12. Output devices¶
This week I worked on generating as the last electronic assignment an OUTPUT PCB system
Group assignment¶
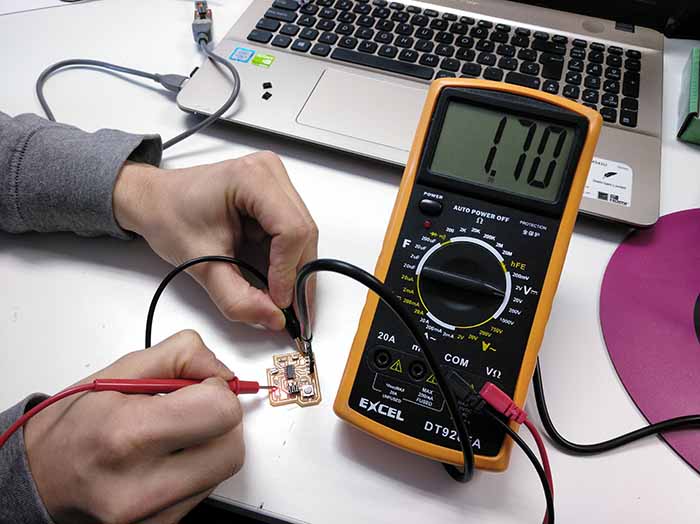
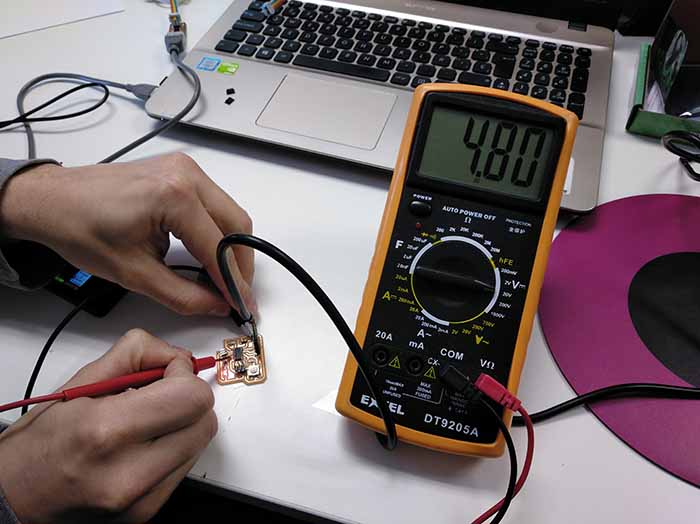
In this case all the remote students have been together to measure the power consumption of the PCB Hello Board. We loaded a sketch that makes the LED to turn on/off when you press the button and we supplied the PCB from the computer. Then, using a multimeter, we measured the voltage when the LED was on (4,8V) and off (0,0V). We also measured the consumption after the resistor (1,7V).
Here you can see in the video how does it works:
Power consumption from Elena Cardiel Garcia on Vimeo.
