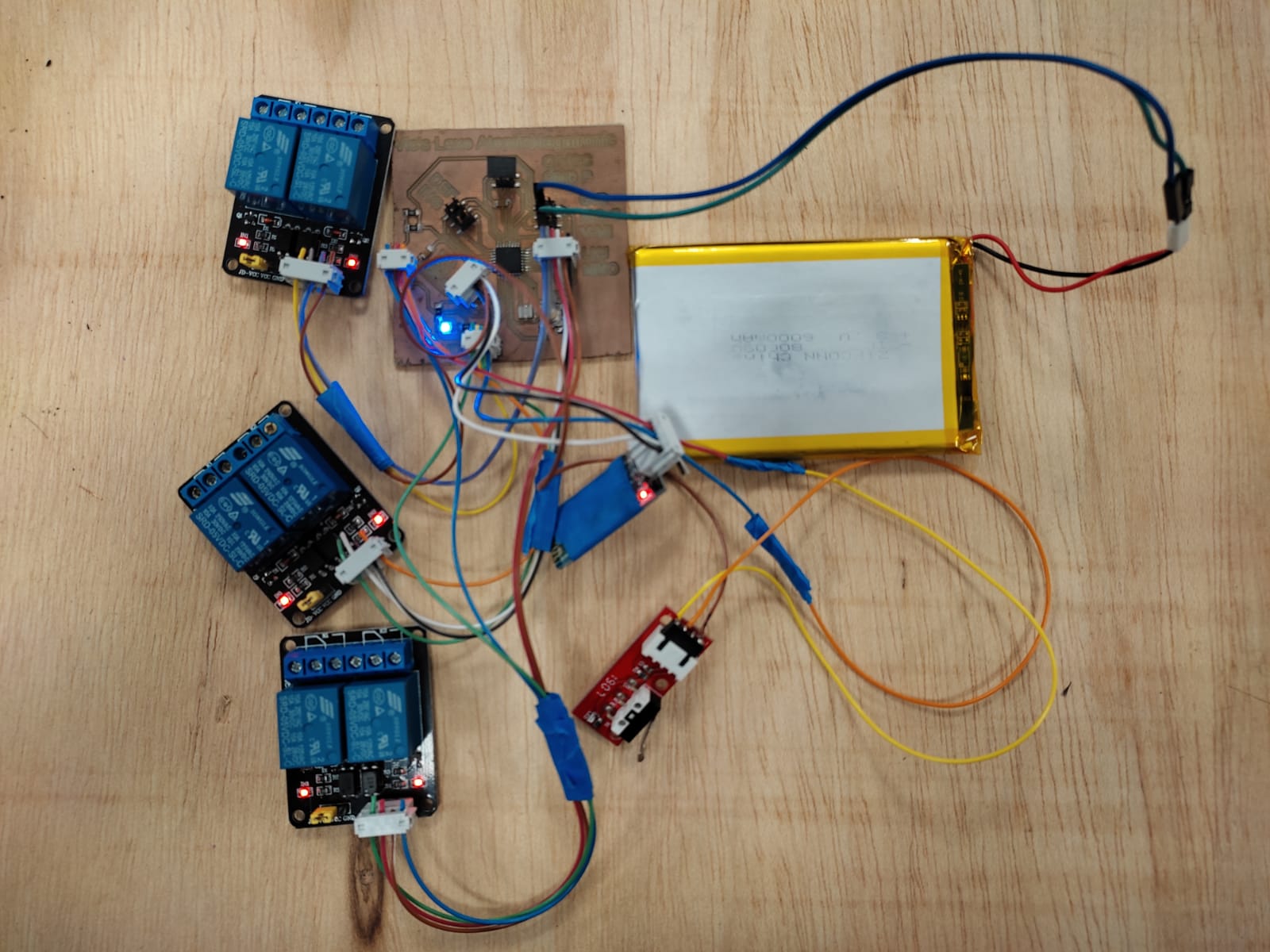
Integration and Electrical Connection
Here comes the integration of the electronical parts
