Final Project
Since my sister is settled in New Jersey and my mother being in India they both have a time gap of -8:30 hours. And my mother always use her fingers to subtract 8:30 hours from the Indian time to obtain the Eastern time so that she can call my sister and talk to her. I noticed that it was'nt easy for her to subtract 8:30 hours all the time, and even though she uses an android phone she never used the clock app to find the time nor googled. So I thought I can easly solve this problem by making a smart clock for her.
The full development of the final project can be found in the documentation of week 19: project development

Final Project video and slide

What does it do?
Who’s done what beforehand?
- Ingrein Smart Clock
A project on Kickstarter with almost the same concept as mine. The clock has a wooden frame and works with the quarts mechanism. It has a LCD screen and shows all the information using Wifi connection.

- Story: The Levitating Time Piece
A project on Kickstarter with a stunning design. The most attractive part is the levitating metal ball that moves around the clock. It is a unique way to visualize time. It has smart connectivity and a seamless display.

What did you design?
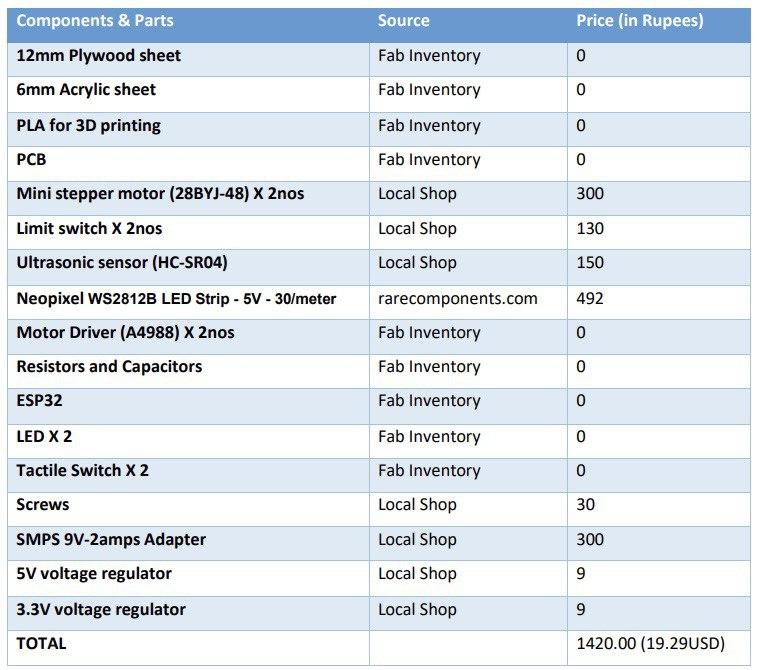
What materials and components were used? Where did they come from? How much did they cost?
What parts and systems were made?
What processes were used?
- CNC Milling : To make the clock face using plywood.
- Lasercutting : To make the hour and minute hand, back cover for the casing and a lock for the mechanism.
- 3D Printing : To make the spur gears.
- Sand Blasting : To give a rough texture for the acrylic around the LED strip.
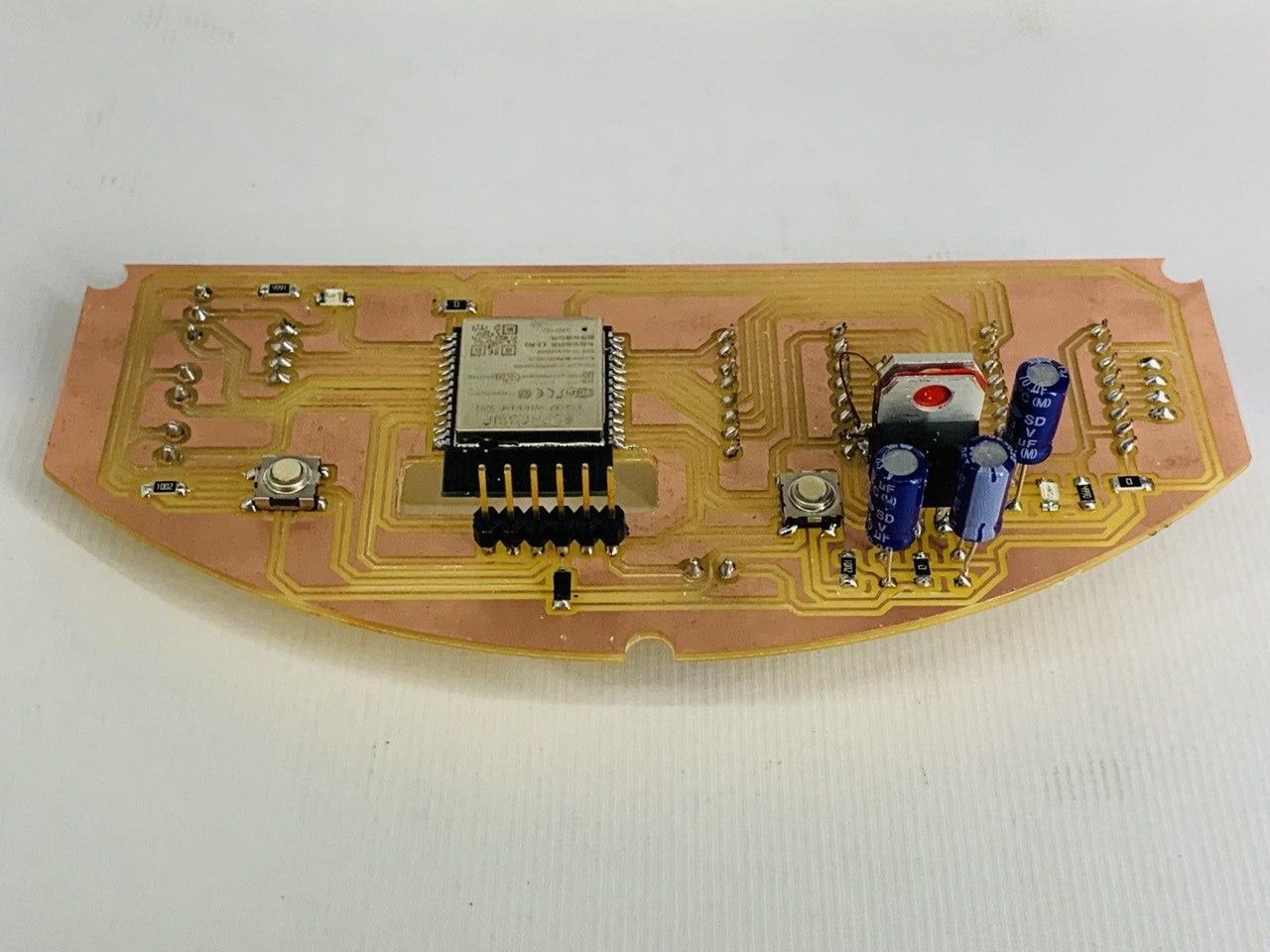
- PCB Milling : To mill the main control board.
- Soldering : For stuffing all the electronic components onto the PCB board.
What questions were answered?
What worked? What didn’t?
How was it evaluated?
What are the implications?
Fabrication Process
Designing
Electronics Designing





