Week 13: Networking and Communications¶
I got a late start to this week, and I know that my time is limited, so I tried my best to move as quickly as possible. I got a bit bogged down in making modifications to my circuit board from Week 12, but I was still able to achieve the goals I set out to accomplish.
Apr 28¶
Neil gave a lecture about interfaces, but it was hard to retain much of the information, as I was still focused on output week.
Apr 29¶
At our local node meeting, I discussed my plans for the interface week with Greg. I decided to focus my efforts on getting the data from the MPU-6050 inertial measurement unit (IMU) transmitting to the Arduino IDE serial monitor, then getting that serial data to print on the OLED display. Once I got those up and running, I would attempt to transmit serial data over Bluetooth.
May 1¶
Once I had finished my experiments with the board I had created for week 12, I set out to make a couple modifications to it. This included running 5 volts to the RGB LED, putting the motor and buzzer on a breakout board, and adding mounting holes.
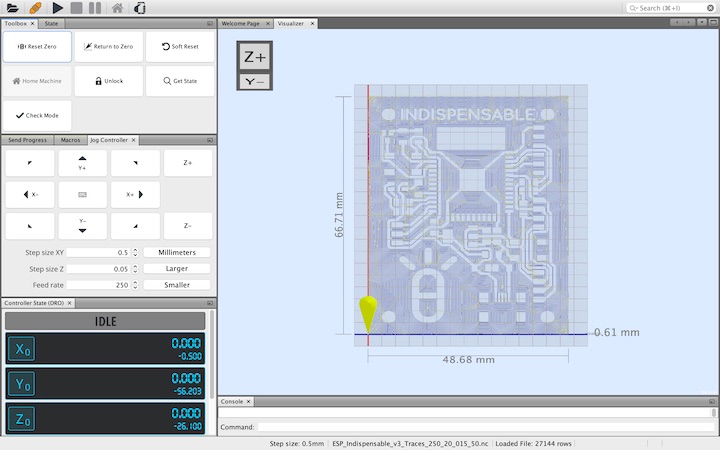
Once I had made these modifications, I uploaded the .png files to Mods to create the g-code toolpaths. I used a large number of offsets in order to clear the entirety of the disconnected copper from the front face of the board.
I then uploaded this file to UGS and milled out the board using my 3018 CNC mill.
Unfortunately, I accidentally damaged the pads for the OLED display during the soldering process, which limited the usefulness of this board for this week’s assignment.
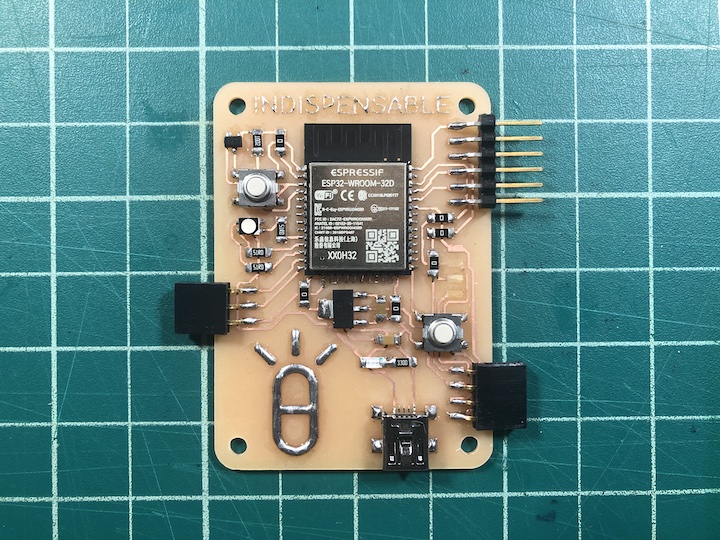
The show must go on, and I continued my tests with the board I milled for Week 12.
May 2¶
I began to work with the GY-521, the breakout board that houses the MPU-6050 6-DoF inertial measurement unit (IMU). I referenced this page from RandomNerdTutorials to help me get started.
