The idea for the final project is to create a light, mobile sculpture that can either be controlled through MIDI, left in an autonomous, pre-programmed visualization, or left to react to ambient sound.
I want it to have an organic feel, maybe based on H.R. Giger's art but more alive, so i plan to have 4 retractable legs, and 4 or 8 ondulating tentacles, all around a central body. The overall shape/style is still not clear. The idea is to make something rather big, around 2-3 meters in diameter.
Optionally, if there's time, i want to add different control modes and input sensors:
- A heart-beat sensor to control the visualization.
- A glove with accelerometers to allow you to move the creature legs with your fingers remotely.
- A proximity sensor to react to human presence.
- An EEG-controlled visualization.
- A zeppelin based system so that the sculpture can hover around, powered with batteries.
- A system where the hovering zeppelin scultpure will follow you, tracking some device.
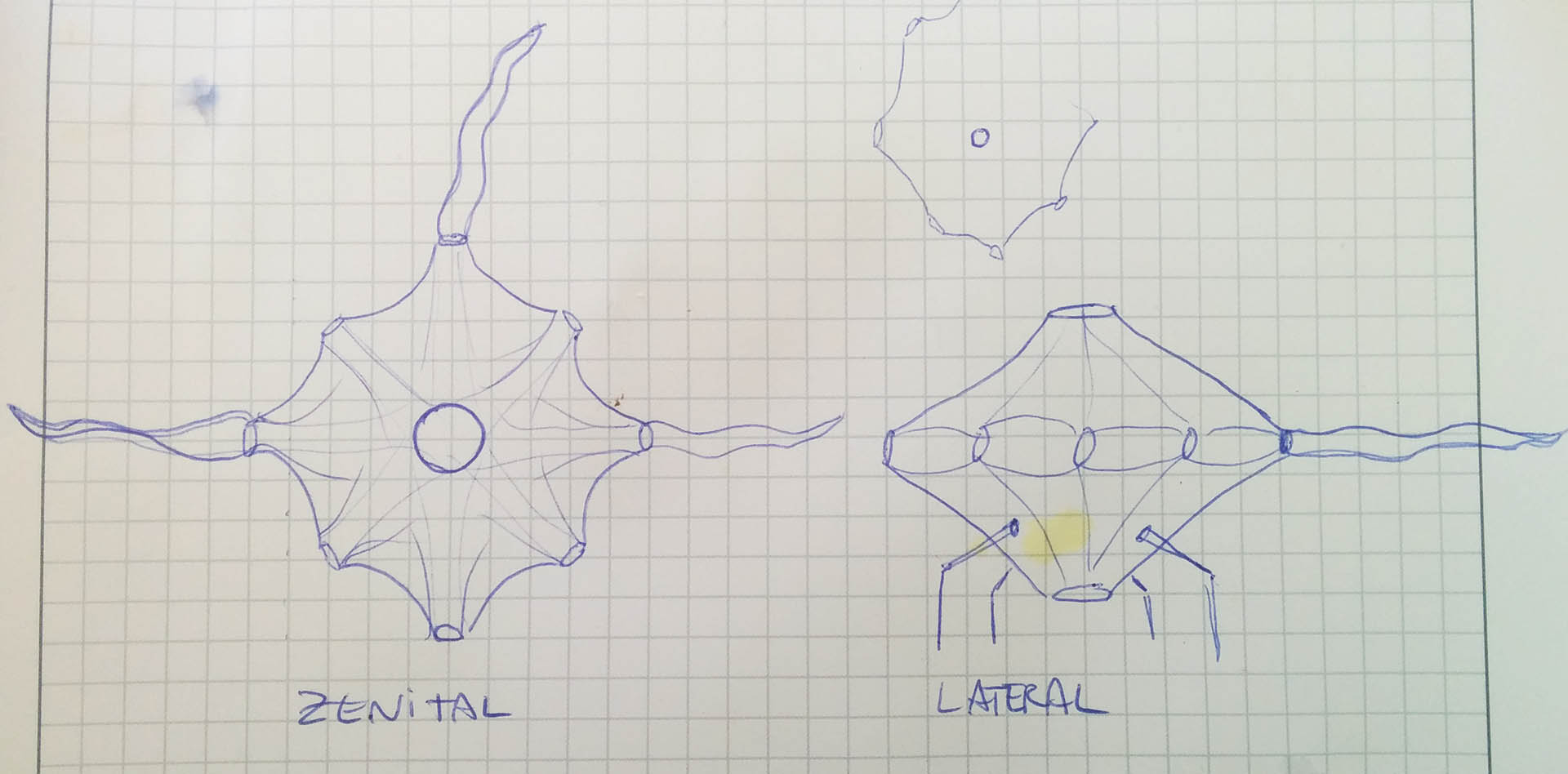
Here's a sketch with top and lateral views
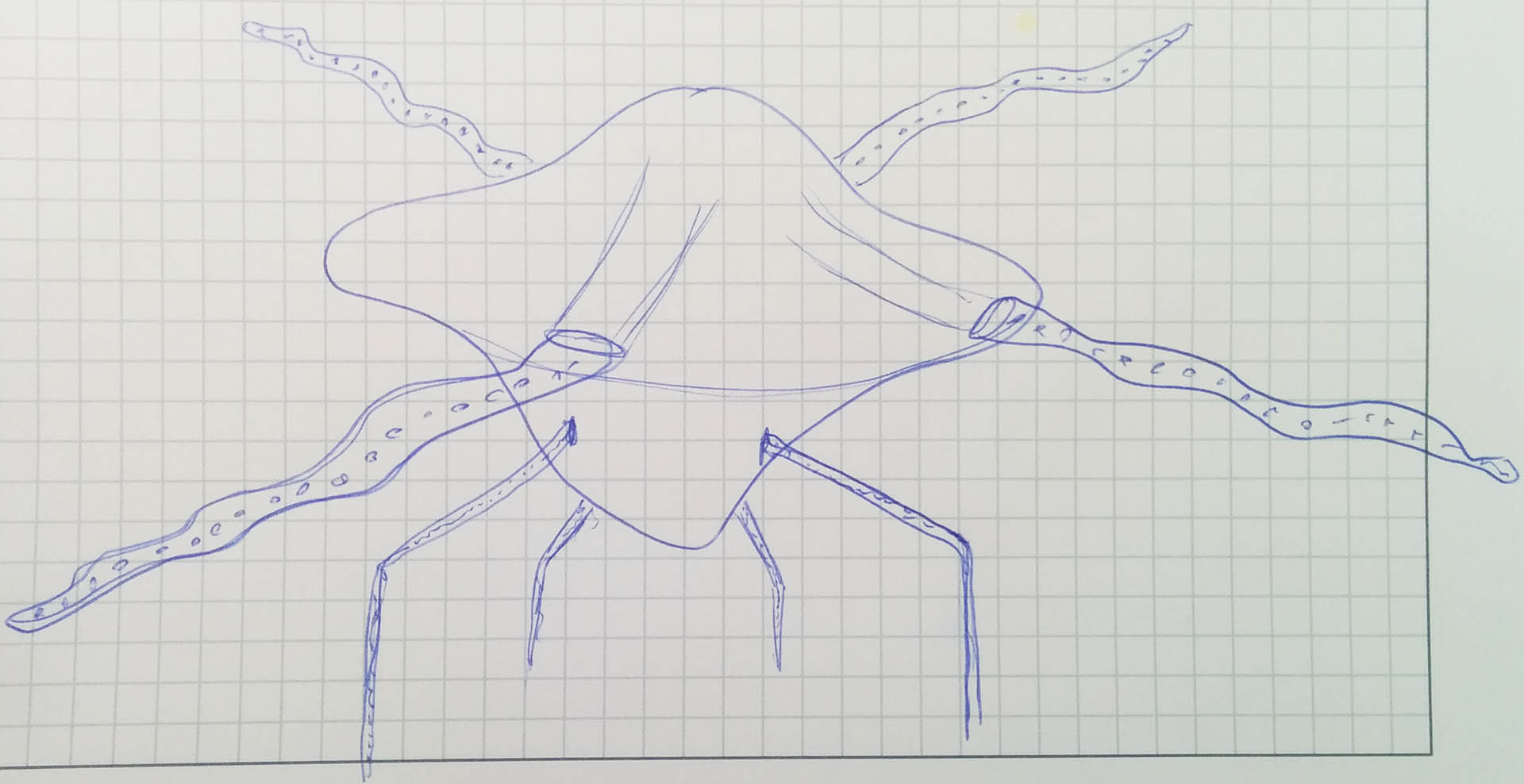
Quick try at a perspective. I still don't know what it will look like honestly:
The side tentacles would move by building a set of links, kind of like a toy articulated snake, and rotating the initial link of the chain. A good start point is this project from 2014, but i want to simplify it much more, i will only have one rotation axis and will let gravity do most of the work. https://fabacademy.org/archives/2014/students/wanders.linda/final-project.html
Here's some inspiration on how the legs would move, by Judith Hope. A 2 piece leg with a single joint where the first link is just moved up and down and the next one follows:
Here's something made by Juan Azulay for Sigur Ros that vaguely looks like what i have in mind (this was static)