3D PRINTING




LASER CUTTING

SAND BLASTING


CNC MILLING



Programming
Arduino Code:
#include <NTPClient.h>
#include <WiFi.h>
#include <WiFiUdp.h>
#include <time.h>
#include <Adafruit_NeoPixel.h>
#define WiFi_led 4
#define dir1 15
#define step1 13
#define dir2 12
#define step2 14
#define MS1 32
#define MS2 33
#define MS3 25
#define lms1 4
#define lms2 2
#define neo 18
#define trigPin 16
#define echoPin 17
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(19, neo, NEO_GRB + NEO_KHZ800);
int HR = 0, MIN = 0, SEC = 0;
int HR_P = 0, MIN_P = 0;
int USHr = 0, USMin = 0, USSec = 0;
const char *ssid = "panakkal";
const char *password = "JacOb123";
WiFiClient client;
const char* ntpServer = "pool.ntp.org";
int gmtOffset_sec_US = -18000;
int gmtOffset_sec_IN = 19800;
char daysOfTheWeek[7][12] = {"Sunday", "Monday", "Tuesday", "Wednesday", "Thursday", "Friday", "Saturday"};
WiFiUDP ntpUDP;
NTPClient timeClientIN(ntpUDP, "pool.ntp.org", gmtOffset_sec_IN);
NTPClient timeClientUS(ntpUDP, "pool.ntp.org", gmtOffset_sec_US);
void setup()
{
pinMode(WiFi_led, OUTPUT);
pinMode(step1, OUTPUT);
pinMode(dir1, OUTPUT);
pinMode(step2, OUTPUT);
pinMode(dir2, OUTPUT);
pinMode(MS1, OUTPUT);
pinMode(MS2, OUTPUT);
pinMode(MS2, OUTPUT);
pinMode(neo, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(lms1, INPUT_PULLUP);
pinMode(lms2, INPUT_PULLUP);
Serial.begin(115200);
WiFi.begin(ssid, password);
Serial.println();
Serial.println("Connecting to WiFi");
while ( WiFi.status() != WL_CONNECTED )
{
digitalWrite(WiFi_led, HIGH);
Serial.print( "." );
delay ( 250 );
digitalWrite(WiFi_led, LOW);
Serial.print( "." );
delay ( 250 );
}
digitalWrite(WiFi_led, HIGH);
Serial.println();
Serial.println("WiFi Connected, Fetching Time from web");
pixels.begin();
rotate_zero();
timeClientIN.begin();
timeClientUS.begin();
Set_Needle();
}
void loop()
{
UpdateINTime();
Change_INTime();
Neo_IN();
Presence();
delay(500);
}
void rotate_zero() //Function to set the needles to zero position
{
int limit1 = digitalRead(lms1);
int limit2 = digitalRead(lms2);
digitalWrite(MS1, LOW);
digitalWrite(MS2, LOW);
digitalWrite(MS3, LOW);
digitalWrite(dir1, LOW);
digitalWrite(dir2, LOW);
for(int x = 0; x < 3500 && limit1 == 1; x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
limit1 = digitalRead(lms1);
}
for(int x = 0; x < 3500 && limit2 == 1; x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
limit2 = digitalRead(lms2);
}
}
void Set_Needle() //Function to set the needles to the current IST
{
rotate_zero();
UpdateINTime();
Serial.print("INDIA : ");
Serial.print(daysOfTheWeek[timeClientIN.getDay()]);
Serial.print(", ");
Serial.print(HR);
Serial.print(":");
Serial.print(MIN);
Serial.print(":");
Serial.println(SEC);
UpdateUSTime();
int stephr = 0;
int stepmin = 0;
if(stepmin != MIN)
{
digitalWrite(MS1, LOW);
digitalWrite(MS2, LOW);
digitalWrite(MS3, LOW);
if(MIN <= 30)
{
digitalWrite(dir1, HIGH);
for(int x = 0; x < (51.2*MIN); x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
}
}
if(MIN > 30)
{
digitalWrite(dir1, LOW);
for(int x = 0; x < (51.2*(60-MIN)); x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
}
}
stepmin = MIN;
}
if(stephr != HR)
{
digitalWrite(MS1, LOW);
digitalWrite(MS2, LOW);
digitalWrite(MS3, LOW);
if((HR > 0 && HR <= 6) || (HR > 12 && HR <= 18))
{
digitalWrite(dir2, HIGH);
if(HR > 0 && HR <= 6)
{
for(int x = 0; x < (256*HR); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
else
{
for(int x = 0; x < (256*(HR-12)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
}
if((HR > 6 && HR < 12) || (HR > 18 && HR < 24))
{
digitalWrite(dir2, LOW);
if(HR > 6 && HR < 12)
{
for(int x = 0; x < (256*(12-HR)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
else
{
for(int x = 0; x < (256*(24-HR)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
}
stephr = HR;
}
MIN_P = MIN;
HR_P = HR;
}
void UpdateINTime() //Function to fetch IST from internet
{
timeClientIN.update();
HR = timeClientIN.getHours();
MIN = timeClientIN.getMinutes();
SEC = timeClientIN.getSeconds();
}
void UpdateUSTime() //Function to fetch EST from internet
{
timeClientUS.update();
USHr = timeClientUS.getHours();
USMin = timeClientUS.getMinutes();
USSec = timeClientUS.getSeconds();
Serial.print("NEW JERSEY : ");
Serial.print(daysOfTheWeek[timeClientUS.getDay()]);
Serial.print(", ");
Serial.print(USHr);
Serial.print(":");