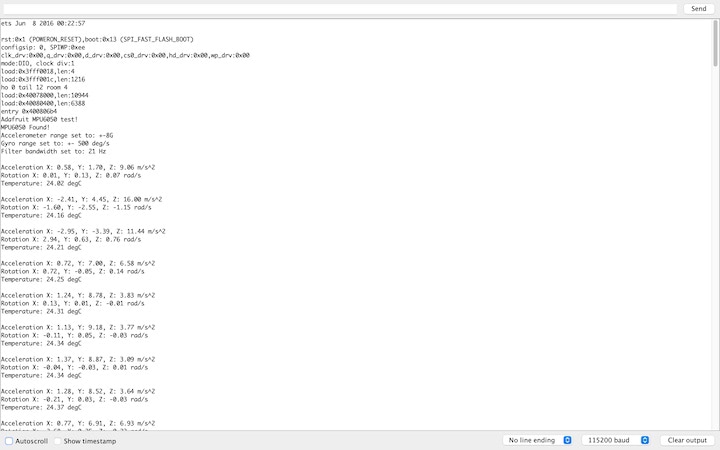
I added the “Adafruit MPU6050” library to the Arduino IDE, and loaded the “basic_readings” example sketch.
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <Wire.h>
Adafruit_MPU6050 mpu;
void setup(void) {
Serial.begin(115200);
while (!Serial)
delay(10); // will pause Zero, Leonardo, etc until serial console opens
Serial.println("Adafruit MPU6050 test!");
// Try to initialize!
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
Serial.print("Accelerometer range set to: ");
switch (mpu.getAccelerometerRange()) {
case MPU6050_RANGE_2_G:
Serial.println("+-2G");
break;
case MPU6050_RANGE_4_G:
Serial.println("+-4G");
break;
case MPU6050_RANGE_8_G:
Serial.println("+-8G");
break;
case MPU6050_RANGE_16_G:
Serial.println("+-16G");
break;
}
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
Serial.print("Gyro range set to: ");
switch (mpu.getGyroRange()) {
case MPU6050_RANGE_250_DEG:
Serial.println("+- 250 deg/s");
break;
case MPU6050_RANGE_500_DEG:
Serial.println("+- 500 deg/s");
break;
case MPU6050_RANGE_1000_DEG:
Serial.println("+- 1000 deg/s");
break;
case MPU6050_RANGE_2000_DEG:
Serial.println("+- 2000 deg/s");
break;
}
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
Serial.print("Filter bandwidth set to: ");
switch (mpu.getFilterBandwidth()) {
case MPU6050_BAND_260_HZ:
Serial.println("260 Hz");
break;
case MPU6050_BAND_184_HZ:
Serial.println("184 Hz");
break;
case MPU6050_BAND_94_HZ:
Serial.println("94 Hz");
break;
case MPU6050_BAND_44_HZ:
Serial.println("44 Hz");
break;
case MPU6050_BAND_21_HZ:
Serial.println("21 Hz");
break;
case MPU6050_BAND_10_HZ:
Serial.println("10 Hz");
break;
case MPU6050_BAND_5_HZ:
Serial.println("5 Hz");
break;
}
Serial.println("");
delay(100);
}
void loop() {
/* Get new sensor events with the readings */
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
/* Print out the values */
Serial.print("Acceleration X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("Rotation X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Serial.print("Temperature: ");
Serial.print(temp.temperature);
Serial.println(" degC");
Serial.println("");
delay(500);
}
Ensuring that the baud rate in the terminal was the same as the one set in the sketch, I could then get a live readout of the data coming from the MPU-6050!
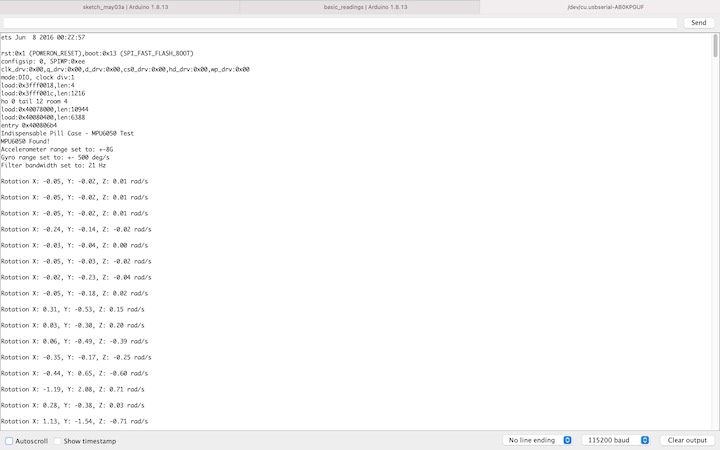
Once this was up and running, I made some tweaks to this sketch to simplify the data coming through to the terminal, as I am only interested in the gyroscope data.
I then moved on to incorporate the OLED display. I referenced this page from RandomNerdTutorials, and loaded the “MPU6050_oled” sketch from the Adafruit MPU6050 library.
Again, I modified this sketch to minimize the data that is output to the OLED, and make it more readable.
