Classes and Final Project
week1 : principles and practices, project management
week3 : computer-controlled cutting
week4 : electronics production
week5 : 3D scanning and printing
week8 : computer-controlled machining
week13 : networking and communications
week14 : interface and application
week15 : applications and implications
week2 : computer-aided design
I took this week lecture from Japan as well. From next week, I'll go to Barcelona and will be able to take a local lecture.
Assignments
This week assignments are that Modeling, sketching, simulating and rendring the final project. I already know some 2D and 3D softwares: photoshop, illustrator, 123D design, blender, sketchup and rhino. So I tried not only these softwares but also softwares that I've never used.
Blender(good)
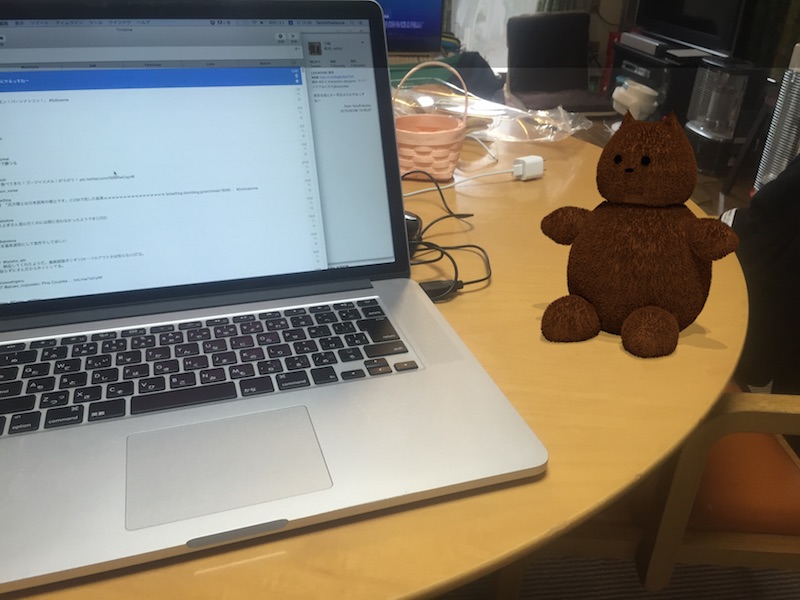
Blender is a 3D software.It is good for modeling living things, but I think it's not good way to make an accurate things. Blender can render the photo realistic animations and export the model to the game engine like Unity. Normally I use it for modeling prototypes because I'm used to it. But when I want to make an accurate model to print with 3D printer, I use 123D design or Rhino. Anyway, in this time I used it as drawing the situation of using my final project. My final project would be connected to the laptop by USB cable, so it is putted near the laptop. I still haven't decided the accurate size, but it might be handy and easy to bring. Also I've not decided the from. (a bear or other animal or... monstar?) So I draw some images.
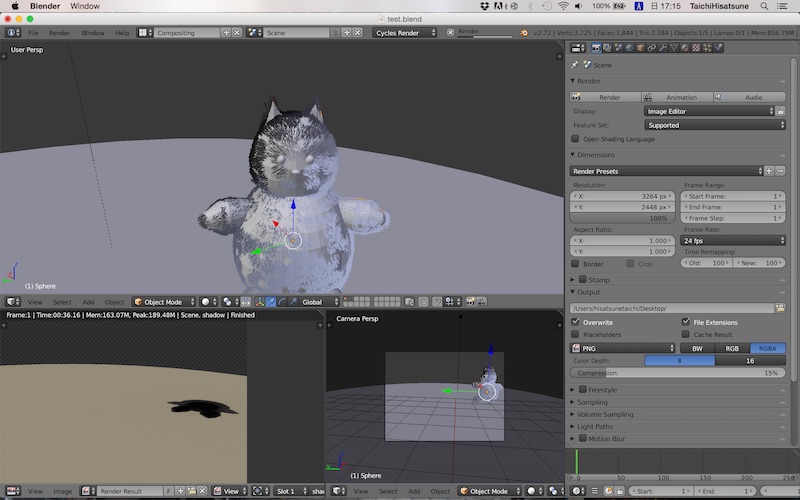
First, I tried to make a composite photograph. Blender can load the photo and mix the 3D model and it. On a 3D model, I add the hair particles then it looks like a bear. Here is the result.
Antimony(failed)
In video lecture, Niel told us how to use antimony. Antimony is a CAD tool and it supports to use Nodes and programs. I think it enables us to draw geometric things easily. It needs the homebrew in order to install it, however there are some problems between Yosemite and homebrew. Now I tried to fix it, but it seems like difficulty. When I success to install it, I'll write it here.
Rhino(good)
Rhino is a 3D CAD tool and it can draw an acuurate model. It is a work in progress on Mac OSX, so if you use a macintosh, you can use it free. I used it to draw the inside of toys. Still I haven't decided the exact form, but at least I need to make some kind of joints models and other mechanical parts.
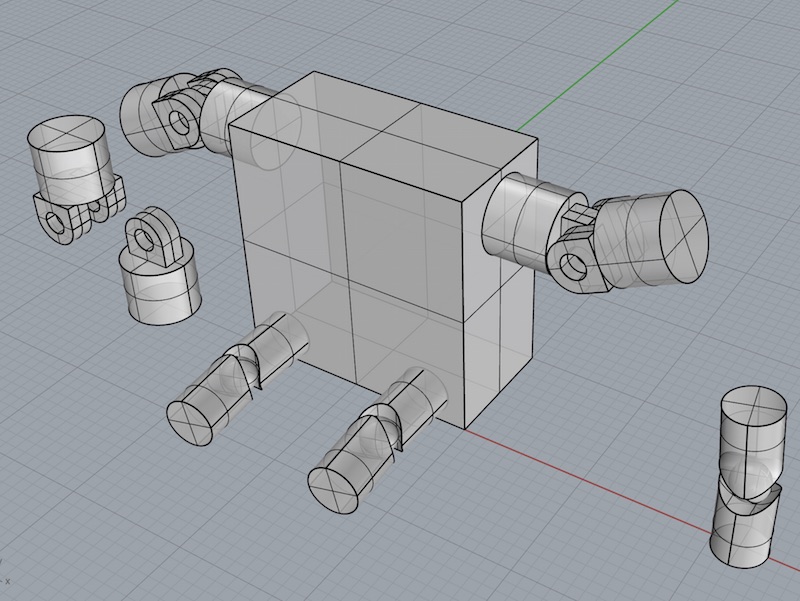
Then I made an inside of a simple human like toy. It has some joints to rotate its arms and legs. About joints, I made two types. As shown below, one enables us to rotate only one direction, but it's really simple and might be easy to make.
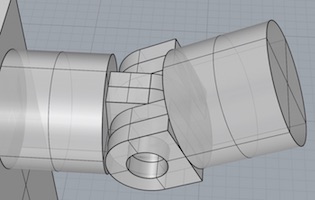
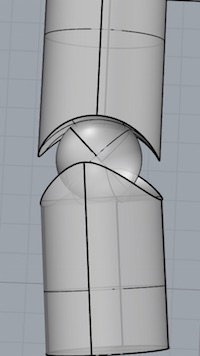
The other one is the ball joint type. It enables us to rotate towards three directions. I need to insert a spring or gum into a joint to withdraw the joints and parts. Talking about flexibility, it is really good. However I think it is difficult to simulate and measure the rotations. The result are below.