Week 19
Project development
Week 1: Principles and Practices
Week 3: Computer Aided Design

Week 10: Input Devices
Week 11: Applications and Implications
Week 12: Output Devices
Week 14: Embedded Networking and Communications
Week 18: Invention, Intellectual Property and Business Models

Time Keeper by Anooj Jacob is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
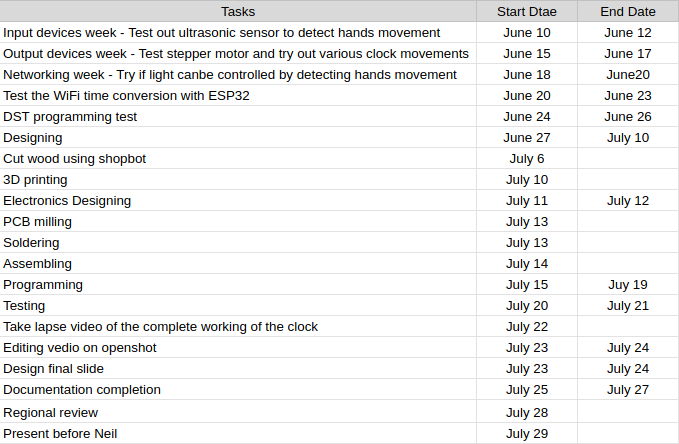
My Plan to finish the project:


