Classes and Final Project
week1 : principles and practices, project management
week3 : computer-controlled cutting
week4 : electronics production
week5 : 3D scanning and printing
week8 : computer-controlled machining
week13 : networking and communications
week14 : interface and application
week15 : applications and implications
week15 : Applications and implications
I described the progress of final project in final project page. Please see it after this page.
Assignment: propose a final project that integrates the range of units covered
what will it do?
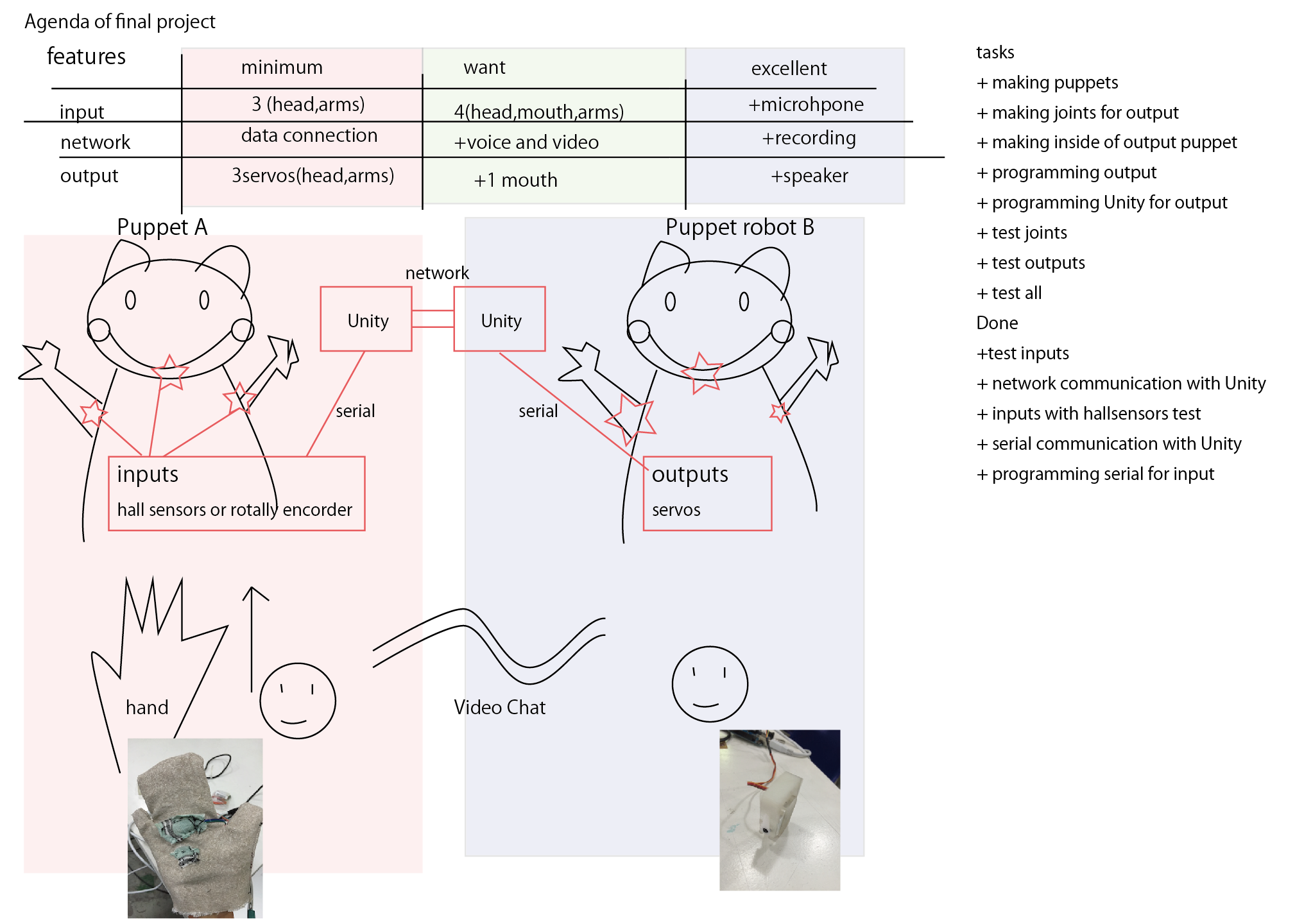
The synchronized puppets connected via the internet will work in the same way. Users can move puppets and then, the other puppet will move in the same way.
who's done what beforehand?
Nubot is the similar production which can be used with Skype or Hangout. Nubot can be controlled via a Skype dialpad over the distance. http://nuuo.jp/nubot/index_e.html
what materials and components will be required?
3 hallsensors,3 servos,2 Attiny44 ,some resistors,capasitors,batteries,regulators,3 tiny magnets,fabrics for puppets and wool.
where will they come from?
Some of components can be found in fablab inventory. fabrics and wool can be found in fabrics store.
how much will it cost?
For 2 puppets,
wool and fabrics: 3$~
Attiny44: 1.6$ * 2 = 3.2$
servos: 5$ * 3 = 15$
hall sensors: 1$
battery: 3$
what parts and systems will be made?
input: 3 hall sensors and Attiny44. They measure the angle of each connections. These are covered with wool and fabrics.
output: 3 servos, battery and Attiny44. They move just as the angle of inputs. Also These are covered with wool and fabrics.
Unity Network: Unity gets data from Attiny44 and send it to the other Unity over the internet and the other one gets data and send it to its Attiny44.
what processes will be used?
3D modeling: To design puppets and 3D modeling in Unity, blender was used. To design joints, Solidworks was used.
electronics: To desgin input and output boards, EAGLE was used.
milling: To make PCB boards, I use a milling machine and put components.
3D printing: To make joints, 3D printer was used.
C# programming: To program Unity, You need to use C# (Because I use C# system to connect serial port.)
arduino programming: To program Attiny44, I programed it with Arduino software. You can also use C code.
what tasks need to be completed?
making boards for inputs and outputs.
making joints for outputs.
making puppets.
programming Unity software.
programming Attiny44.
what questions need to be answered?
If both puppets are moved at same time, how do these move? (Now the puppets are separated with inputs and outputs, but I might set priority to control this problem.)
what is the schedule?
how will it be evaluated?
I would evaluate it how it can simulate the other one's movement exactly.