Now lets check the intensity of power in this output board when I connect one step motor:
Components¶
I will need the following components:
- 1x DC motor - 1x ATtiny44 - 1x Shunt voltage - 1x Motor Driver A4950 - 2x 1uf capacitor - 1x 10uf capacitor - 1x 10k resistor
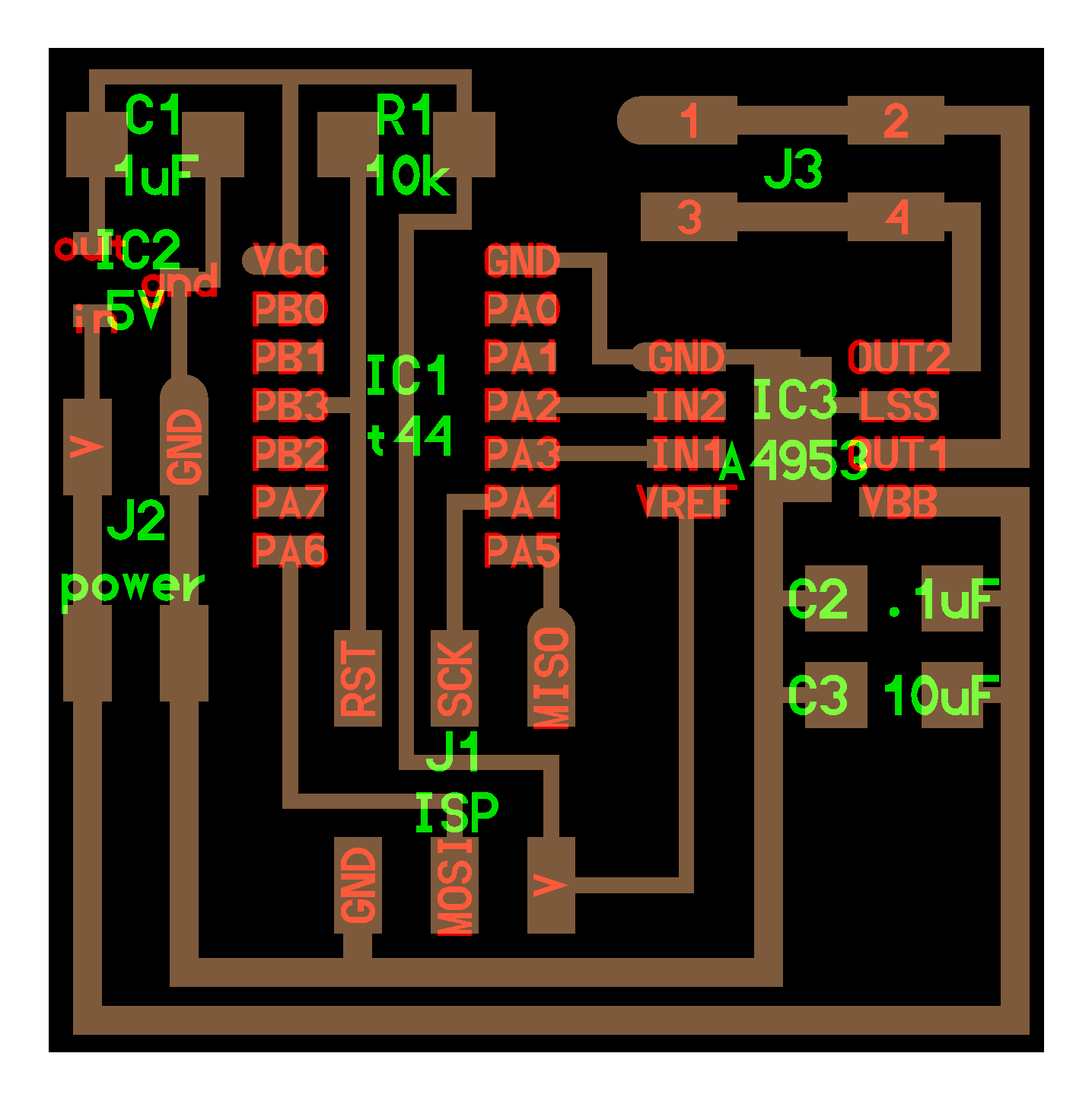
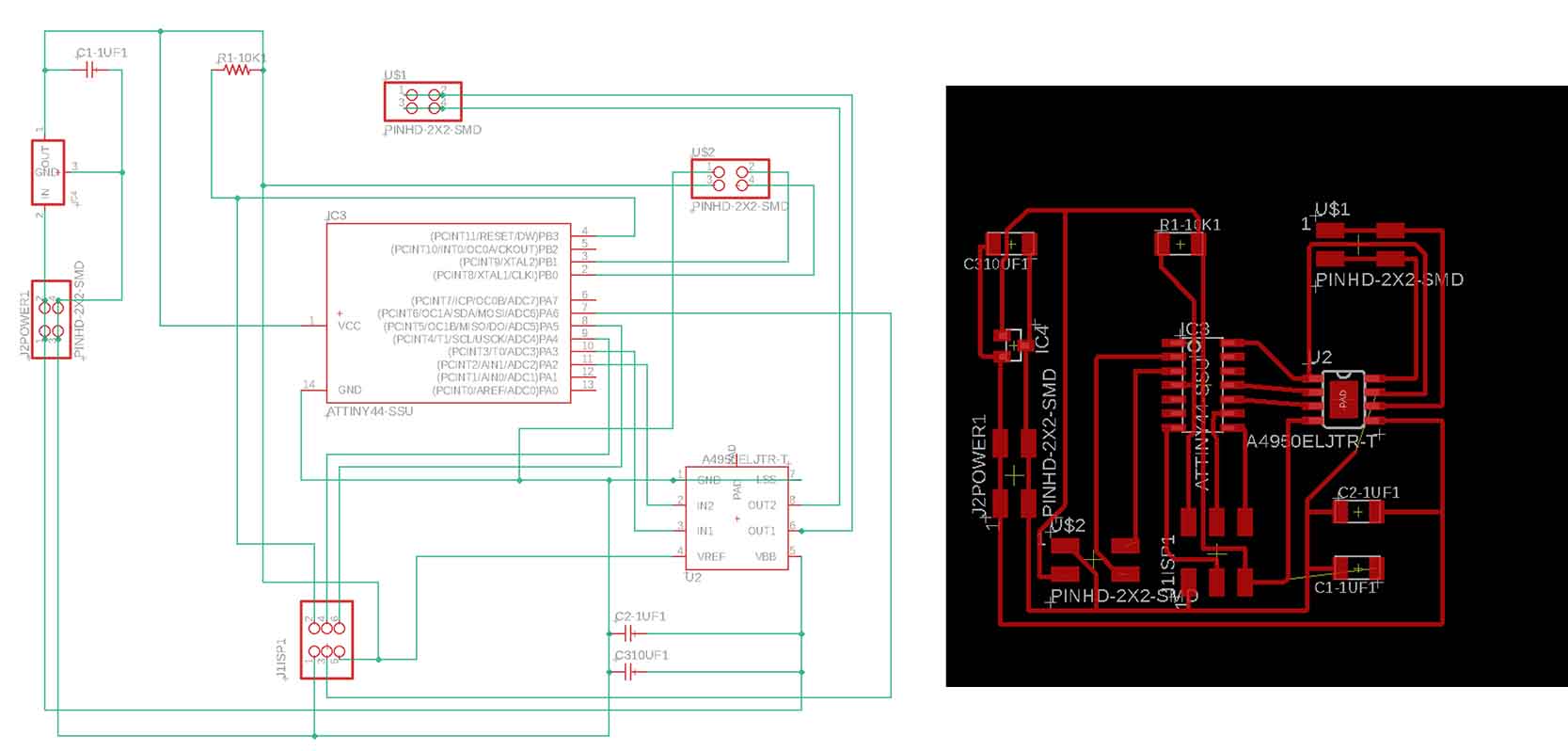
Designing the BOARD¶
As we see in the assignment 7 we have to open Eagle and follow the previous instructions. I have based my design in Fab Academy Files:
{kind=link}
{kind=link}
But first of all you need to instal a library for the drivers of the motors. I want to say thank you to Mike Ferguson to provide me here: [Allegro library(https://github.com/mikeferguson/eagle/blob/master/libs/allegro.lbr)