Project Development Week
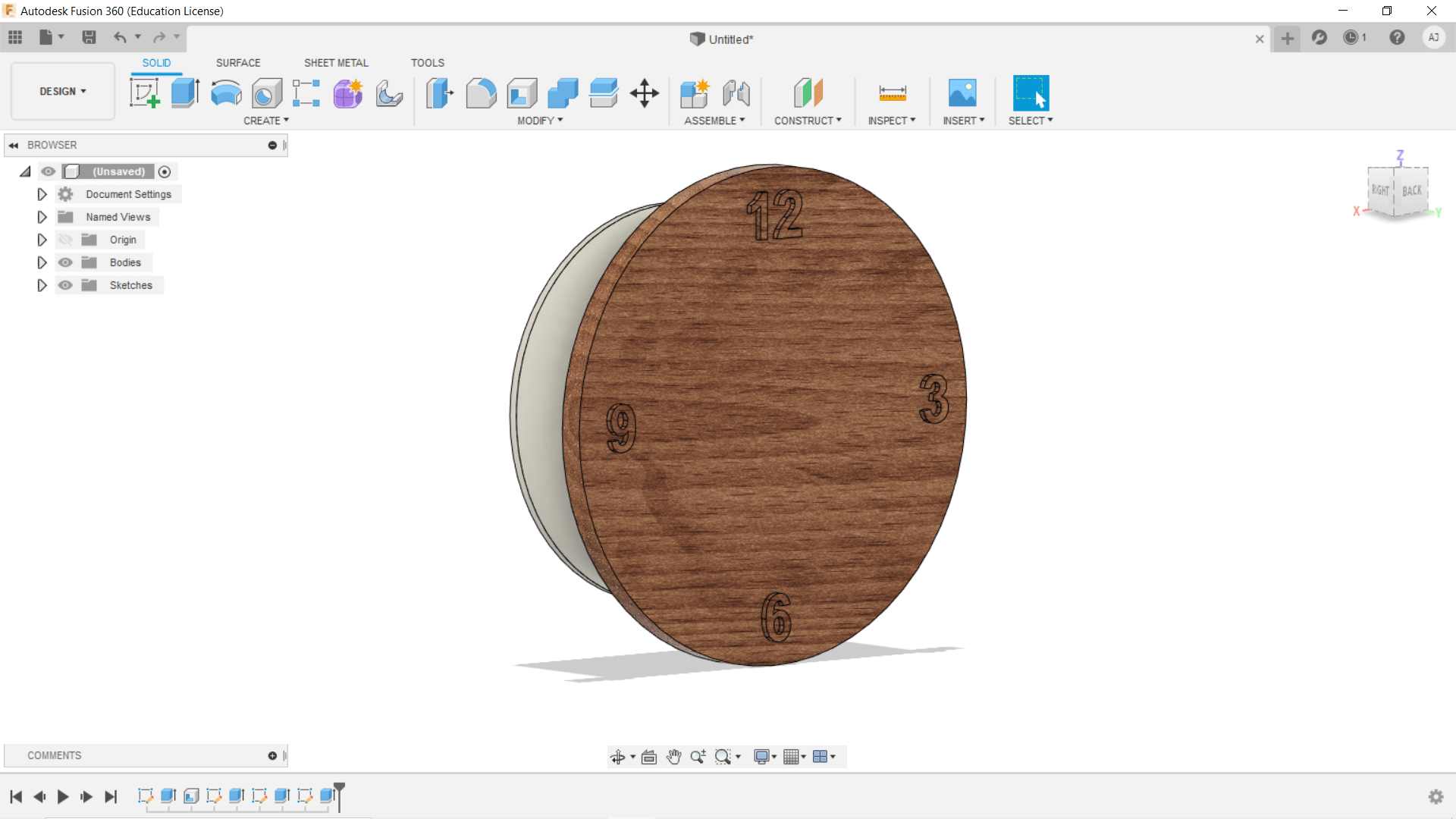
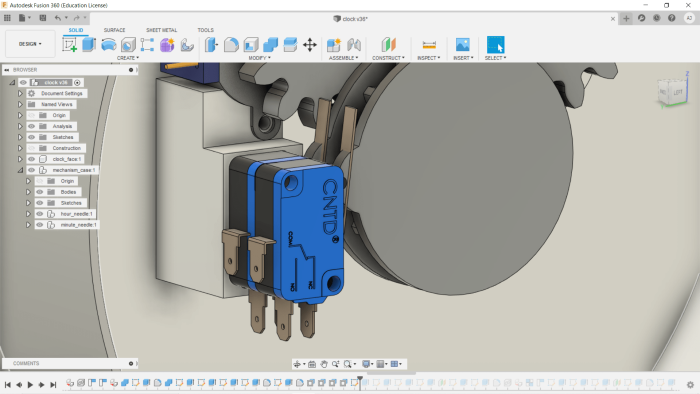
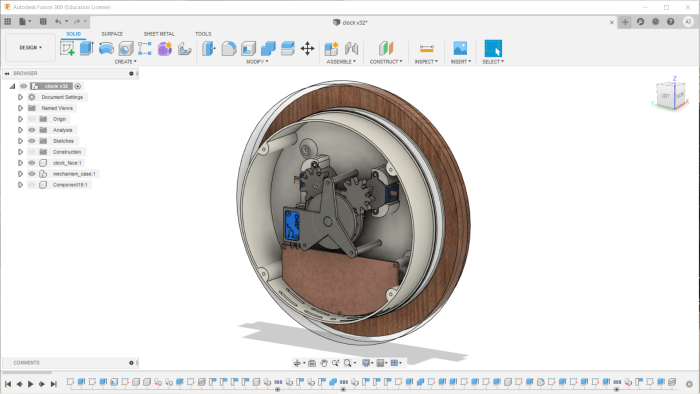
DESIGNING