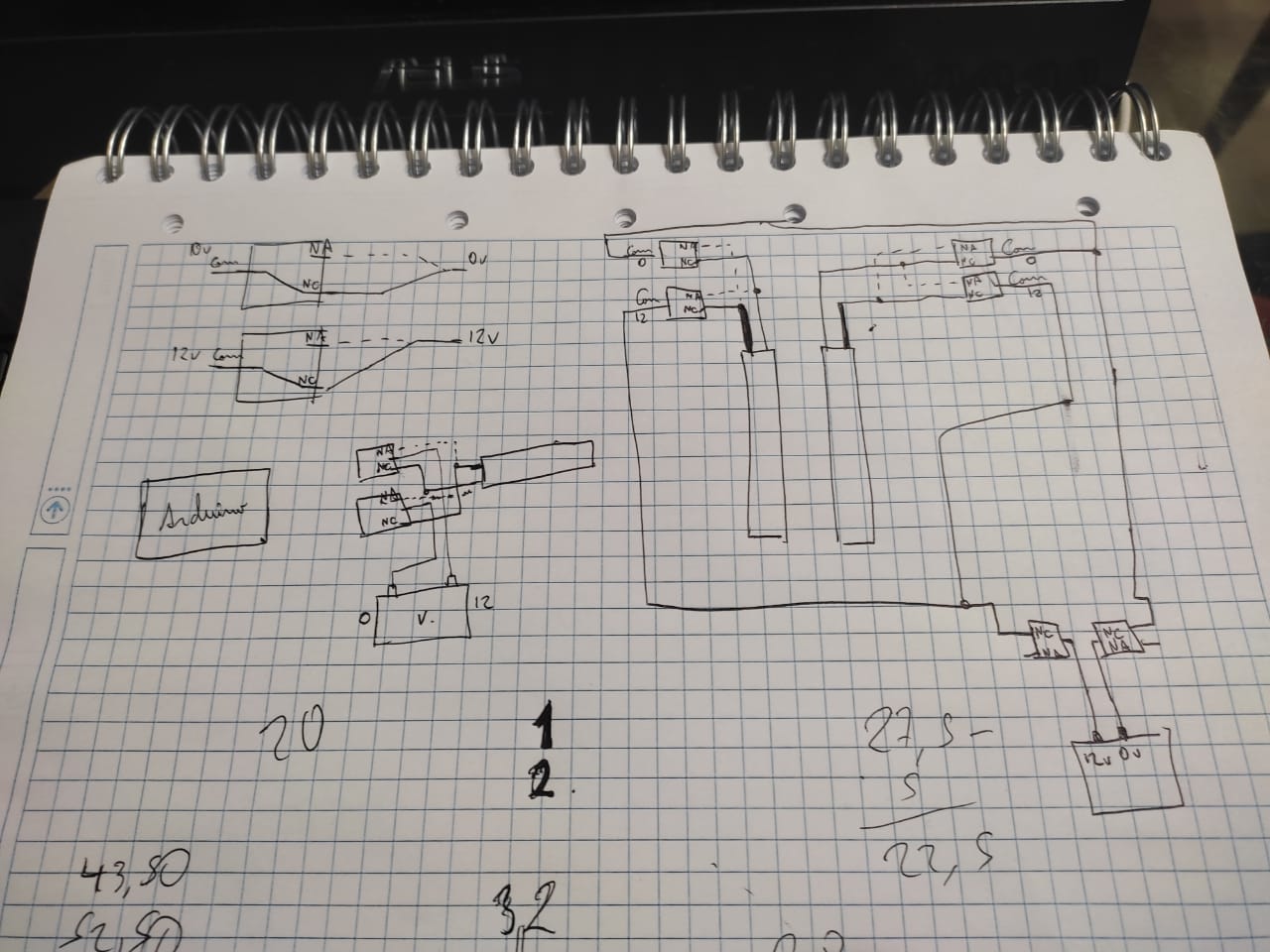
A picture which will describes the connection between the supplier and the Relays.