I have done many version to use a motor in different ways (explaining scroll down each step and decision)
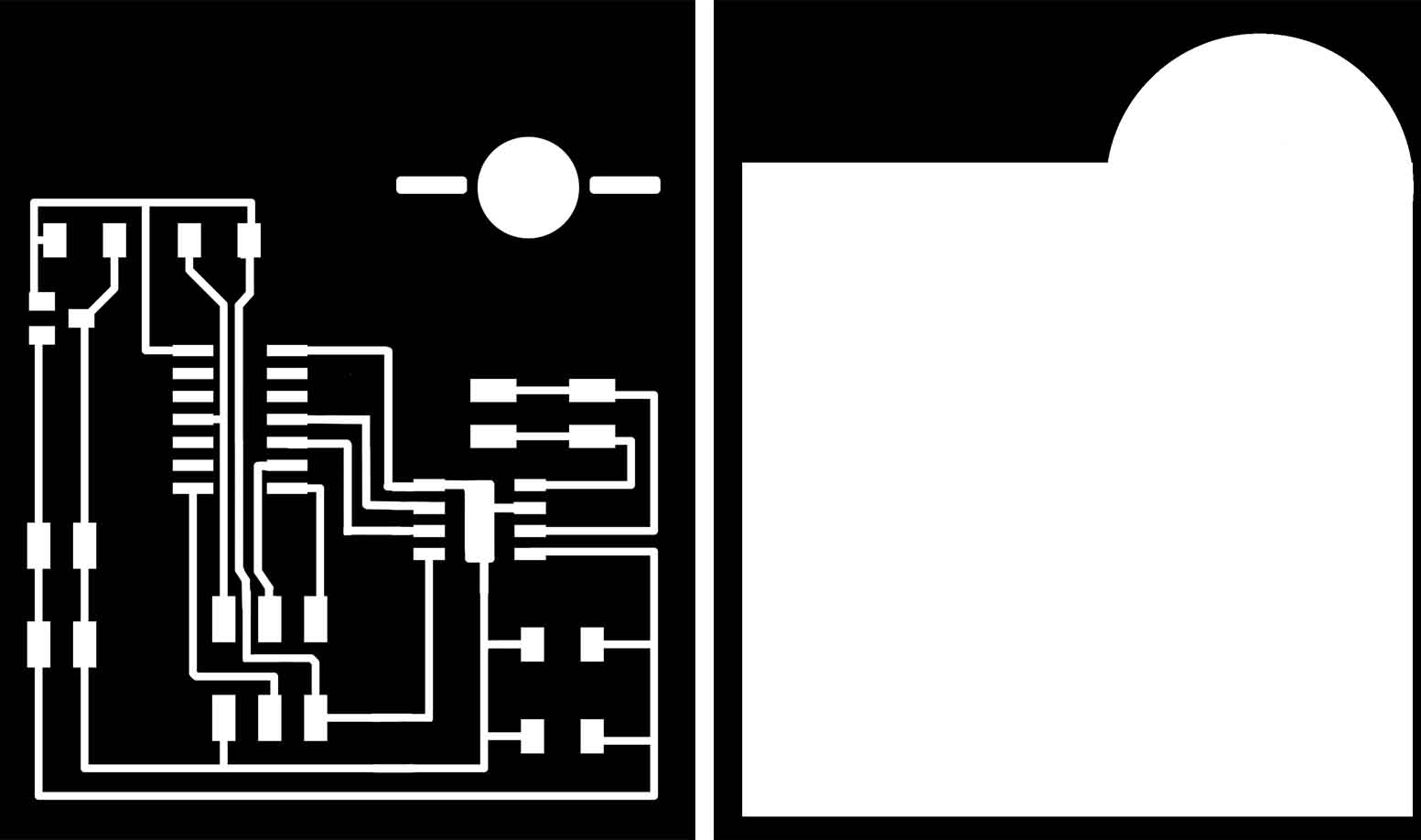
Once more time as we have seen in previous works, I used Photoshop to generate a PCB with DC motor integrated in the same board.
This is the second version with a BUS connector
here are the files V.2:
{kind=link}
{kind=link}
Then I change to Servo motor because I discovered it will be more accurate for my final project and useful. First based on Neil’s design but modified to connect the motor with the BOARD
{kind=link}
{kind=link}
I give up ATtiny44 as I will explain while programming and based onEidha Al Rashdi I generate a new board, in this case adding 4 pines for one accelerometer sensor thinking in the final project.