ELECTRONICS
Soc / Microcontroller Module

Motor Driver

Stepper Motor

Sensing Module

Power Supply

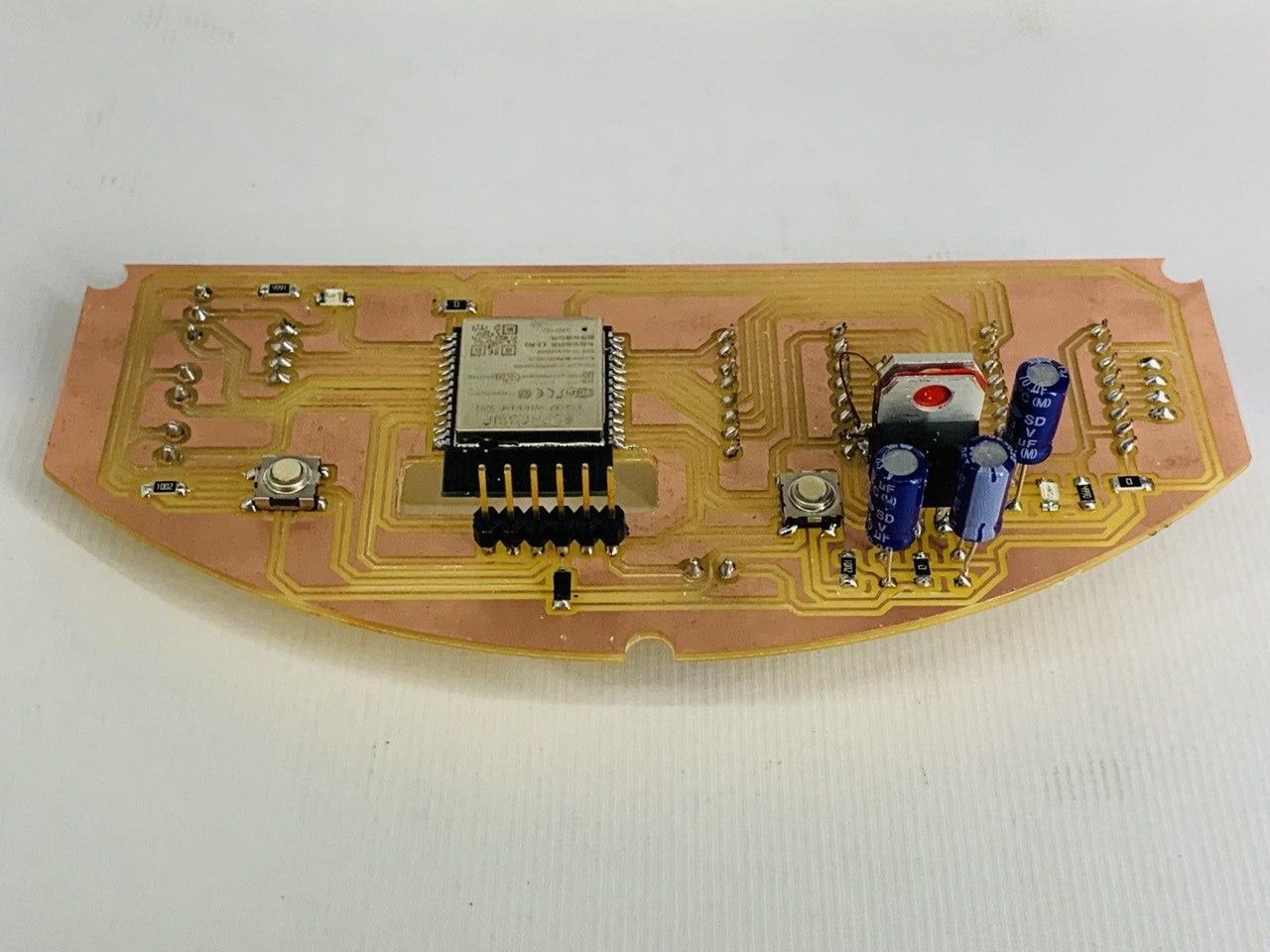
PCB DESIGNING



PCB MILLING AND SOLDERING



MANUFACTURING
- 3D Printing
- Laser cutting
- Sand Blasting
- CNC Milling
3D PRINTING