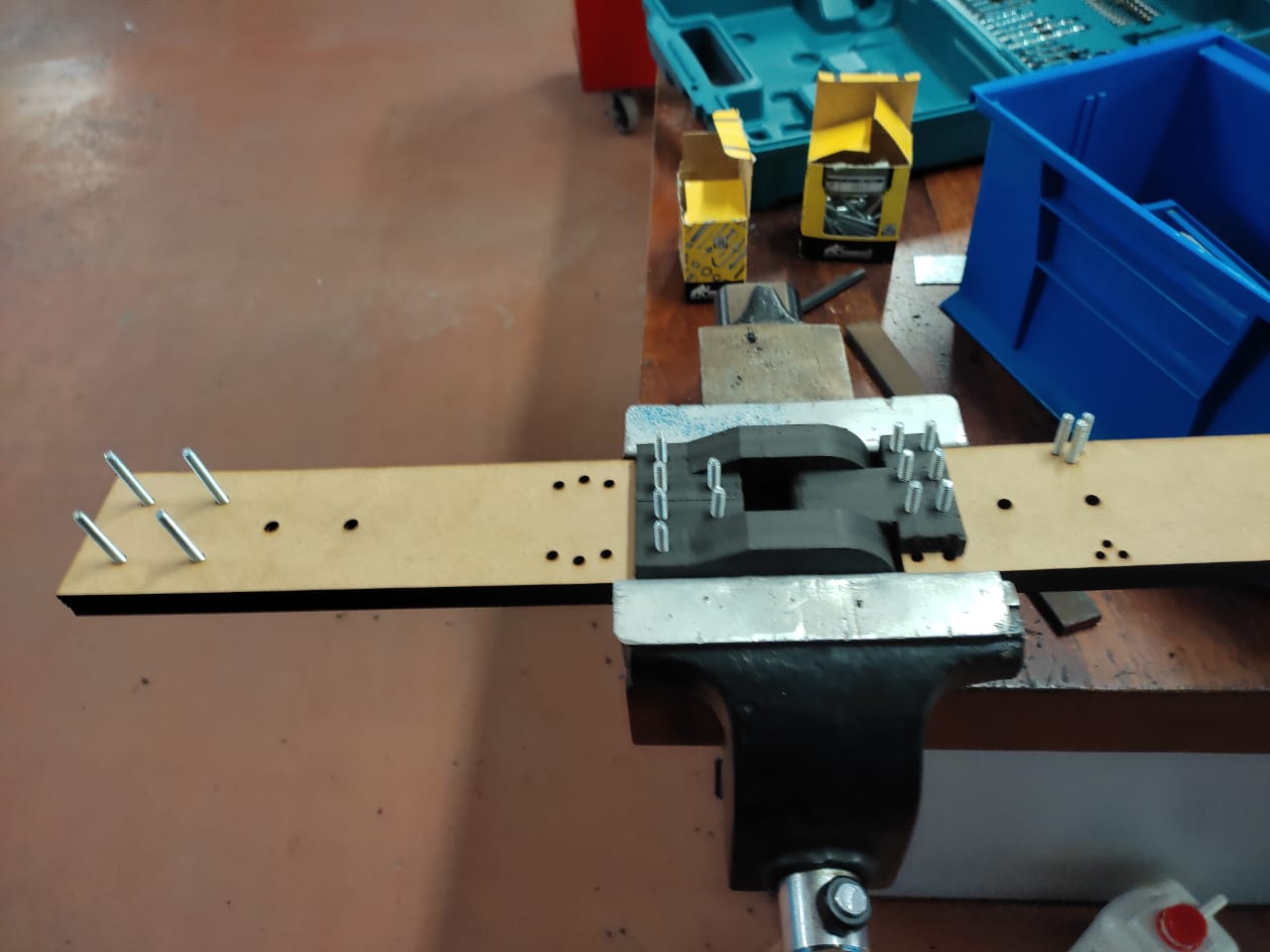
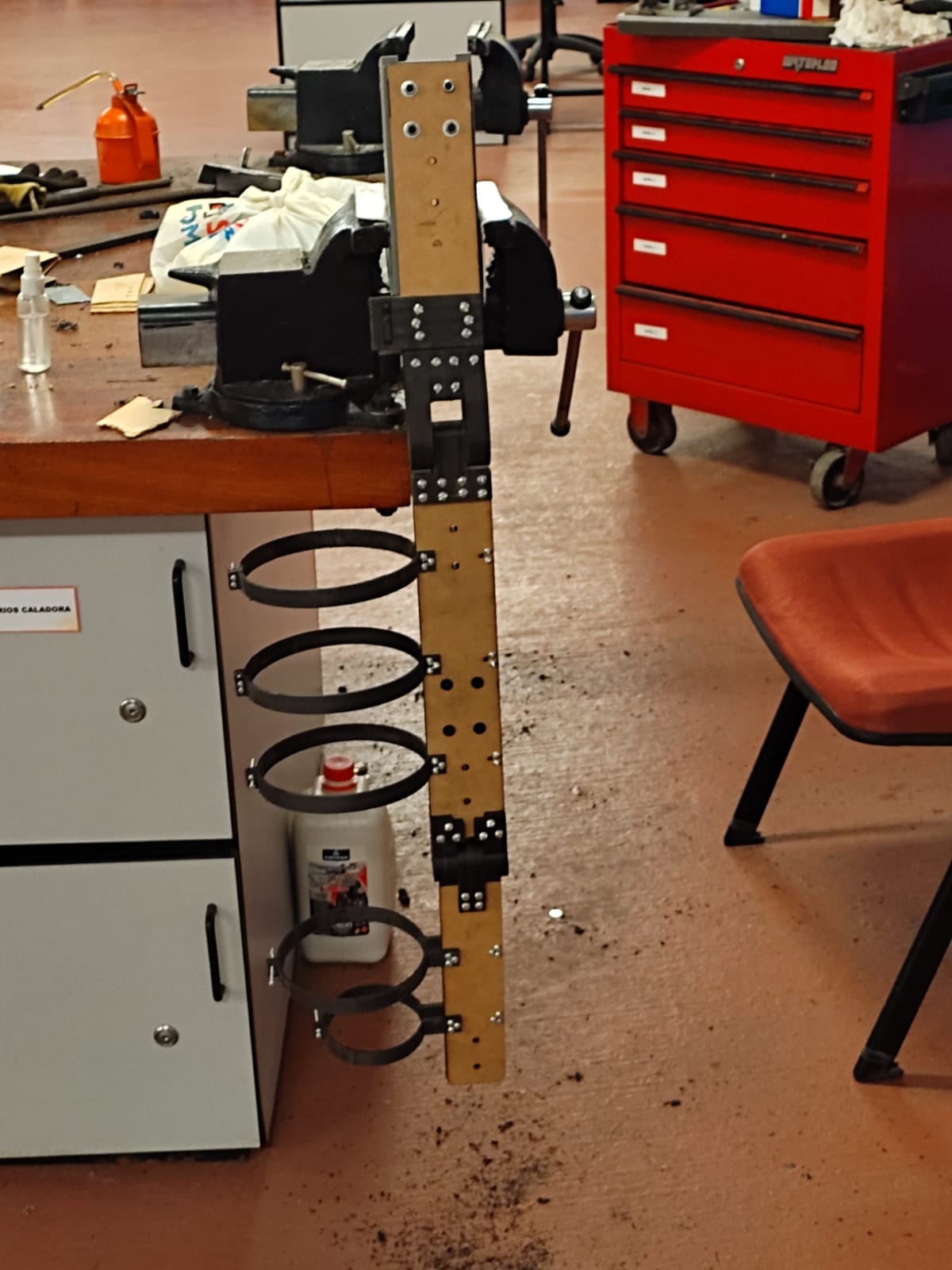
Assembly Time!!!
I started assemblying my MDF block with my Hinges using screws and top screws.