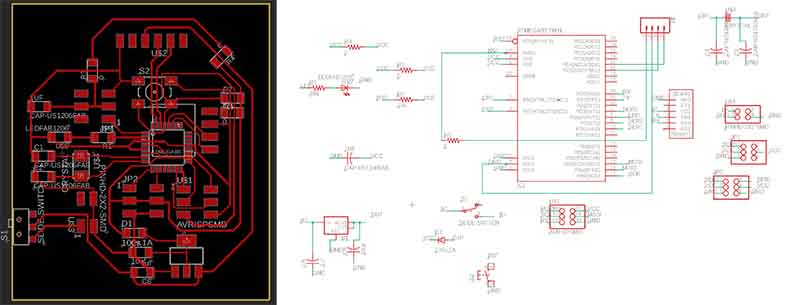
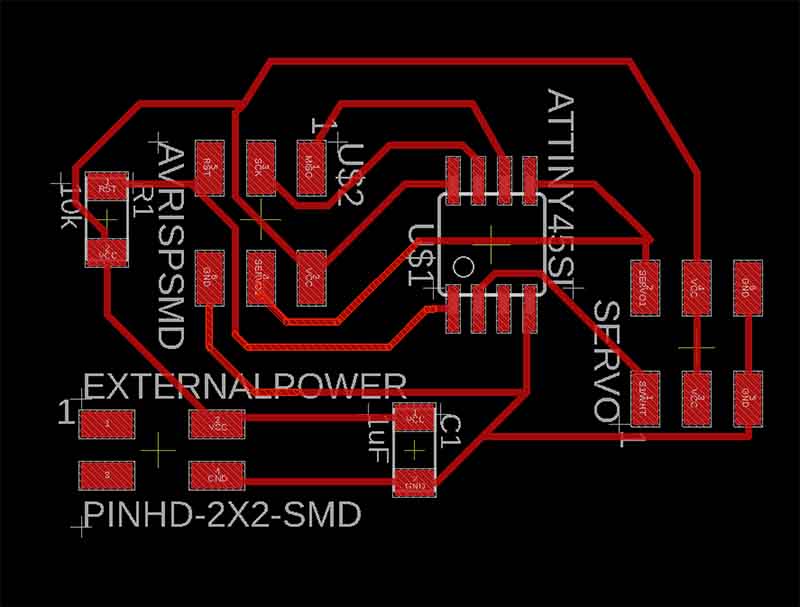
Finally I move in a desperate attempt to achieve do something good in this assignment move again to a Attiny45
{kind=link}
{kind=link}
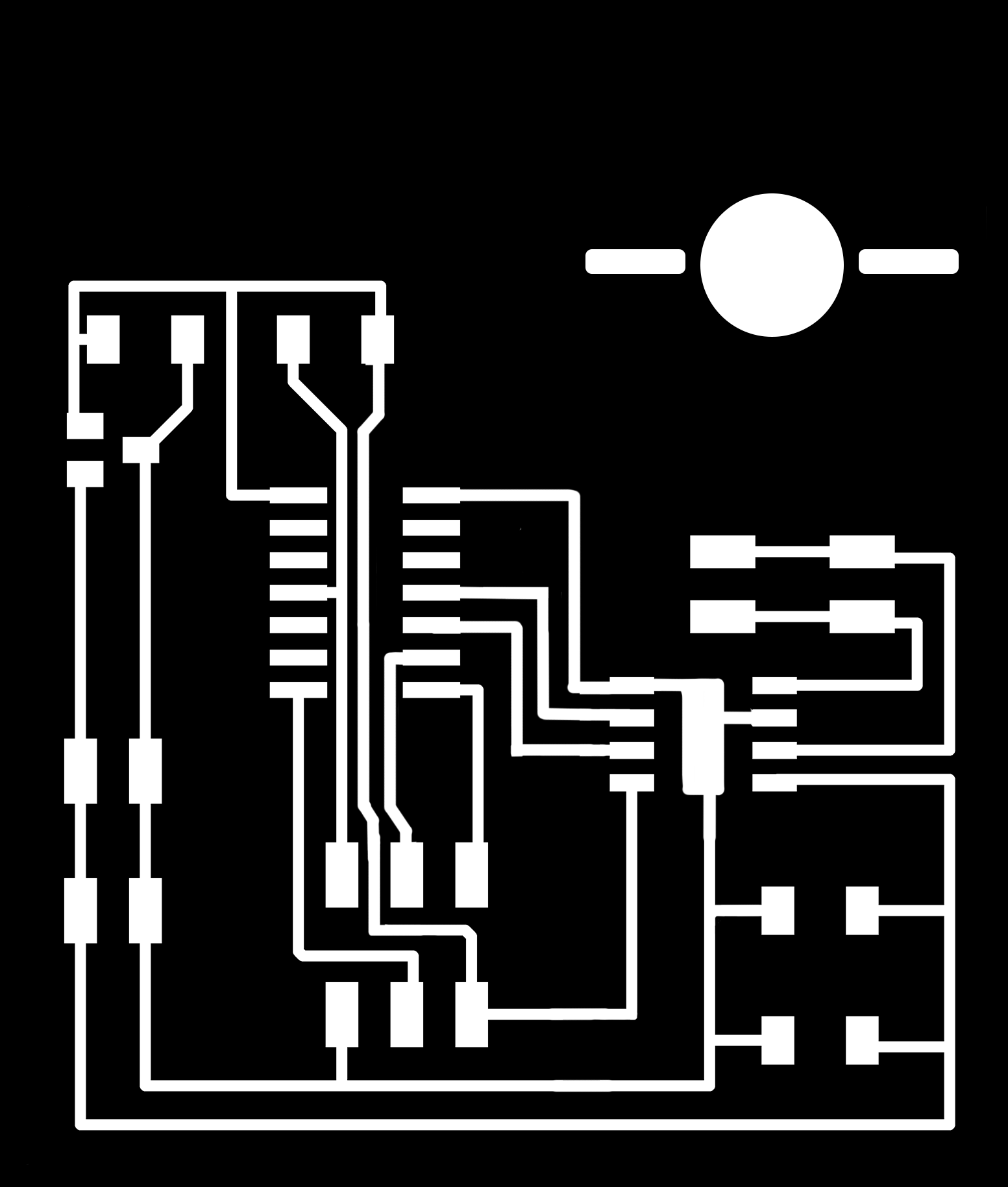
PCB Add-ons¶
I have used Illustrator to finishing the Boards, I explain here the process.