LASER CUTTING

SAND BLASTING


CNC MILLING



ASSEMBLING





PROGRAMMING
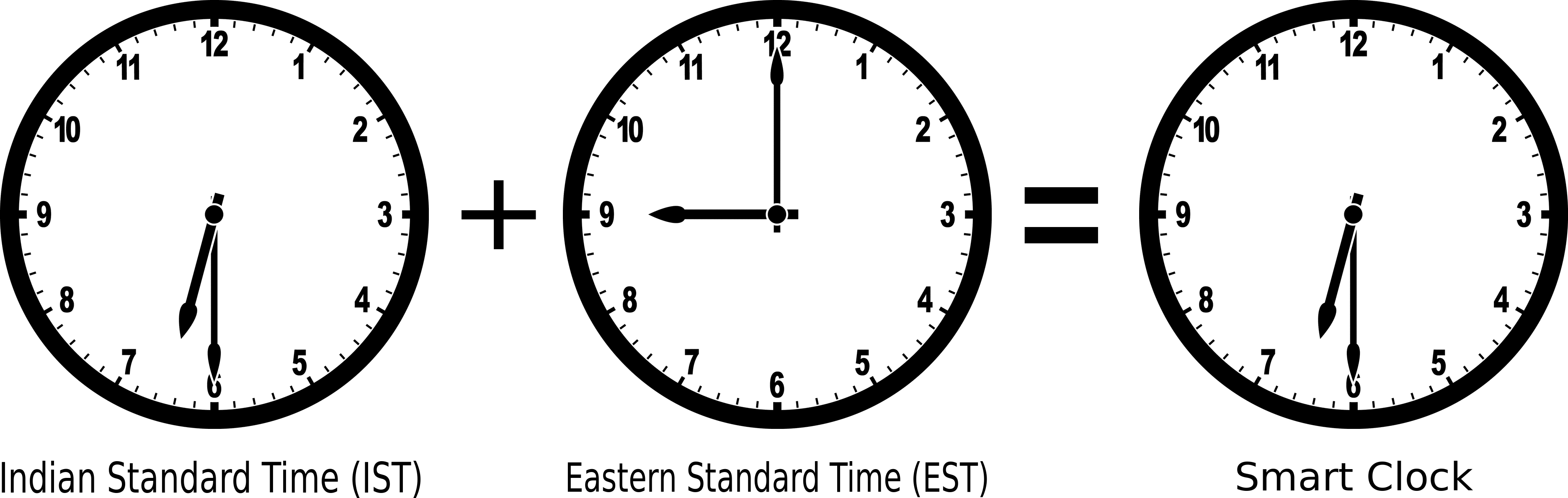
- Fetching Indian Standard Time (IST) and Eastern Standard Time (EST) from the internet.
- Find the number of steps required by the motor to turn for 1 minute and 1 hour.
1) Fetching Time from internet