#include <Adafruit_MPU6050.h>
#include <Adafruit_SSD1306.h>
#include <Adafruit_Sensor.h>
Adafruit_MPU6050 mpu;
Adafruit_SSD1306 display = Adafruit_SSD1306(128, 32, &Wire);
void setup() {
Serial.begin(115200);
// while (!Serial);
Serial.println("Indispensable Pill Case - MPU6050 & OLED Test");
if (!mpu.begin()) {
Serial.println("Sensor init failed");
while (1)
yield();
}
Serial.println("Found a MPU-6050 sensor");
// SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally
if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x32
Serial.println(F("SSD1306 allocation failed"));
for (;;)
; // Don't proceed, loop forever
}
display.display();
delay(500); // Pause for 2 seconds
display.setTextSize(1);
display.setTextColor(WHITE);
display.setRotation(0);
display.clearDisplay();
display.setCursor(0, 0);
display.print(" ");
display.println("*** INDISPENSABLE ***");
display.println("******PILL CASE******");
delay(1000);
}
void loop() {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
display.clearDisplay();
display.setCursor(0, 0);
Serial.print("Gyroscope ");
Serial.print("X: ");
Serial.print(g.gyro.x, 1);
Serial.print(" rps, ");
Serial.print("Y: ");
Serial.print(g.gyro.y, 1);
Serial.print(" rps, ");
Serial.print("Z: ");
Serial.print(g.gyro.z, 1);
Serial.println(" rps");
display.println("*** INDISPENSABLE ***");
display.print(" X: ");
display.print(g.gyro.x, 1);
display.println("");
display.print(" Y: ");
display.print(g.gyro.y, 1);
display.println("");
display.print(" Z: ");
display.print(g.gyro.z, 1);
display.display();
delay(100);
}
May 3¶
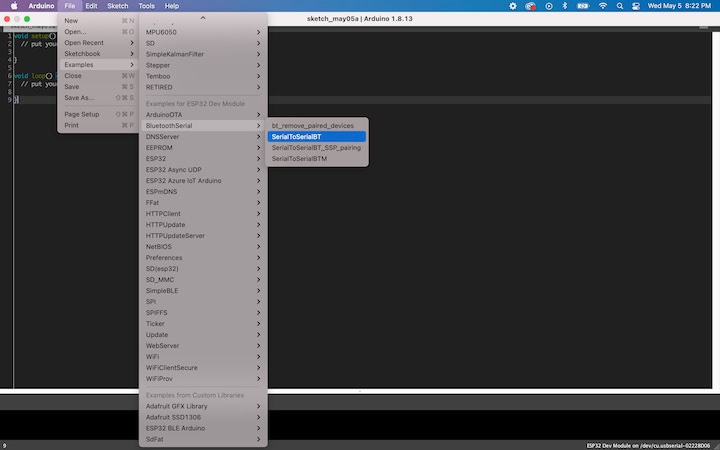
Having accomplished the MPU6050 and OLED components of my week’s goals, I turned my attention to the Bluetooth aspect. With the ESP32 Dev Module selected as the board in the Tools tab, I opened SerialToSerialBT from the BluetoothSerial tab in the Examples tab.
Once compiled, I uploaded this sketch to the board through the FTDI port.
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
BluetoothSerial SerialBT;
void setup() {
Serial.begin(115200);
SerialBT.begin("ESP32test"); //Bluetooth device name
Serial.println("The device started, now you can pair it with bluetooth!");
}
void loop() {
if (Serial.available()) {
SerialBT.write(Serial.read());
}
if (SerialBT.available()) {
Serial.write(SerialBT.read());
}
delay(20);
}
I downloaded a Bluetooth serial monitor app to my iPhone, but I was unable to detect the ESP32’s Bluetooth signal. I borrowed my sister’s Android phone and downloaded the Serial Bluetooth Terminal app from the Google Play Store.