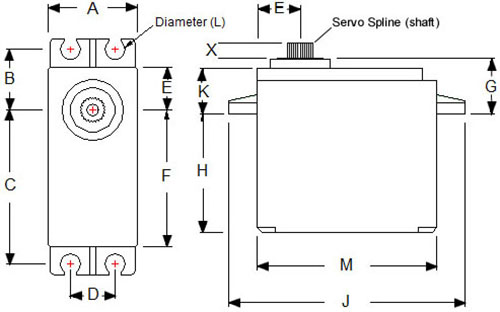
But you will need the measures of different parts of every motor;
and then with the ellipse tool just placed it helping you with some line guides.
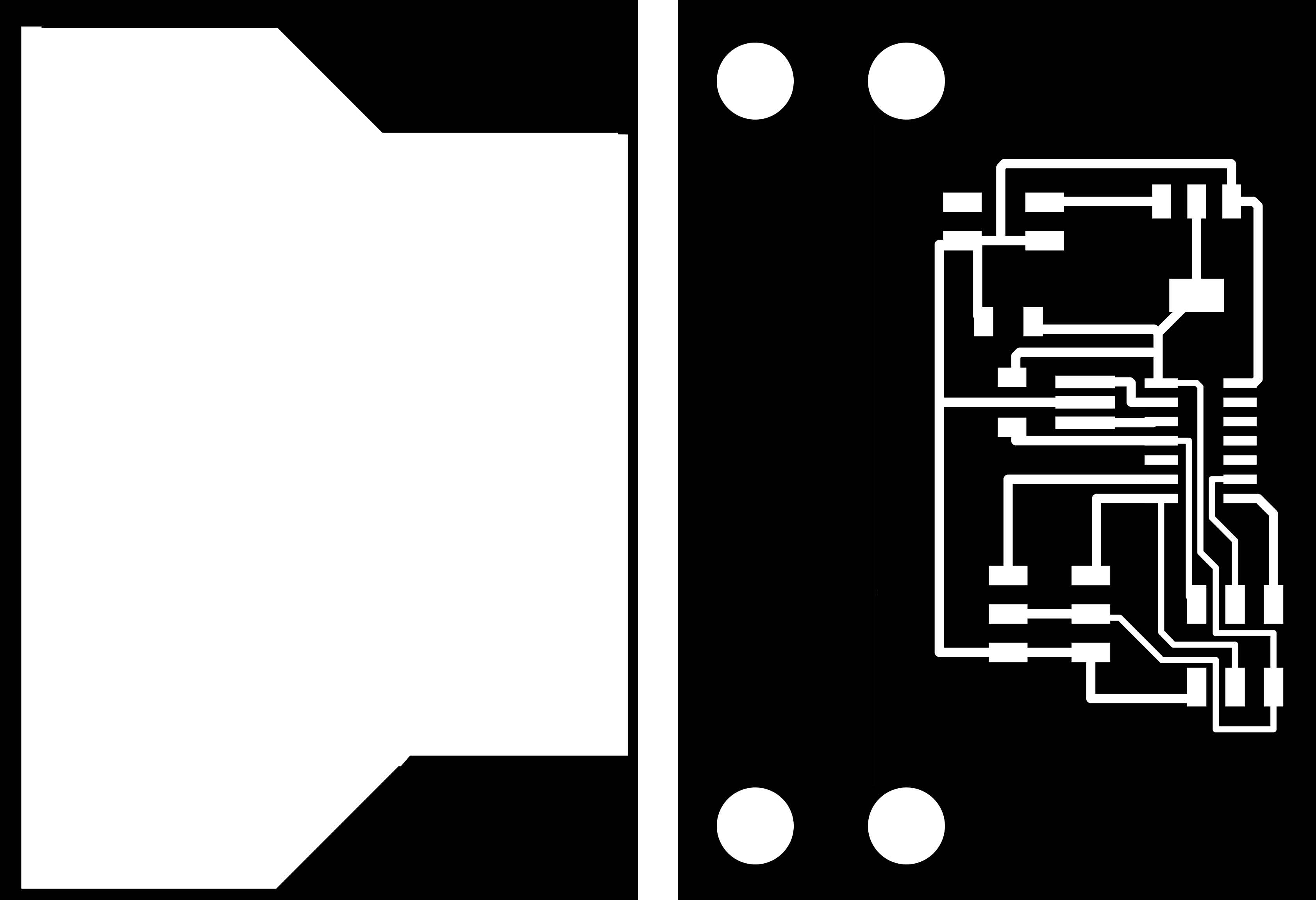
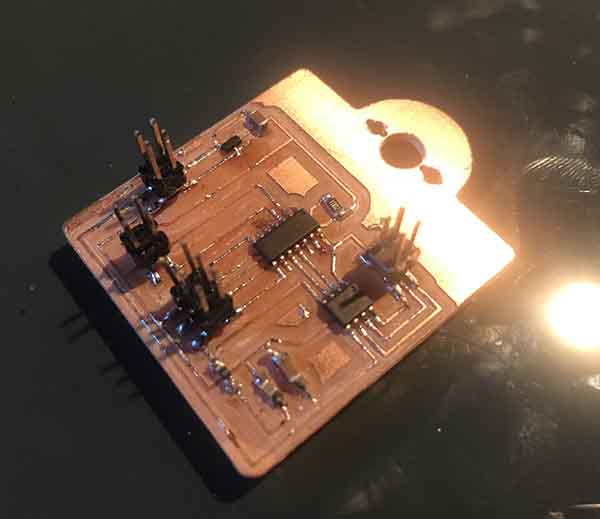
Milling the PCB¶
After fabModules and milling the copper board you will have something like this:
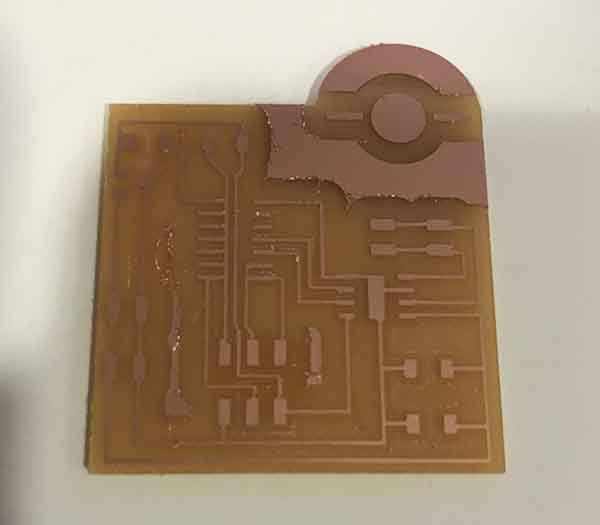
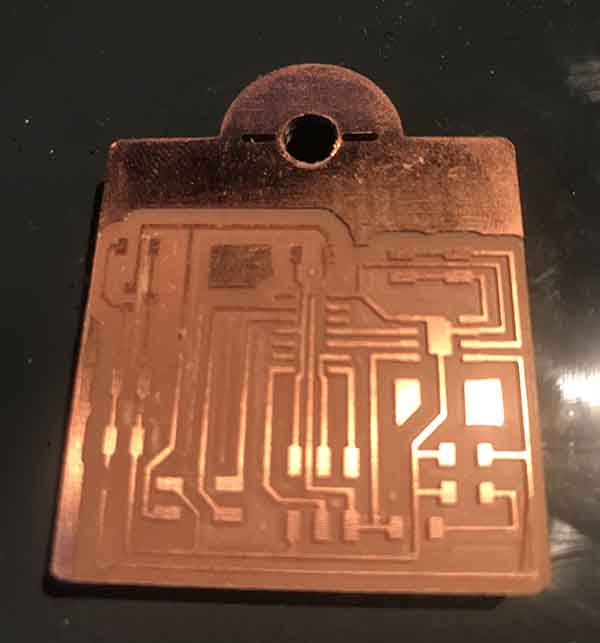
I made something wrong!! because I wanted to make a hole in the copper circle, but I don´t want to waste material, so with a drill it could be the same.
Here are the files of FabModules
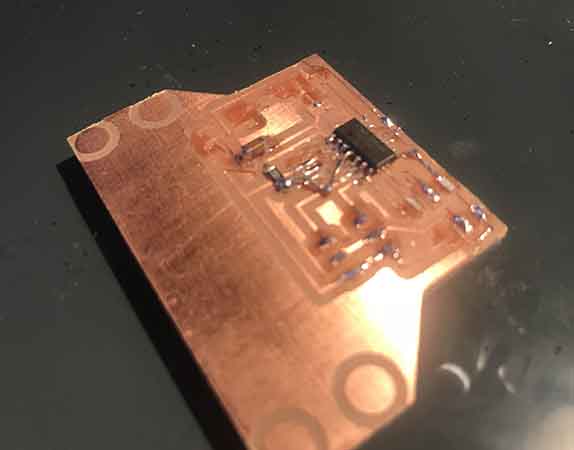
This is the v.2 BOARD
I don´t have any pictures of the following boards I did when I milling… But you can see in the whole process.
Soldering the components¶
Now just solder all the components that are lines above and make the holes in the marks.