2) Number of steps required by the motor to turn for 1 minute and 1 hour




Arduino Code:
#include <NTPClient.h>
#include <WiFi.h>
#include <WiFiUdp.h>
#include <time.h>
#include <Adafruit_NeoPixel.h>
#define WiFi_led 4
#define dir1 15
#define step1 13
#define dir2 12
#define step2 14
#define MS1 32
#define MS2 33
#define MS3 25
#define lms1 4
#define lms2 2
#define neo 18
#define trigPin 16
#define echoPin 17
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(19, neo, NEO_GRB + NEO_KHZ800);
int HR = 0, MIN = 0, SEC = 0;
int HR_P = 0, MIN_P = 0;
int USHr = 0, USMin = 0, USSec = 0;
const char *ssid = "panakkal";
const char *password = "JacOb123";
WiFiClient client;
const char* ntpServer = "pool.ntp.org";
int gmtOffset_sec_US = -18000;
int gmtOffset_sec_IN = 19800;
char daysOfTheWeek[7][12] = {"Sunday", "Monday", "Tuesday", "Wednesday", "Thursday", "Friday", "Saturday"};
WiFiUDP ntpUDP;
NTPClient timeClientIN(ntpUDP, "pool.ntp.org", gmtOffset_sec_IN);
NTPClient timeClientUS(ntpUDP, "pool.ntp.org", gmtOffset_sec_US);
void setup()
{
pinMode(WiFi_led, OUTPUT);
pinMode(step1, OUTPUT);
pinMode(dir1, OUTPUT);
pinMode(step2, OUTPUT);
pinMode(dir2, OUTPUT);
pinMode(MS1, OUTPUT);
pinMode(MS2, OUTPUT);
pinMode(MS2, OUTPUT);
pinMode(neo, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(lms1, INPUT_PULLUP);
pinMode(lms2, INPUT_PULLUP);
Serial.begin(115200);
WiFi.begin(ssid, password);
Serial.println();
Serial.println("Connecting to WiFi");
while ( WiFi.status() != WL_CONNECTED )
{
digitalWrite(WiFi_led, HIGH);
Serial.print( "." );
delay ( 250 );
digitalWrite(WiFi_led, LOW);
Serial.print( "." );
delay ( 250 );
}
digitalWrite(WiFi_led, HIGH);
Serial.println();
Serial.println("WiFi Connected, Fetching Time from web");
pixels.begin();
rotate_zero();
timeClientIN.begin();
timeClientUS.begin();
Set_Needle();
}
void loop()
{
UpdateINTime();
Change_INTime();
Neo_IN();
Presence();
delay(500);
}
void rotate_zero() //Function to set the needles to zero position
{
int limit1 = digitalRead(lms1);
int limit2 = digitalRead(lms2);
digitalWrite(MS1, LOW);
digitalWrite(MS2, LOW);
digitalWrite(MS3, LOW);
digitalWrite(dir1, LOW);
digitalWrite(dir2, LOW);
for(int x = 0; x < 3500 && limit1 == 1; x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
limit1 = digitalRead(lms1);
}
for(int x = 0; x < 3500 && limit2 == 1; x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
limit2 = digitalRead(lms2);
}
}
void Set_Needle() //Function to set the needles to the current IST
{
rotate_zero();
UpdateINTime();
Serial.print("INDIA : ");
Serial.print(daysOfTheWeek[timeClientIN.getDay()]);
Serial.print(", ");
Serial.print(HR);
Serial.print(":");
Serial.print(MIN);
Serial.print(":");
Serial.println(SEC);
UpdateUSTime();
int stephr = 0;
int stepmin = 0;
if(stepmin != MIN)
{
digitalWrite(MS1, LOW);
digitalWrite(MS2, LOW);
digitalWrite(MS3, LOW);
if(MIN <= 30)
{
digitalWrite(dir1, HIGH);
for(int x = 0; x < (51.2*MIN); x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
}
}
if(MIN > 30)
{
digitalWrite(dir1, LOW);
for(int x = 0; x < (51.2*(60-MIN)); x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
}
}
stepmin = MIN;
}
if(stephr != HR)
{
digitalWrite(MS1, LOW);
digitalWrite(MS2, LOW);
digitalWrite(MS3, LOW);
if((HR > 0 && HR <= 6) || (HR > 12 && HR <= 18))
{
digitalWrite(dir2, HIGH);
if(HR > 0 && HR <= 6)
{
for(int x = 0; x < (256*HR); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
else
{
for(int x = 0; x < (256*(HR-12)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
}
if((HR > 6 && HR < 12) || (HR > 18 && HR < 24))
{
digitalWrite(dir2, LOW);
if(HR > 6 && HR < 12)
{
for(int x = 0; x < (256*(12-HR)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
else
{
for(int x = 0; x < (256*(24-HR)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
}
stephr = HR;
}
MIN_P = MIN;
HR_P = HR;
}
void UpdateINTime() //Function to fetch IST from internet
{
timeClientIN.update();
HR = timeClientIN.getHours();
MIN = timeClientIN.getMinutes();
SEC = timeClientIN.getSeconds();
}
void UpdateUSTime() //Function to fetch EST from internet
{
timeClientUS.update();
USHr = timeClientUS.getHours();
USMin = timeClientUS.getMinutes();
USSec = timeClientUS.getSeconds();
Serial.print("NEW JERSEY : ");