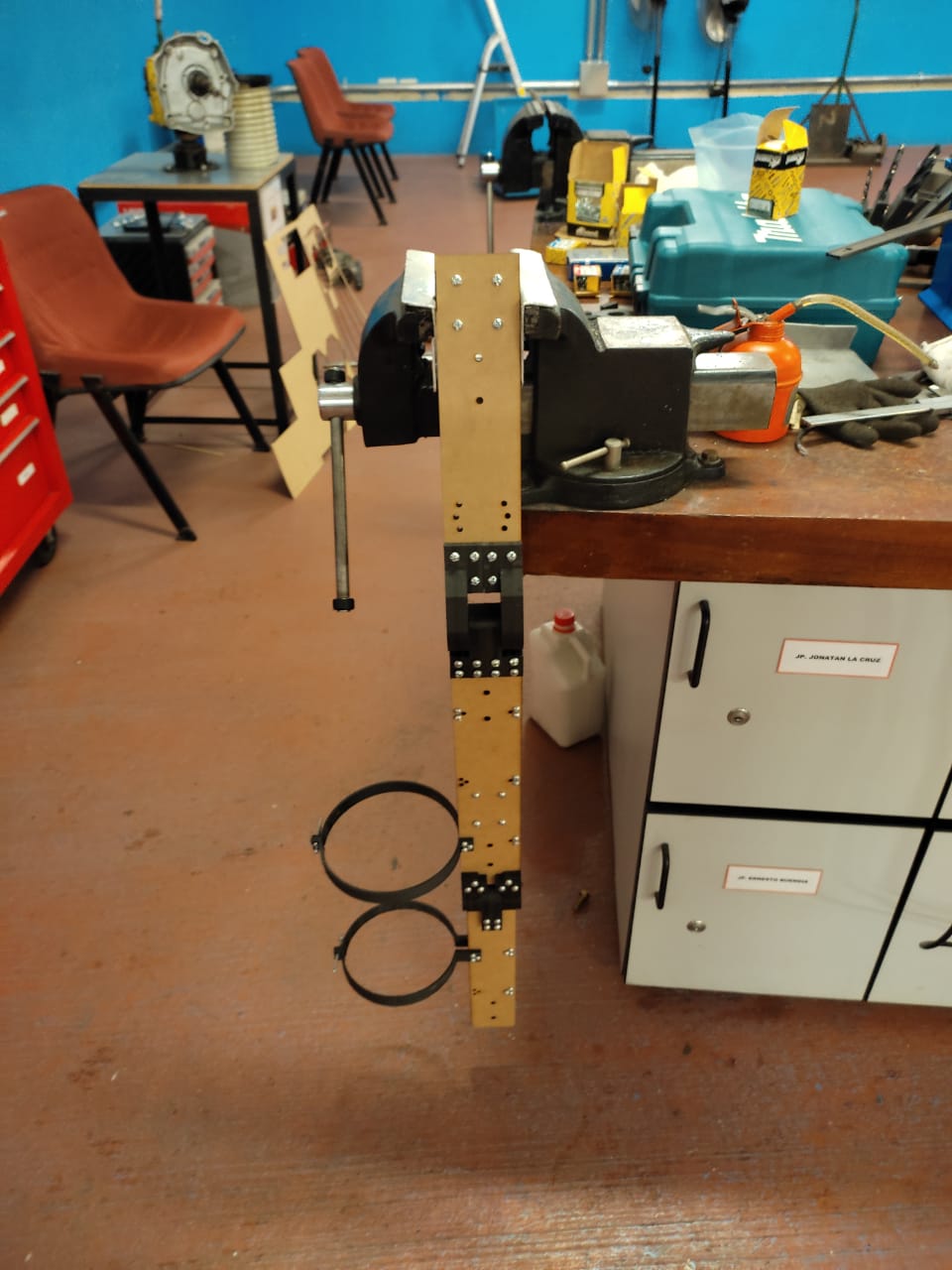
Then I assemblyied the rings.
To finally had this
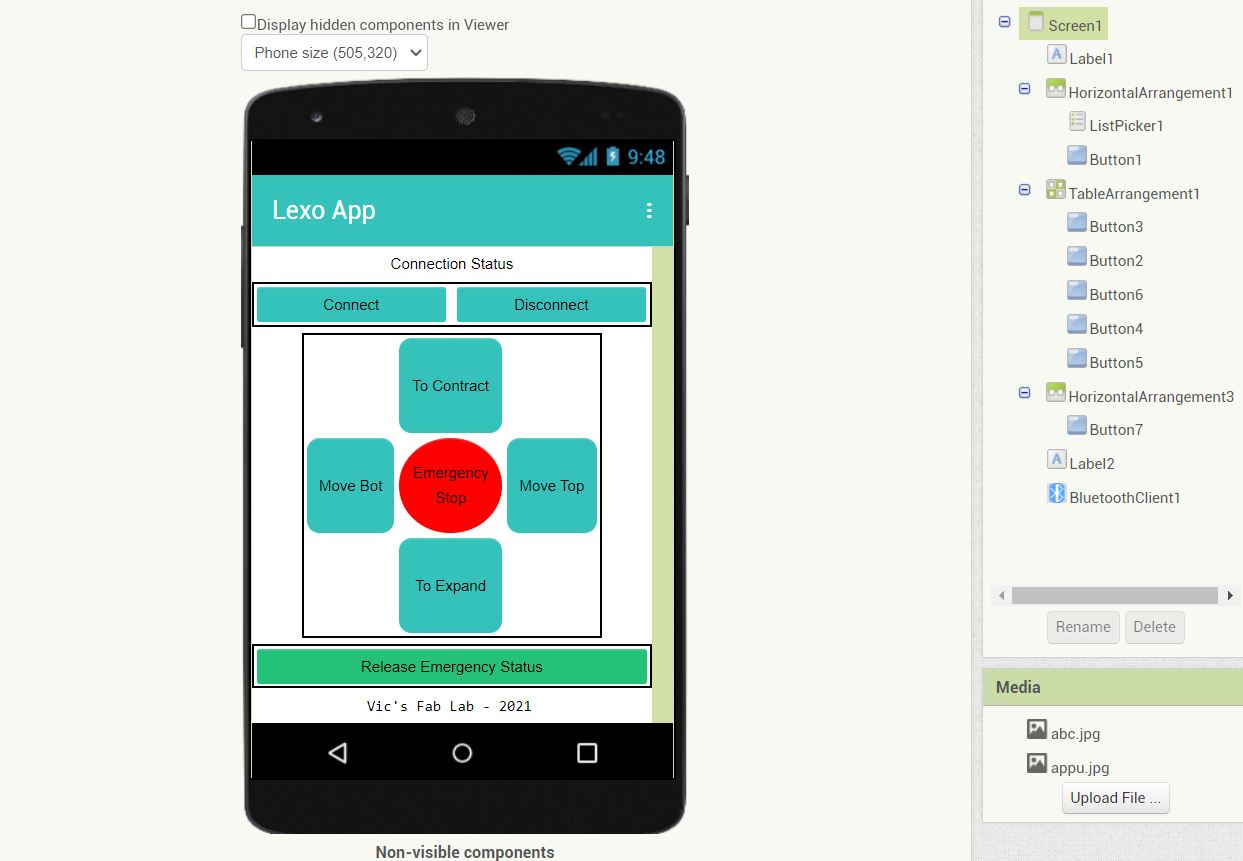
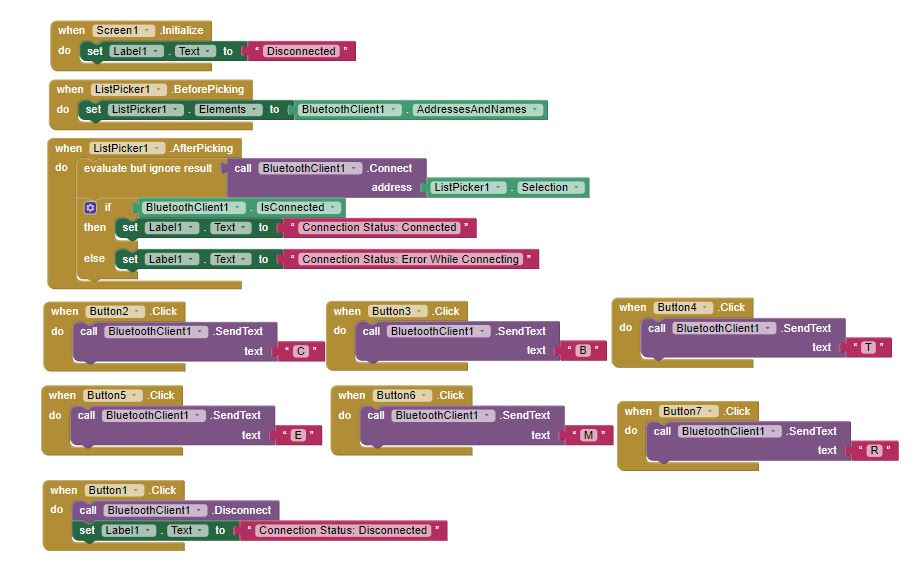
Developing the App!!!
I used AppInventor to create my application. The shape and distribution that I used is based in modern remote controllers which just have the enough button and switchers.