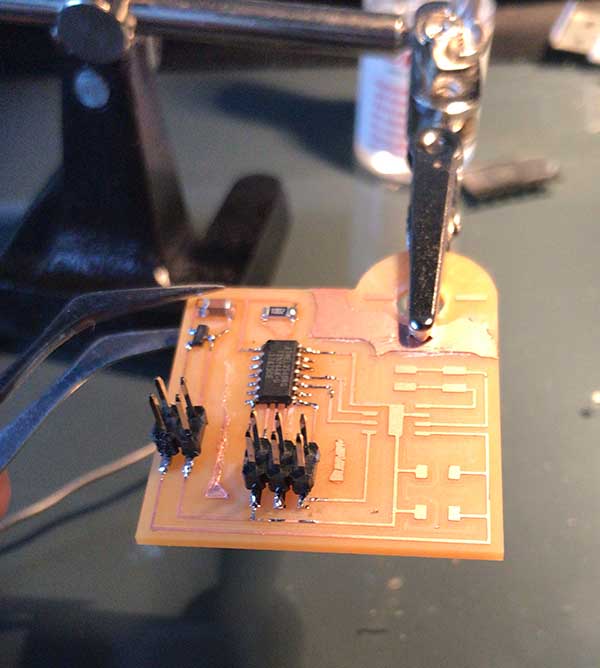
After, you will have something like this:
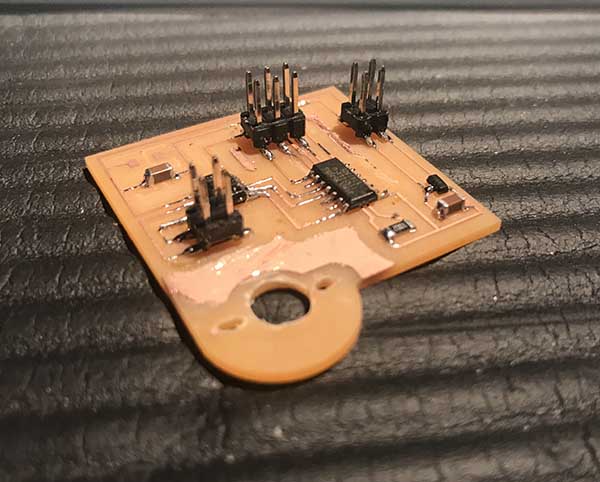
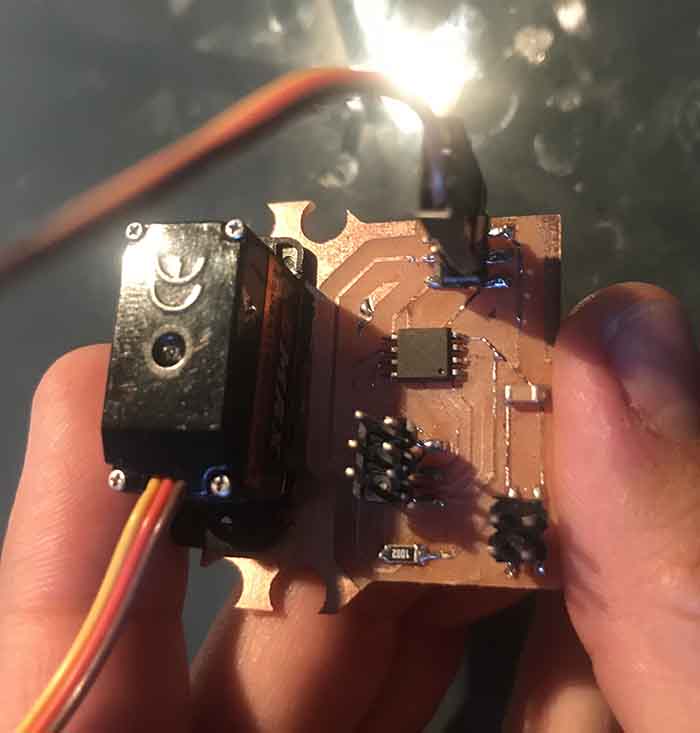
This could be the result as I expected, one only piece the board and the motor.

v.2 BOARD
v.3 with servo motor ( in this case it doesn´t work too and I needed the components so I unsolder it)
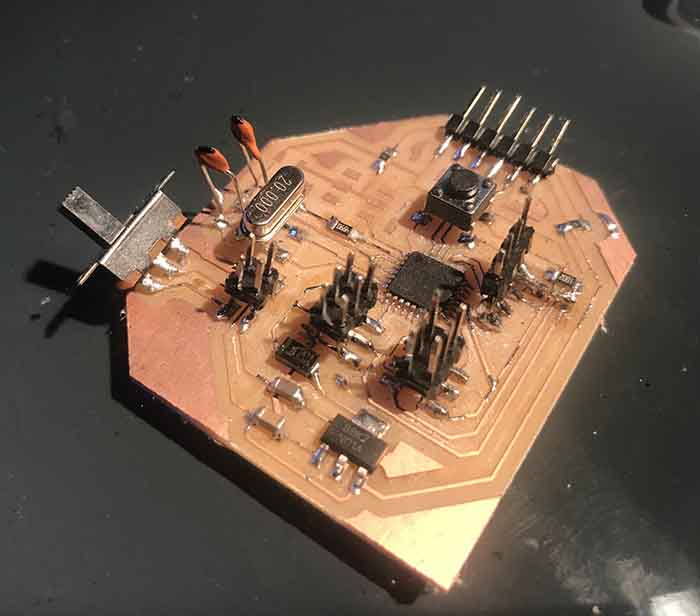
V.4 Board modified of atmega 328 with more pines for accelerometer
v.5 Board with attiny45
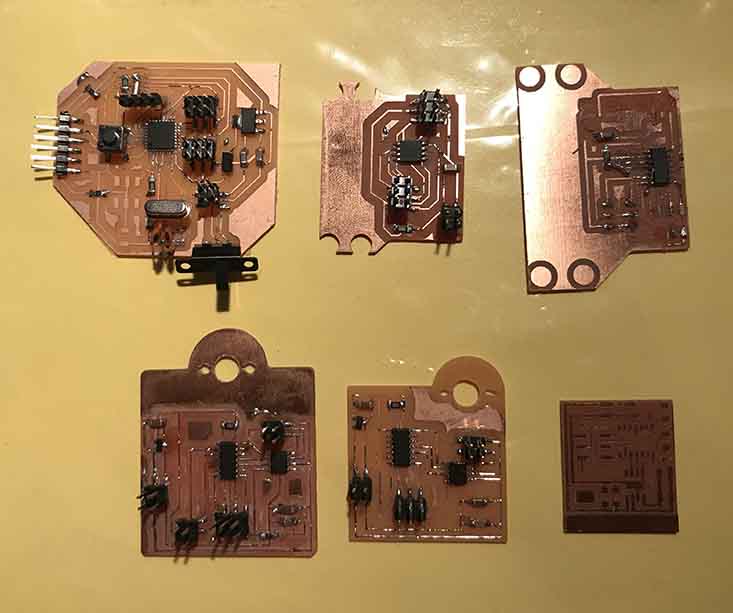
Here all the boards I have design and milling and done
Programming¶
I had my first problem with programing !!