Serial.print(daysOfTheWeek[timeClientUS.getDay()]);
Serial.print(", ");
Serial.print(USHr);
Serial.print(":");
Serial.print(USMin);
Serial.print(":");
Serial.println(USSec);
}
void Change_INTime() //Function to move the needles every minute
{
int limit1 = digitalRead(lms1);
int limit2 = digitalRead(lms2);
if(MIN_P != MIN)
{
Serial.print("INDIA : ");
Serial.print(daysOfTheWeek[timeClientIN.getDay()]);
Serial.print(", ");
Serial.print(HR);
Serial.print(":");
Serial.print(MIN);
Serial.print(":");
Serial.println(SEC);
UpdateUSTime();
digitalWrite(dir1, HIGH);
if(MIN == 0)
{
for(int x = 0; x < 3500 && limit1 == 1; x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
limit1 = digitalRead(lms1);
}
}
else
{
for(int x = 0; x < (51.2*(MIN-MIN_P)); ++x)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
}
MIN_P = MIN;
}
}
if(HR_P != HR)
{
digitalWrite(dir2, HIGH);
if(HR == 0 || HR == 12)
{
for(int x = 0; x < 3500 && limit2 == 1; x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
limit2 = digitalRead(lms2);
}
}
else
{
for(int x = 0; x < (256*(HR-HR_P)); ++x)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
HR_P = HR;
}
}
void Show_USTime() //Function to move the needles to show the EST
{
rotate_zero();
UpdateUSTime();
int stephr = 0;
int stepmin = 0;
if(stepmin != USMin)
{
digitalWrite(MS1, LOW);
digitalWrite(MS2, LOW);
digitalWrite(MS3, LOW);
if(USMin <= 30)
{
digitalWrite(dir1, HIGH);
for(int x = 0; x < (51.2*USMin); x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
}
}
if(USMin > 30)
{
digitalWrite(dir1, LOW);
for(int x = 0; x < (51.2*(60-USMin)); x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
}
}
stepmin = USMin;
}
if(stephr != USHr)
{
digitalWrite(MS1, LOW);
digitalWrite(MS2, LOW);
digitalWrite(MS3, LOW);
if((USHr > 0 && USHr <= 6) || (USHr > 12 && USHr <= 18))
{
digitalWrite(dir2, HIGH);
if(USHr > 0 && USHr <= 6)
{
for(int x = 0; x < (256*USHr); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
else
{
for(int x = 0; x < (256*(USHr-12)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
}
if((USHr > 6 && USHr < 12) || (USHr > 18 && USHr < 24))
{
digitalWrite(dir2, LOW);
if(USHr > 6 && USHr < 12)
{
for(int x = 0; x < (256*(12-USHr)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
else
{
for(int x = 0; x < (256*(24-USHr)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
}
stephr = USHr;
}
}
void Neo_IN() //Function for the neopixel to show the daylight
{
if(HR >=6 && HR <= 9)
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color( 174, 214, 241 )); // Light blue color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
}
if(HR >=10 && HR <= 12)
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color( 249, 231, 159 )); // Yellow color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
}
if(HR >=13 && HR <= 16)
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color( 250, 215, 160 )); // Orange color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
}
if(HR >=17 && HR <= 19)
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color(247,220,143)); // Moderately dark blue color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
}
if(HR >=20 && HR <= 22)
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color( 36, 113, 163 )); // Dark blue color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
}
else
{
pixels.clear();
}
}
void Presence() //Function for the ultrasonic sensor
{
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
Serial.println(distance);
delay(1000);
if(distance > 20 && distance <=50)
{
Serial.println("Human within 10cm");
Show_USTime();
delay(10000);
Set_Needle();
}
else if(distance > 100)
{
if(HR < 6 && HR >= 23)
{
Serial.println("Human within 30cm");
Night_light();
}
}
}
void Night_light() //Function to turn ON the night light
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color(255, 244, 229)); // warm light color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
delay(10000);
pixels.clear();
}
This smart clock is a dream project of mine because I have spent a lot of time and effort to make it this much and moreover it was something I made for my mother. This will be a future project of mine and I will complete it even after my academy and I will document my progress in this page.