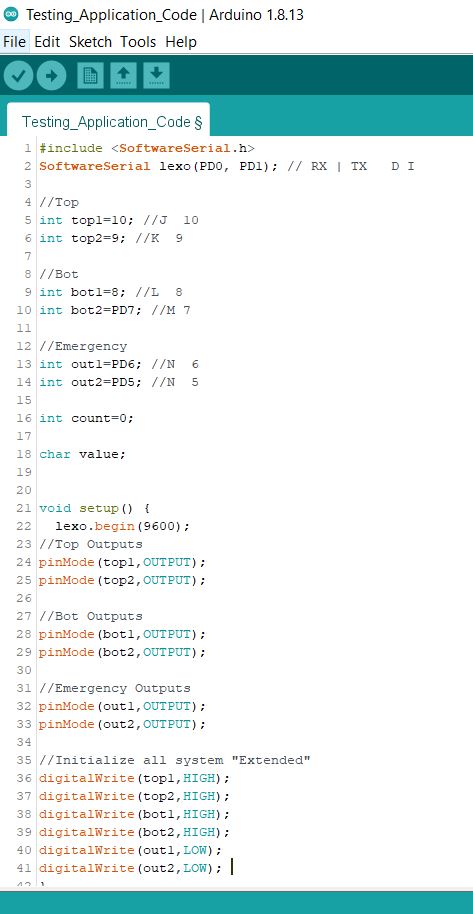
I coded my Leg Exoskeleton using Arduino IDE that I used all this program to "wake up" my projects.
#include <SoftwareSerial.h>
SoftwareSerial lexo(PD0, PD1); // RX | TX D I
//Top
int top1=10; //J 10
int top2=9; //K 9
//Bot
int bot1=8; //L 8
int bot2=PD7; //M 7
//Emergency
int out1=PD6; //N 6
int out2=PD5; //N 5
int count=0;
char value;
void setup() {
lexo.begin(9600);
//Top Outputs
pinMode(top1,OUTPUT);
pinMode(top2,OUTPUT);
//Bot Outputs
pinMode(bot1,OUTPUT);
pinMode(bot2,OUTPUT);
//Emergency Outputs
pinMode(out1,OUTPUT);
pinMode(out2,OUTPUT);
//Initialize all system "Extended"
digitalWrite(top1,HIGH);
digitalWrite(top2,HIGH);
digitalWrite(bot1,HIGH);
digitalWrite(bot2,HIGH);
digitalWrite(out1,LOW);
digitalWrite(out2,LOW);
}
void loop() {
if (lexo.available()>0) //If Bluetooth port
{
value = lexo.read(); //Read the message sent
if (value == 'B' and count==0) //When it's press "BOTTOM" from the App just Bottom Actuator moves
{
digitalWrite(top1,HIGH);
digitalWrite(top2,HIGH);
digitalWrite(bot1,LOW);
digitalWrite(bot2,LOW);
digitalWrite(out1,LOW);
digitalWrite(out2,LOW);
}
if (value == 'C' and count==0) //When it's press "TO COMPRESS" from the App contracts the leg
{
digitalWrite(top1,LOW);
digitalWrite(top2,LOW);
digitalWrite(bot1,LOW);
digitalWrite(bot2,LOW);
digitalWrite(out1,LOW);
digitalWrite(out2,LOW);
}
if (value == 'E' and count==0) //When it's press "TO EXPAND" from the App expands the leg
{
digitalWrite(top1,HIGH);
digitalWrite(top2,HIGH);
digitalWrite(bot1,HIGH);
digitalWrite(bot2,HIGH);
digitalWrite(out1,LOW);
digitalWrite(out2,LOW);
}
if (value == 'M') //When it's press "EMERGENCY" from the App just Stops all system and blocking the current, it was created to save the patient
{
digitalWrite(out1,HIGH);
digitalWrite(out2,HIGH);
count=1;
}
if (value=='R') //When it's press "RELEASE EMERGENCY STATUS" from the App return all to initial status: extend and ready to start
{
digitalWrite(top1,HIGH);
digitalWrite(top2,HIGH);
digitalWrite(bot1,HIGH);
digitalWrite(bot2,HIGH);
digitalWrite(out1,LOW);
digitalWrite(out2,LOW);
count=0;
}
if (value == 'T' and count==0) //When it's press "TOP" from the App just Top Actuator moves
{
digitalWrite(top1,LOW);
digitalWrite(top2,LOW);
digitalWrite(bot1,HIGH);
digitalWrite(bot2,HIGH);
digitalWrite(out1,LOW);
digitalWrite(out2,LOW);
}
}
}
Let me introduce LEXO!!!
Lexo is Aliveee!!!
Let's test the Emergency Button
My Video and Slide Presentation
Files
Below you will find my files which I made this week.




{kind=link}
{kind=link}