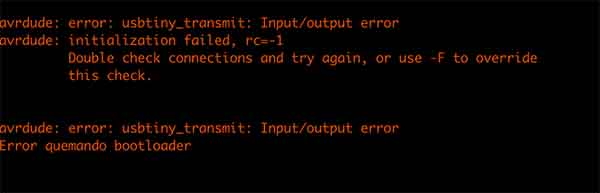
After check few times continuity between pines and did solders again.
So I did another board implementing now the BUS connector to because now I have been learning how to do it. but I had the same error
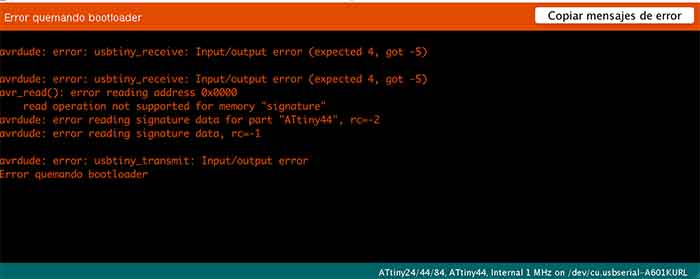
I change to a Servo motor This is the error now with the new board! it is fantastic …
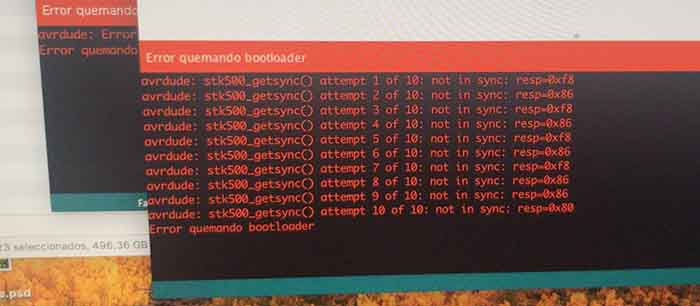
Then searching in Fab Academy website, from other partners that did the same exercise with servo motors, I could read this text:

So I move to a new board with ATmega 328 instead of ATtiny44.
Here I was thinking to drop out FabAcademy, because I couldn´t understand what was happing and why it was wrong!
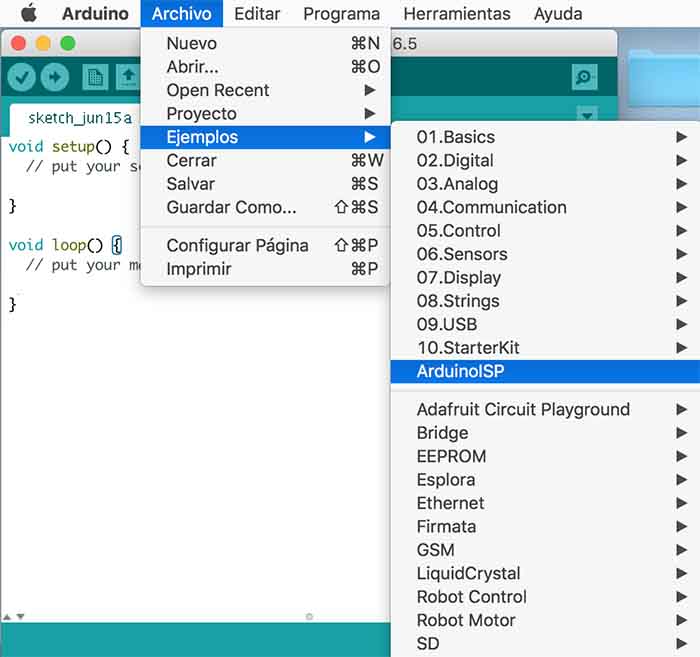
When I moved to attiny45 I decided to learn how to program a board with Arduino uno, (just to have more resources)
Firs you need to install this in your arduino:
Then select your board, etc and important Arduino as ISP
Here is working the servo!!
This is what I wanted for the final project Just a servo motor that could move 45º every time something happen.

Este obra está bajo una licencia de Creative Commons Reconocimiento-NoComercial-CompartirIgual 4.0 Internacional.