Serial.print(USMin);
Serial.print(":");
Serial.println(USSec);
}
void Change_INTime() //Function to move the needles every minute
{
int limit1 = digitalRead(lms1);
int limit2 = digitalRead(lms2);
if(MIN_P != MIN)
{
Serial.print("INDIA : ");
Serial.print(daysOfTheWeek[timeClientIN.getDay()]);
Serial.print(", ");
Serial.print(HR);
Serial.print(":");
Serial.print(MIN);
Serial.print(":");
Serial.println(SEC);
UpdateUSTime();
digitalWrite(dir1, HIGH);
if(MIN == 0)
{
for(int x = 0; x < 3500 && limit1 == 1; x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
limit1 = digitalRead(lms1);
}
}
else
{
for(int x = 0; x < (51.2*(MIN-MIN_P)); ++x)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
}
MIN_P = MIN;
}
}
if(HR_P != HR)
{
digitalWrite(dir2, HIGH);
if(HR == 0 || HR == 12)
{
for(int x = 0; x < 3500 && limit2 == 1; x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
limit2 = digitalRead(lms2);
}
}
else
{
for(int x = 0; x < (256*(HR-HR_P)); ++x)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
HR_P = HR;
}
}
void Show_USTime() //Function to move the needles to show the EST
{
rotate_zero();
UpdateUSTime();
int stephr = 0;
int stepmin = 0;
if(stepmin != USMin)
{
digitalWrite(MS1, LOW);
digitalWrite(MS2, LOW);
digitalWrite(MS3, LOW);
if(USMin <= 30)
{
digitalWrite(dir1, HIGH);
for(int x = 0; x < (51.2*USMin); x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
}
}
if(USMin > 30)
{
digitalWrite(dir1, LOW);
for(int x = 0; x < (51.2*(60-USMin)); x++)
{
digitalWrite(step1, HIGH);
delayMicroseconds(1000);
digitalWrite(step1, LOW);
delayMicroseconds(1000);
}
}
stepmin = USMin;
}
if(stephr != USHr)
{
digitalWrite(MS1, LOW);
digitalWrite(MS2, LOW);
digitalWrite(MS3, LOW);
if((USHr > 0 && USHr <= 6) || (USHr > 12 && USHr <= 18))
{
digitalWrite(dir2, HIGH);
if(USHr > 0 && USHr <= 6)
{
for(int x = 0; x < (256*USHr); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
else
{
for(int x = 0; x < (256*(USHr-12)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
}
if((USHr > 6 && USHr < 12) || (USHr > 18 && USHr < 24))
{
digitalWrite(dir2, LOW);
if(USHr > 6 && USHr < 12)
{
for(int x = 0; x < (256*(12-USHr)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
else
{
for(int x = 0; x < (256*(24-USHr)); x++)
{
digitalWrite(step2, HIGH);
delayMicroseconds(1000);
digitalWrite(step2, LOW);
delayMicroseconds(1000);
}
}
}
stephr = USHr;
}
}
void Neo_IN() //Function for the neopixel to show the daylight
{
if(HR >=6 && HR <= 9)
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color( 174, 214, 241 )); // Light blue color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
}
if(HR >=10 && HR <= 12)
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color( 249, 231, 159 )); // Yellow color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
}
if(HR >=13 && HR <= 16)
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color( 250, 215, 160 )); // Orange color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
}
if(HR >=17 && HR <= 19)
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color(247,220,143)); // Moderately dark blue color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
}
if(HR >=20 && HR <= 22)
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color( 36, 113, 163 )); // Dark blue color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
}
else
{
pixels.clear();
}
}
void Presence() //Function for the ultrasonic sensor
{
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
Serial.println(distance);
delay(1000);
if(distance > 20 && distance <=50)
{
Serial.println("Human within 10cm");
Show_USTime();
delay(10000);
Set_Needle();
}
else if(distance > 100)
{
if(HR < 6 && HR >= 23)
{
Serial.println("Human within 30cm");
Night_light();
}
}
}
void Night_light() //Function to turn ON the night light
{
for(int i=0;i<19;i++)
{
pixels.setPixelColor(i, pixels.Color(255, 244, 229)); // warm light color.
pixels.show(); // This sends the updated pixel color to the hardware.
}
delay(10000);
pixels.clear();
}
System Integration





Machines and Tools used
- ShopBot
- 3D printer
- Laser cutter
- Sand Blaster
- Roland MDX 20
- Soldering
Softwares used
- Autodesk Fusion 360
- Vcarve
- Inkscape
- GIMP
- Autodesk Eagle
- Cure Slicer
- MODS
- Arduino
Design Files
Licence

Time Keeper by Anooj Jacob is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.