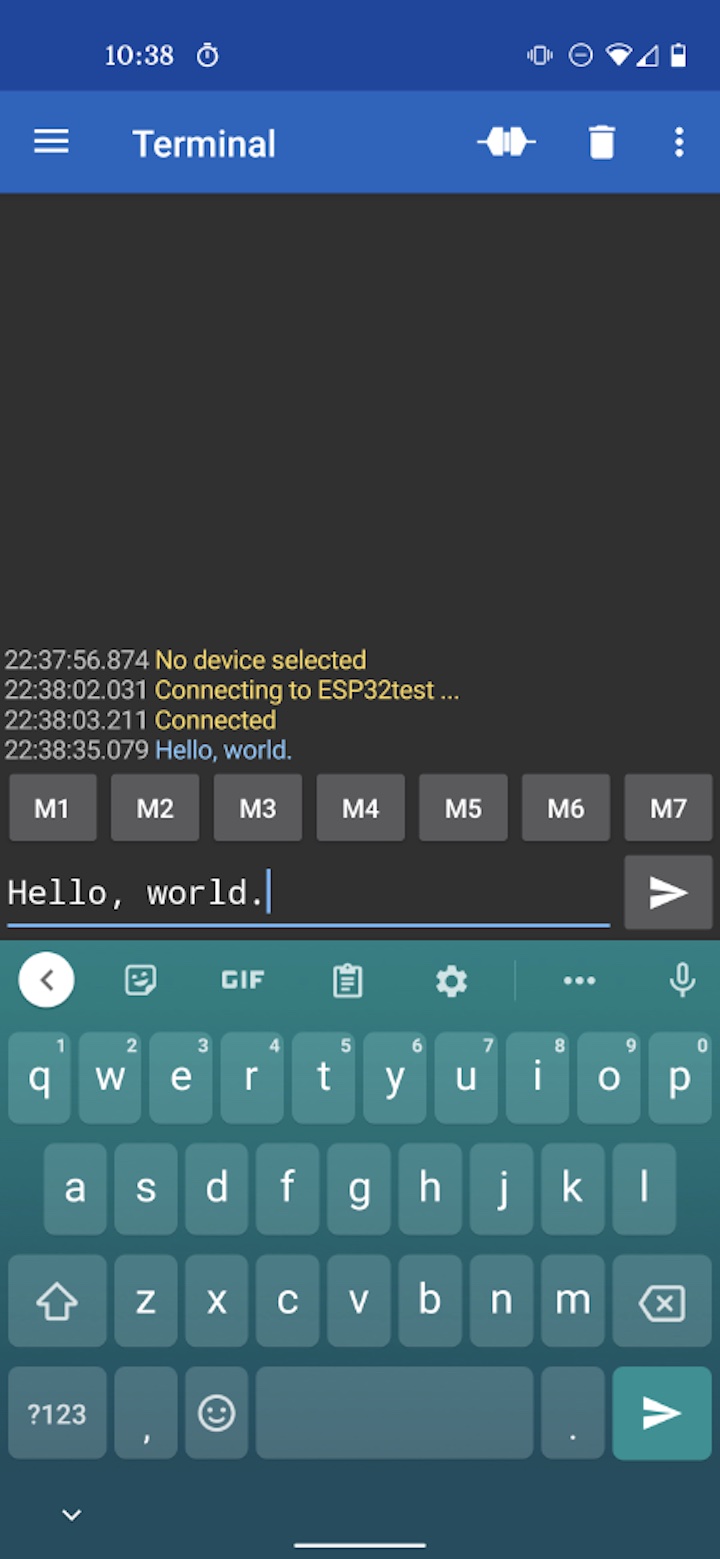
The ESP32 appeared on the list of Bluetooth devices, and I selected it to established a connection to the phone.

Once the two devices were connected, I opened the serial monitor in the Arduino IDE on the laptop that the ESP32 was connected to. I then typed “Hello, world.” into the Serial Bluetooth Terminal on the Android phone, and the message appeared in the serial monitor on the laptop!
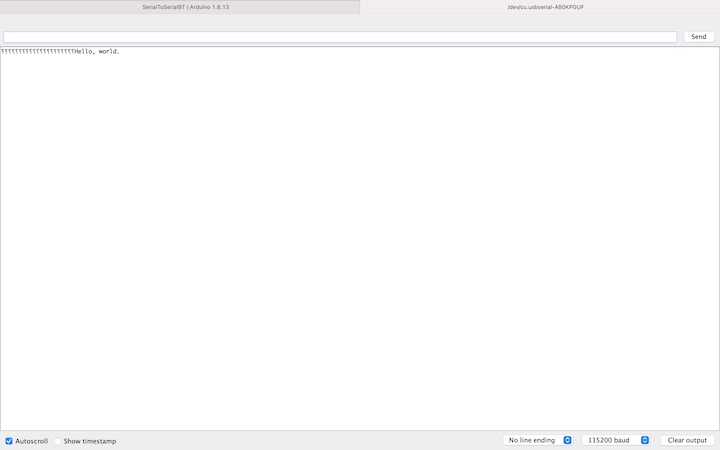
I then typed the same message into the laptop’s serial monitor, and it appeared in the monitor on the phone!